
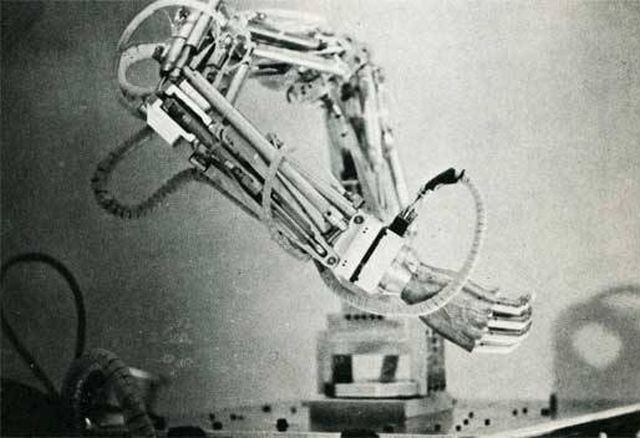
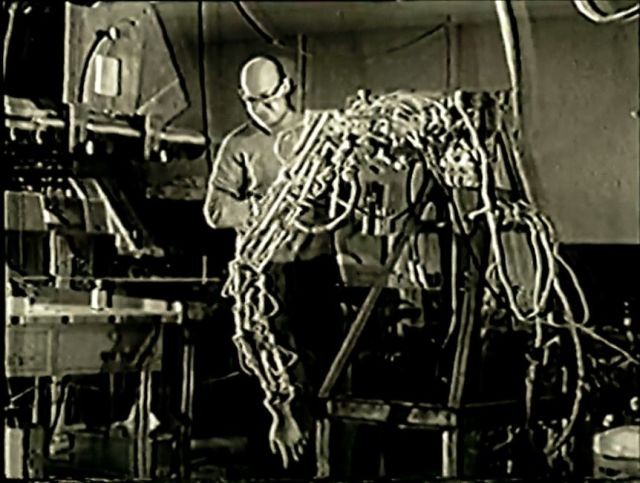
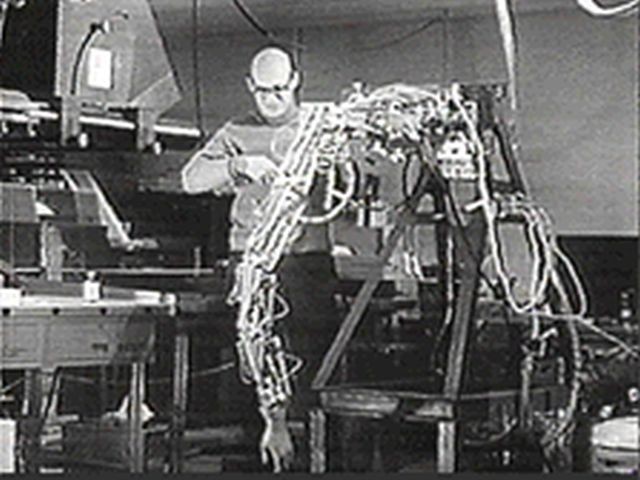
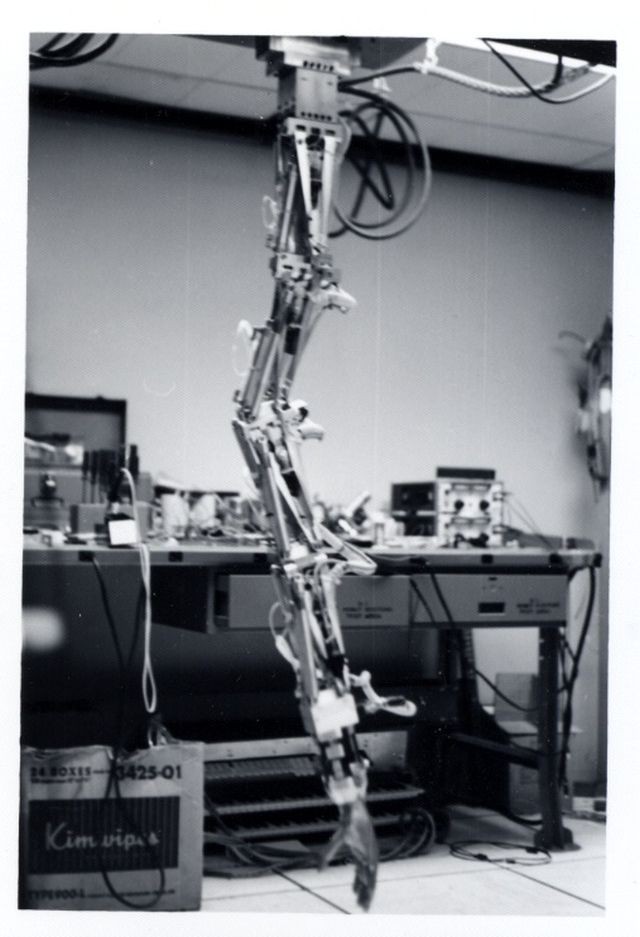
Marvin Minsky with his Arm. Photo by Dan McCoy in OMNI Magazine, June 1980. Also called the "Tentacle" Arm.
