The ART Project’s Nuclear Inspection Centaur Robot
After the earthquake last year and the resulting damage to the Fukushima nuclear plant, observers criticized Japan’s lack of preparedness. In particular, many felt that the Japanese robotics sector’s focus on expensive humanoids had squandered time and resources better spent on more specialized robots. However, this isn’t totally accurate. The Japanese government, corporations, and universities have been working on robots for just this sort of problem for decades. Back in the 1980's the Japanese government invested 20 billion JPY (still less than $100 million dollars at the time) into a massive eight-year program to build three types of advanced robots for hazardous environments.
The ART (Advanced Robotics Technology) Project had goals that were too big for any one institution to achieve, so a consortium called ARTRA (Advanced Robotics Technology Research Association) was formed. Financed and controlled by the Agency of Industrial Science and Technology, ARTRA brought two major government organizations, the Mechanical Engineering Laboratory (MEL; now known as AIST) and the Electrotechnical Laboratory (ETL), together with 18 corporations under the same banner, along with the support of academia.
The ART robots were designed for three major areas: nuclear plants, undersea oil rigs, and a third for disaster prevention in refineries.
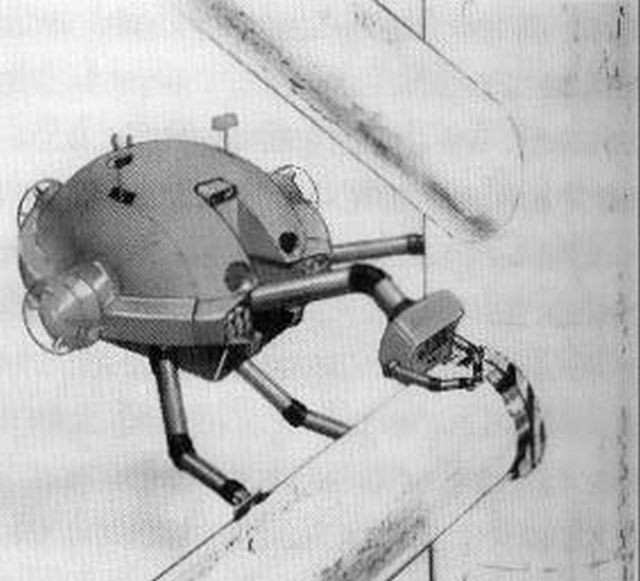
The undersea robot looked like one of the pods from 2001: A Space Odyssey, with multiple arms and manipulators. It would have to function 600 feet underwater, in tides moving at 2 knots, and in very poor visibility. Finally, the disaster response robot would put out fires with a hose, move on six legs (each ending with a wheel) and had an arm for closing valves. It would have to work for thirty minutes despite temperatures in the range of 400 degrees (750 degrees Fahrenheit).
For more on the 1984-93 Japanese ART Project, see here.
See other early Underwater Robots here.