The ART Project’s Nuclear Inspection Centaur Robot
After the earthquake last year and the resulting damage to the Fukushima nuclear plant, observers criticized Japan’s lack of preparedness. In particular, many felt that the Japanese robotics sector’s focus on expensive humanoids had squandered time and resources better spent on more specialized robots. However, this isn’t totally accurate. The Japanese government, corporations, and universities have been working on robots for just this sort of problem for decades. Back in the 1980s the Japanese government invested 20 billion JPY (still less than $100 million dollars at the time) into a massive eight-year program to build three types of advanced robots for hazardous environments.
The ART (Advanced Robotics Technology) Project had goals that were too big for any one institution to achieve, so a consortium called ARTRA (Advanced Robotics Technology Research Association) was formed. Financed and controlled by the Agency of Industrial Science and Technology, ARTRA brought two major government organizations, the Mechanical Engineering Laboratory (MEL; now known as AIST) and the Electrotechnical Laboratory (ETL), together with 18 corporations under the same banner, along with the support of academia.
The ART robots were designed for three major areas: nuclear plants, undersea oil rigs, and a third for disaster prevention in refineries.
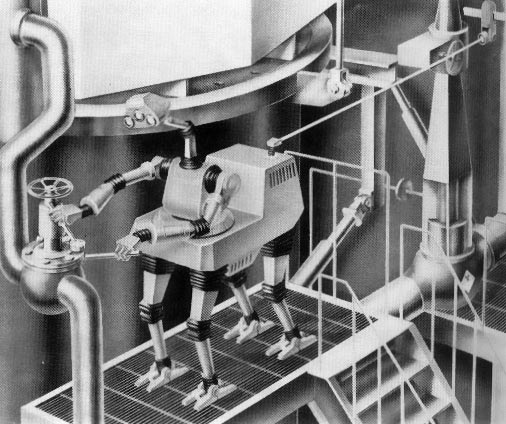
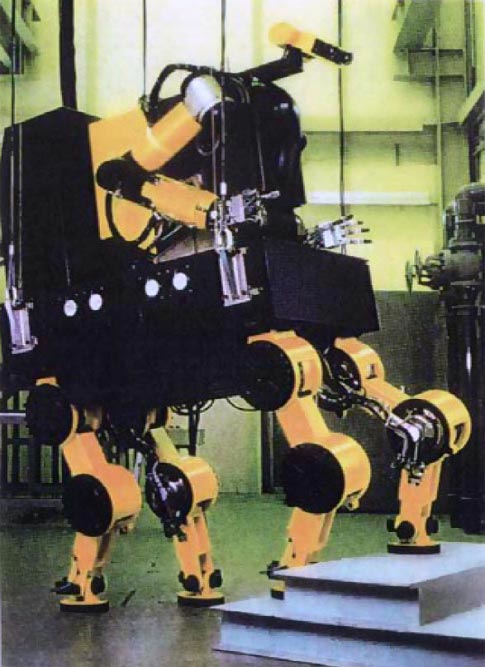
The nuclear inspection robot would have a sensor head, four legs, two 7-DOF arms, and four-fingered hands with pressure sensitive finger tips (this configurarion led to it being known as the Centaur robot). It would be paired with a smaller, wall-climbing partner that used suction cups to adhere to wall surfaces. This would allow it to “climb up and down stairs, step over piping or other impediments, and relocate itself at high speed.”
It would have to work in 70 degrees (158 degrees Farenheit), 90% humidity, and 100 roentgens of radiation per hour. What started as a 1/3-scale model of the four-legged mechanism eventually became a robot measuring 188 cm (6’2″) tall, 127 cm (4’2″) long, and weighing 700 kg (1,543 lbs).
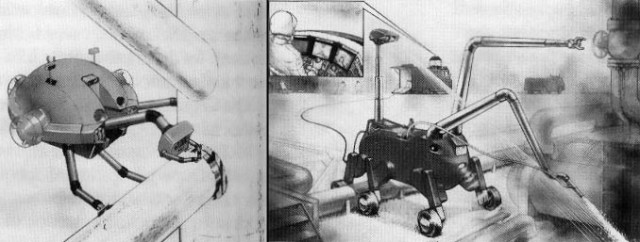
The undersea robot looked like one of the pods from 2001: A Space Odyssey, with multiple arms and manipulators. It would have to function 600 feet underwater, in tides moving at 2 knots, and in very poor visibility. Finally, the disaster response robot would put out fires with a hose, move on six legs (each ending with a wheel) and had an arm for closing valves. It would have to work for thirty minutes despite temperatures in the range of 400 degrees (750 degrees Fahrenheit).
Susumu Tachi, director of the robotics department at MEL at the time, was in charge of developing the robots’ teleoperation system. Although the robots were intended to have some degree of autonomy, the majority of their work would be done under the direct control of a human operator. Basically, the human operator would wear 3D glasses or some other head-mounted display, and control certain robot functions using haptic controls and a pair of joysticks. Later Tachi established a lab at Keio University, where many unique “tele-existence” projects would take shape.