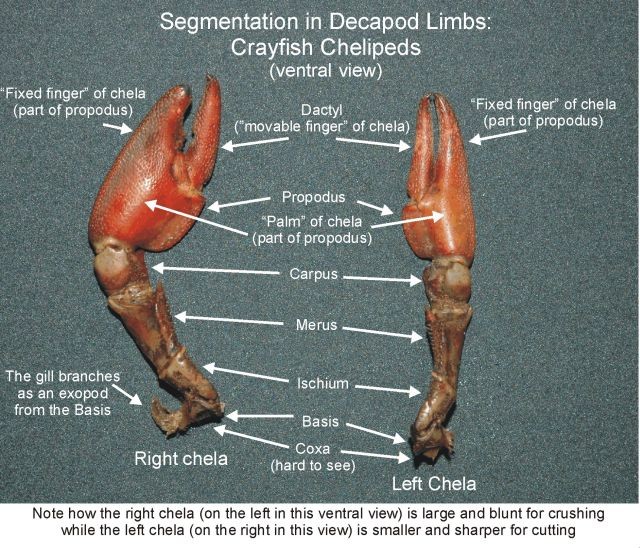
Marvin Minsky – Activating a dead crayfish claw
Selected transcript "And that’s the anatomy of the mechanical arm I built that you see in the MIT Museum today"
One of the first things that happened was I was in… having read about McCulloch and Pitts and starting to read about the nervous system, I found a laboratory where people were working on nerves. And this was run by a professor named John Welsh at Harvard. And… it’s a nice story because the Harvard Biological Laboratory is a huge building and this building was new at this time. We’re talking about 1949 or… it must have been '48 or '49. So, the building was two thirds finished and almost empty. So, I encountered this Professor Welsh and said I was interested in learning more about nerves and things like that. And he said: 'Well, we do a lot of experiments with invertebrate nervous systems and we’re…we're interested in how the crayfish claw works.' It’s a little arm. The joints of the arm are tetrahedra. They’re sort of hinged this way and then at right angles. The next hinge is this way and the next one is this way. And that’s the anatomy of the mechanical arm I built that you see in the MIT Museum today. It's… the joints are modelled on the joints of the crayfish claw. But anyway, Dr. Welsh said: 'The interesting thing about this crayfish claw is that it’s so easy to get at the nerves because…' he took out a crayfish and he said: 'You just break the limb off like this and pull it just like this and there’s this little transparent thread sticking out.' And it’s right there and you can see it with the naked eye and it consists of five nerves. And with a magnifying glass you can… and a needle, you can separate the five nerves. And one of them is an inhibitor nerve, so that if you stimulate with this nerve, the claw will close. Or, if you stimulate another nerve, it’ll move here but… you find the one that causes the claw to open and close. And then if you stimulate this other one, which is smaller, that’s the inhibitor nerve, it’ll open again even… so, I arranged a set of five switches and batteries or something – no, they must have been AC things – so that I could mount this crayfish claw here and the five nerves are connected to these five switches and… actually, I had it on potentiometers so you could vary the signal.
And after a couple of days, I got this thing arranged so I could get the crayfish claw to reach down and pick up a pencil and pick it up again. And… John Welsh called all the other biologists in and said: 'Look at this' and… I was interested that they were so interested because… it seemed like such an obvious thing to do. So, he also… and you could get new crayfish every day because somebody drove up to some lake and… nearby and got them. And then, he also had me do some experiments with turtle hearts. And I don’t remember what these experiments were, but the main thing is that if you irrigate these things with cold water… these invertebrates are wonderful because these are cold blooded animals. And the turtle heart will work for a week if you just run Ringer’s solution through it and you can do really complicated experiments with almost no equipment.
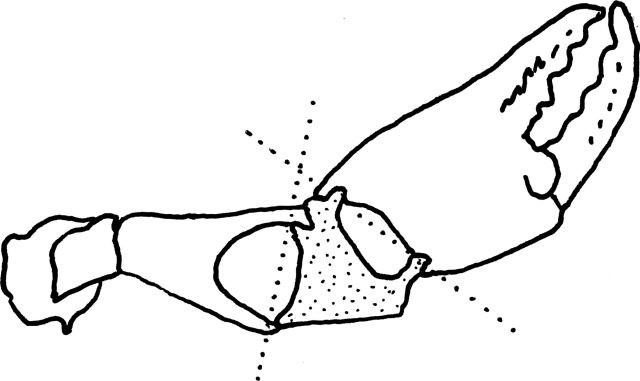
‘Hooke's joint’ in the claw of a crab. (After Willis.20)
Hooke's joints in nature – Willis20,32 also pointed out that—as is commonly found with useful mechanisms—nature achieved it first. The claws of a crab and other crustaceans embody a hinged plate of cartilage that acts as an asymmetric cross in a Hooke's joint, permitting articulation around two inclined axes (above).
20 Willis R. – Principles of mechanism 1870 Longmans Green London.
32 Moon F. – Robert Willis and Franz Reuleaux: pioneers in the theory of machines, Notes Rec. R. Soc. 2003 57, 209 230; erratum, ibid., p. 353.
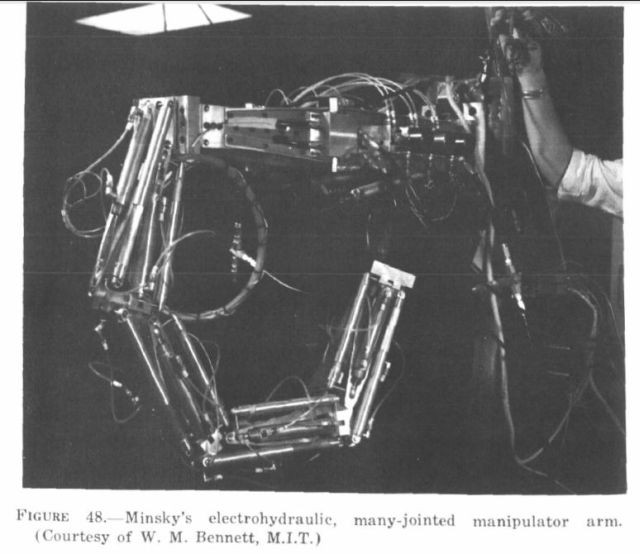
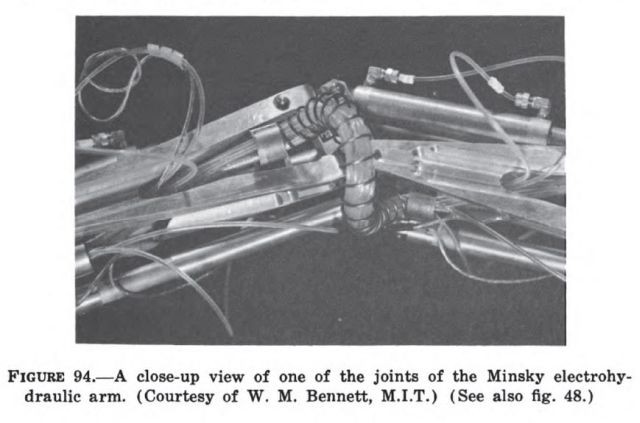
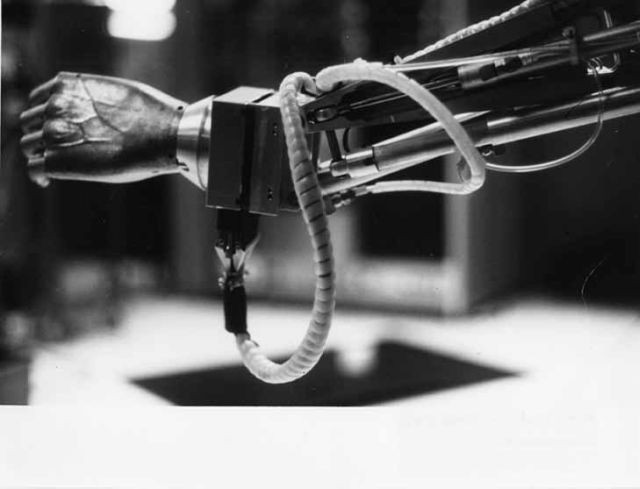
Two other undersea manipulator development efforts have unique features. One is the ten-jointed electrohydraulic arm built by Marvin Minsky's group at M.I.T. (fig. 94 below). Each of the joints has a single degree of freedom and is actuated by a hydraulic piston. A position transducer parallels the piston to insure that the arm assumes the same configuration as the replica control. This arm will eventually be computer-controlled.