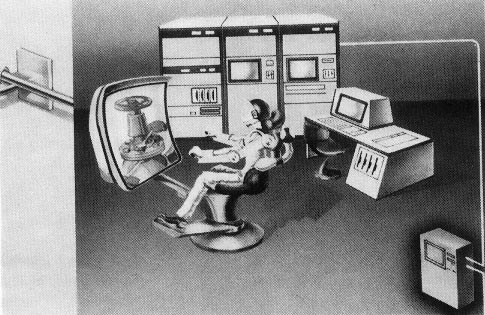
Teleoperating the Centaur nuclear plant robot
The first conceptual illustrations were unveiled in 1984, but the actual construction of the robots wouldn’t begin until 1987. There was a great deal of conflict between ARTRA members, not to mention over 40 research themes, so a huge amount of preparation work had to be completed. One researcher called the nuclear inspection robot’s configuration the result of “a lack of imagination”, and Shigeo Hirose (of TITECH’s Hirose-Fukushima Lab) had this to say about it:
“It’s almost impossible to use a four-legged robot in a nuclear reactor. The passageways are too narrow, and it’s supposed to carry a huge load of equipment. I don’t think it’s practical, and I keep telling the people in charge that they should use a snake design, which no one else has used. We need a more functional design.
I think the whole thing is a mess. They’re starting out without a long-range, completed vision, but with many corporations and a great deal of politics involved. The result, I fear, will be a very boring robot.”
Part of the reason the nuclear inspection robot has legs is because Hitachi won the contract to work on it, having worked with Waseda University on bipedal robots. The Waseda-Hitachi Legs [WHL-11] appeared at the Tsukuba Expo ’85. Somewhat prophetically, Hitachi’s Hideo Maki had this to say about the Centaur robot:
“I think two legs is the ideal, and I would like to develop such a robot, but technologically that’s ten to fifteen years in the future, so we’re settling for four. Professor Kato says that man used to walk on all fours, but that when he stood up and freed two of his limbs, a whole new world opened up for him. Our robot has four legs, and two arms, and we think it will yield the same results.”
Changes in specifications along the way also slowed progress. For example, Hitachi (responsible for building the Centaur robot’s legs) had planned for the robot to carry up to 100kg (220 lbs), but then the companies responsible for the sensors and other equipment kept making requests, forcing redesigns. The researchers studied the walking gaits of horses, elephants, hippos, and rhinos in an effort to better replicate four-legged walking, resulting in a speed of 2.5 kph (1.5 mph).
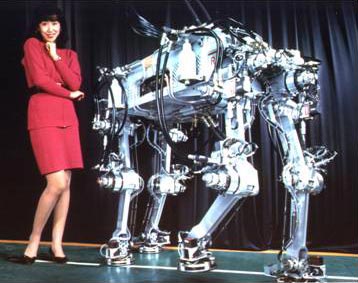
One of three Hitachi quadrupeds developed circa 1990
In 1993, the robot appeared in the Japanese pavilion at the Taejon Expo in South Korea. By that time the prototype had successfully completed a few trials, but didn’t make the jump into real use. And sadly, both photos and video of the robot experiments are extremely scarce, despite it being such a large project. Hitachi, for its part, says that the lessons learned from this and other robot projects are reflected in their recent robots, such as the EMIEW humanoids.
Many household names can be found in the following breakdown of responsibilities. Some of these corporations were selected because of their prior involvement with similar technologies. Hitachi, Mitsubishi, and Toshiba, for example, had developed robots for nuclear plants independent of the ART project. And Kawasaki, which builds Japan’s submarines, played a significant role in the development of the undersea robot.
1. Basic Technologies
A. Locomotion
MEL
ETL
Fuji Electric R&D
Yaskawa Electric
B. Control
MEL
ETL
C. Systems Support
ETL
Int’l Robotics & Factory Automation Center
2. Nuclear Plant Robot
A. High Reliability
Mitsubishi Electric
Mitsubishi Heavy Industries
Japan Power Engineering & Inspection
B. Radiation Resistance
Hitachi
Japan Power Engineering & Inspection
C. Locomotion
Hitachi
JGC Corp
Toshiba
Japan Power Engineering & Inspection
D. Manipulation
Mitsubishi Heavy Industries
Fanuc
Japan Power Engineering & Inspection
Fujitsu
Toshiba
E. Remote Control
Mitsubishi Electric
3. Undersea Robot
A. Undersea Robot Positioning & Navigation:
Mitsui Engineering & Shipbuilding
Kawasaki Heavy Industries
Sumitomo Electric Industries
B. Undersea Robot Vision
Oki Electric Industries
C. Undersea Robot Manipulation
Kawasaki Heavy Industries
Komatsu Ltd.
D. Undersea Robot Supervisory Control
Oki Electric Industries
Mitsui Engineering & Shipbuilding
4. Disaster Prevention Robot
A. Durability
Ishikawajima-Harima Heavy Industries
B. Sensors
Matsushita Research Institute
NEC Corp.
C. Environment Adaptation
Ishikawajima-Harima Heavy Industries
Kobe Steel
Int’l Robotics & Factory Automation Center
Much of the information in this article was assembled from Frederik Schodt’s Inside The Robot Kingdom, which has a more detailed account of the project.
Source: Plasticpals
See other early Teleoperators and Industrial Robots here.
See other early Walking Machines here.