Sophisticated control must supersede simpler switchboxes. The many-jointed electrohydraulic manipulator designed by Marvin Minsky, at M.I.T. under sponsorship of the Office of Naval Research, illustrates the potentialition of model control and the trend away from anthropomorphic configuration in undersea work .
Source: Teleoperators and Human Augmentation, NASA: by W. R. Corliss – 1967



Marvin Minsky's secretary Lucy riding on the Minsky-Bennett arm.
Bill Bennett in a M.I.T. workshop.

Bill Bennett demonstrating the enclosed arm..

The articulated control arm.
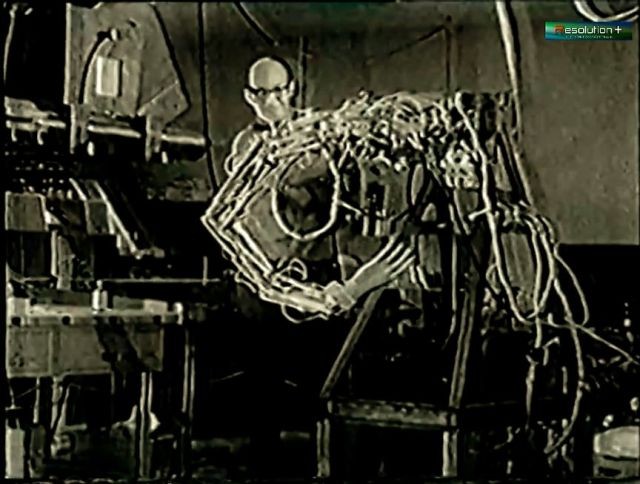
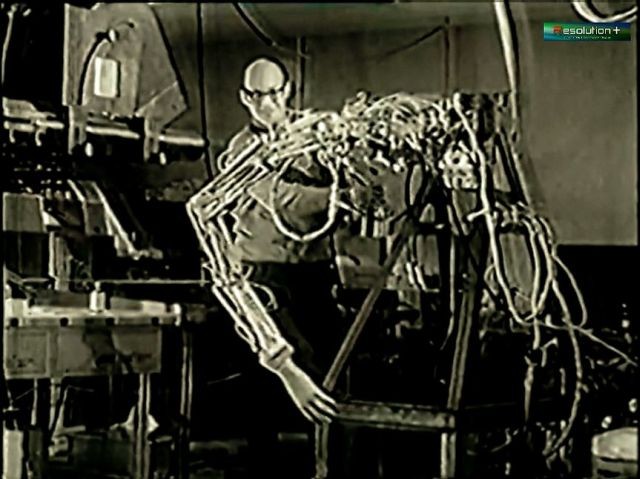

Still images from the video clips.
Images from The Computer Museum:

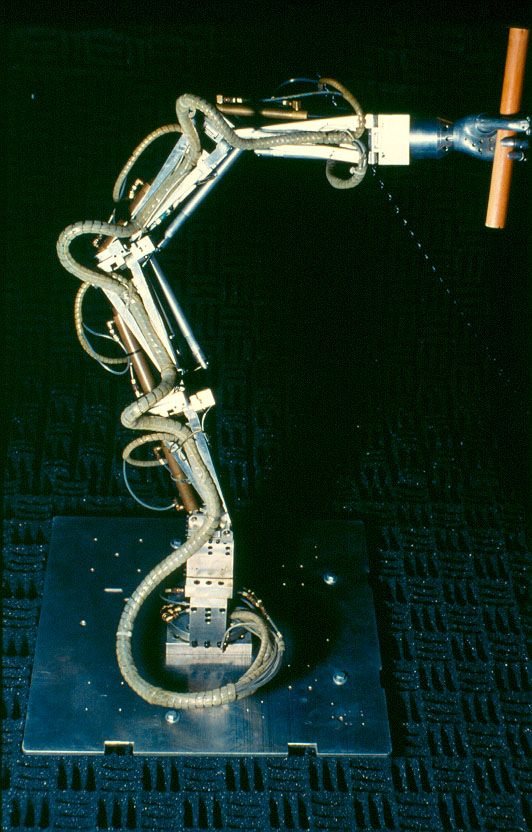
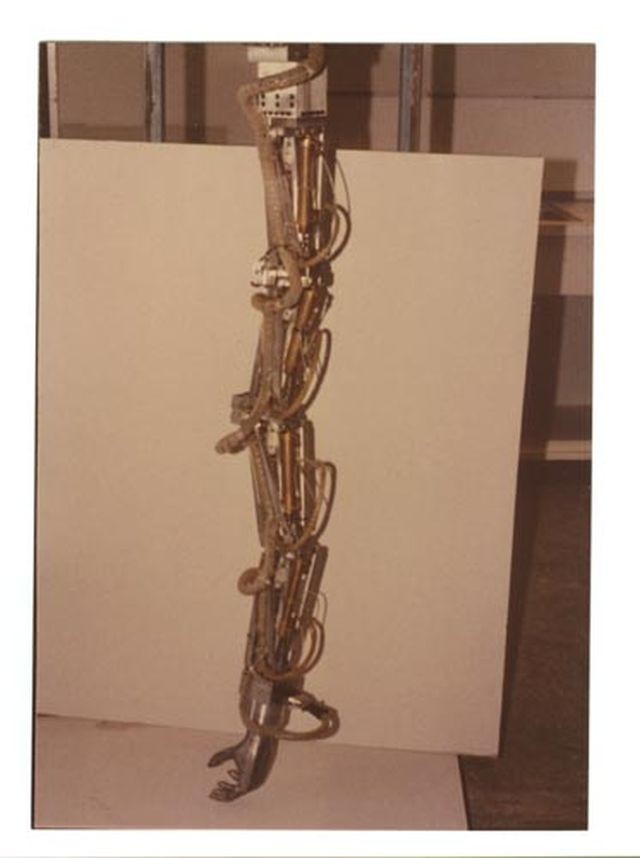
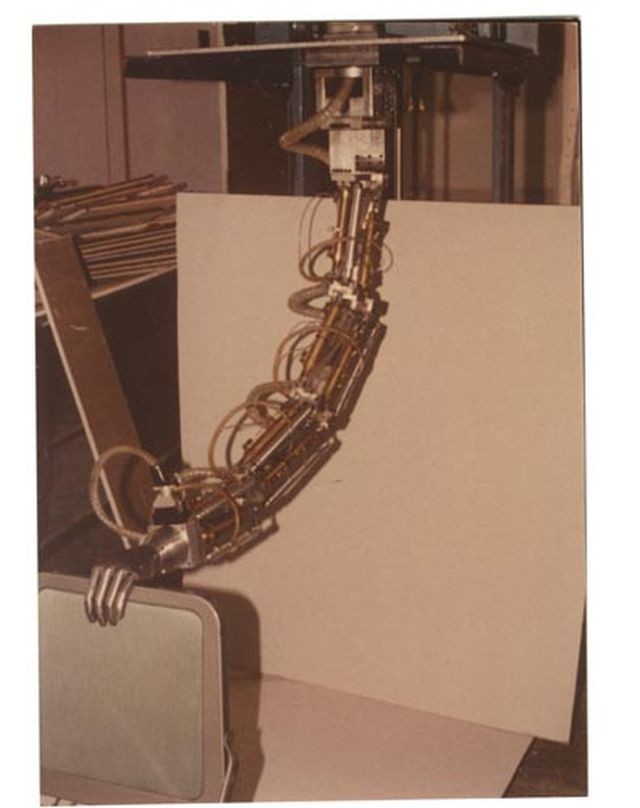
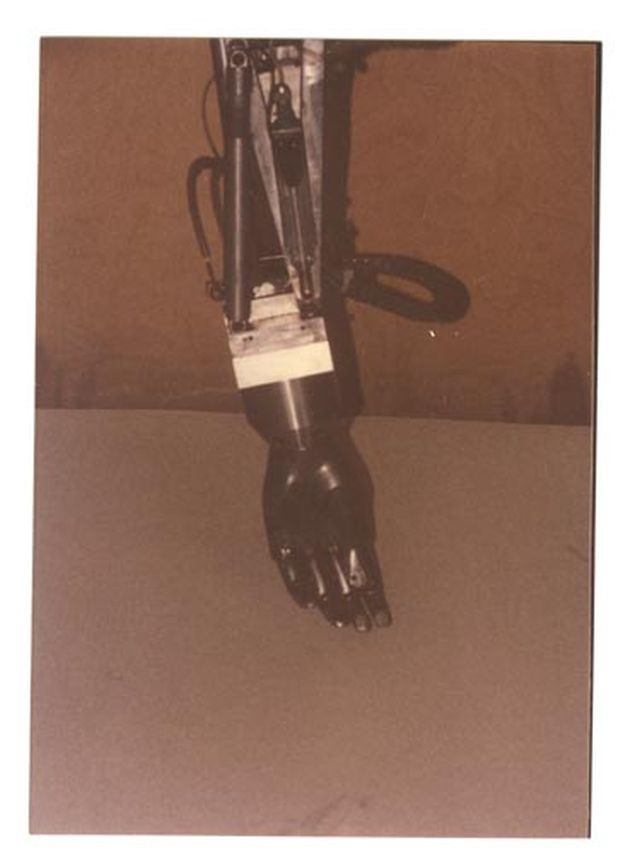
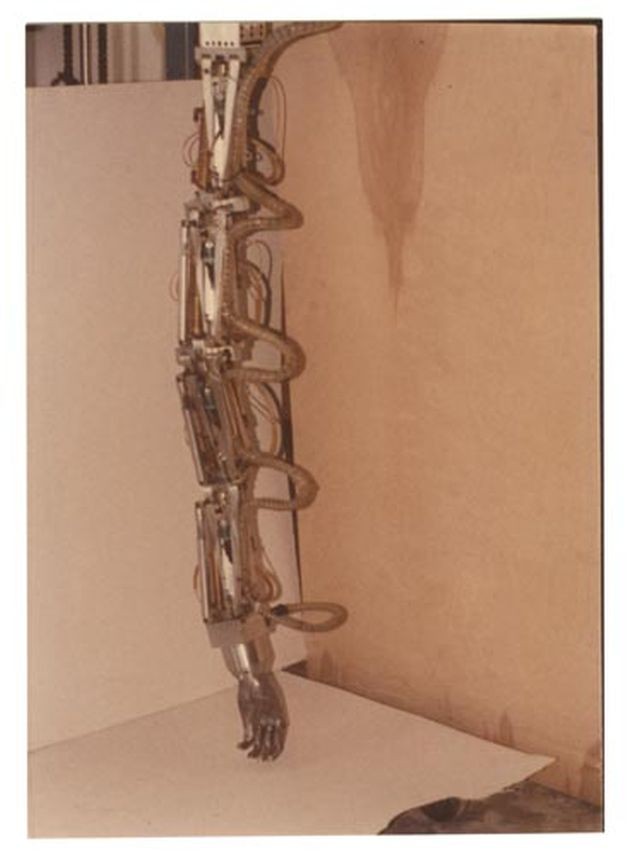
Color (sepia) image of the Minsky Arm. It's "hand " has curled fingers. A white board has been placed behind the arm to aid in viewing the arm.
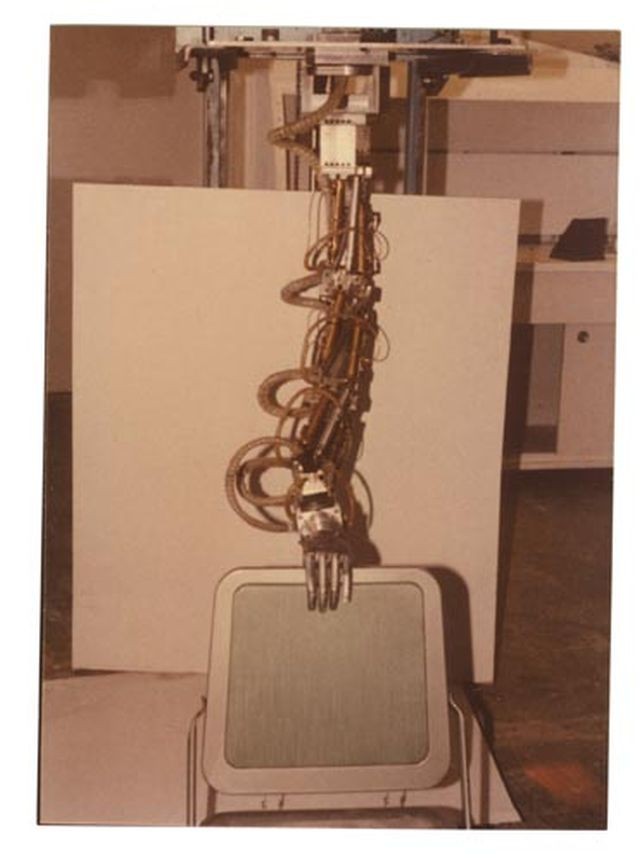
Color (sepia) image of the Minsky Arm. It's "fingers" are clasping the back of a metal chair. A white board has been placed behind the arm
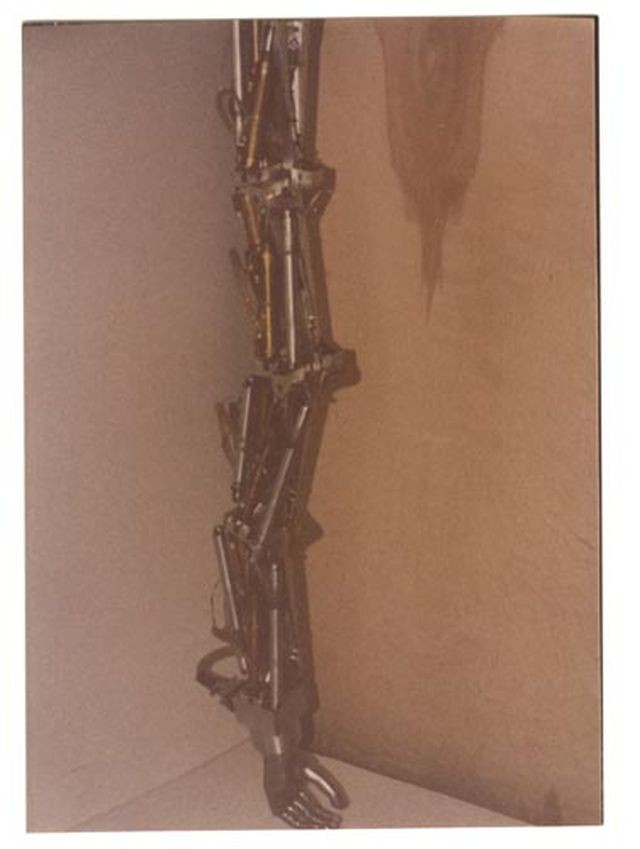
to aid in viewing the arm. The Minsky Arm was created by Marvin Minsky at MIT in 1968. It has 12 single degree freedom joints and a hand.
It was controlled by a PDP-6 computer.
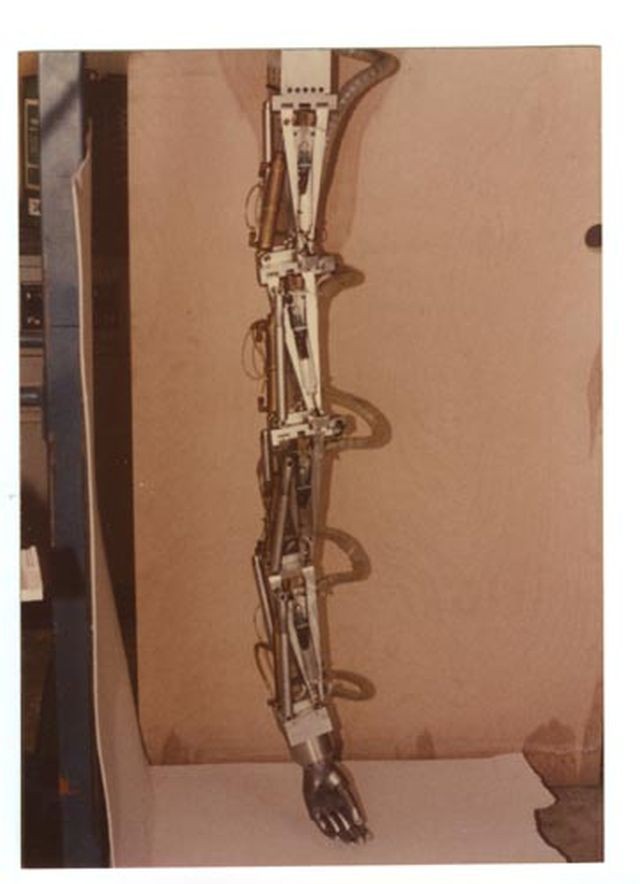
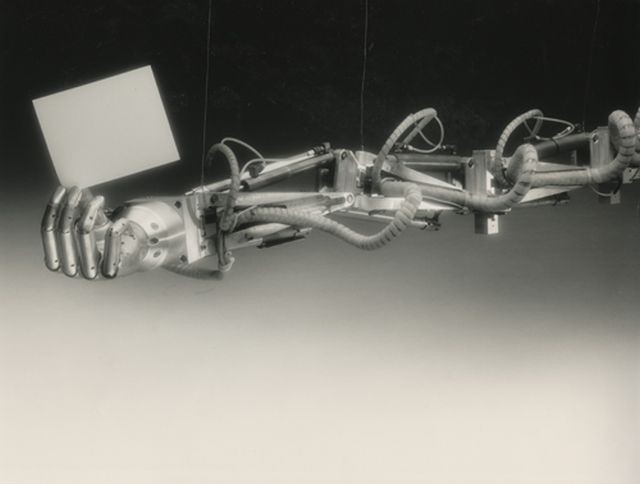
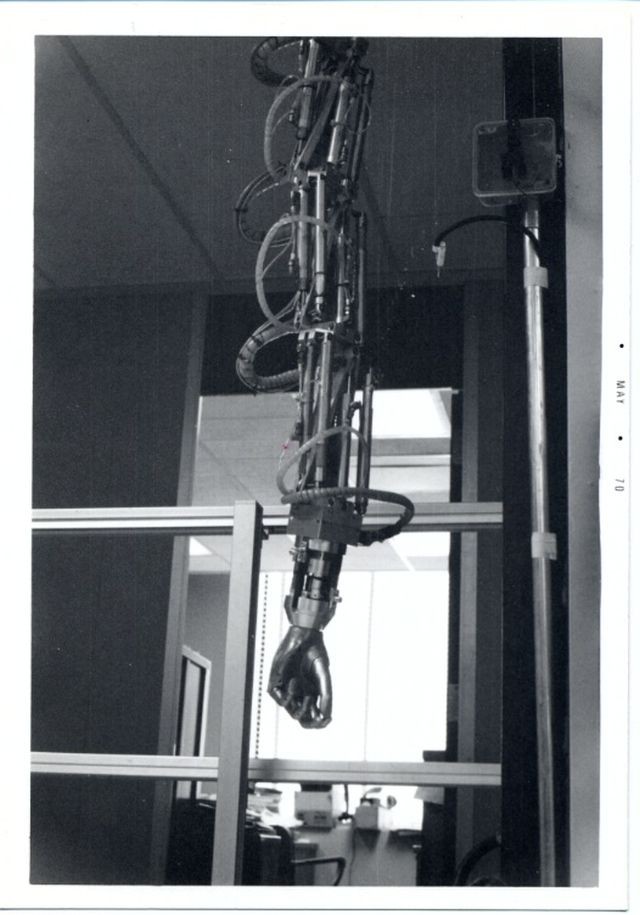
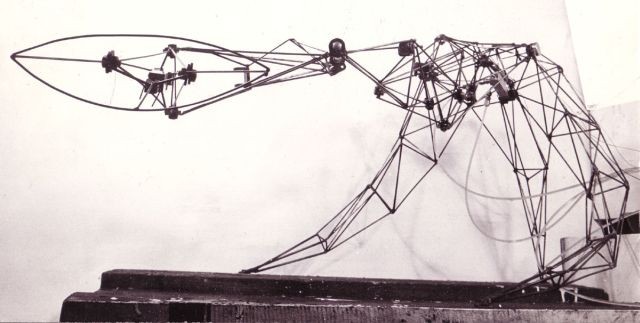
B&W, robotic arm holding a blank white card, gradient background, black top to white bottom, 3 joints plus hand. Photo back, light pencil entry, middle left, vertically, "Minsky", "Tentacle Arm", "P4595"

"This arm was developed by Marvin Minsky at MIT in 1968. Since it moved like an octopus, this early robot arm was called the Tentacle Arm. It had twelve joints and was designed to reach around obstacles. The arm was controlled by a PDP-6 computer and was powered by hydraulic fluids. It was designed to be mounted on a wall and could lift the weight of a person."

Minsky Arm at M.I.T. Museum
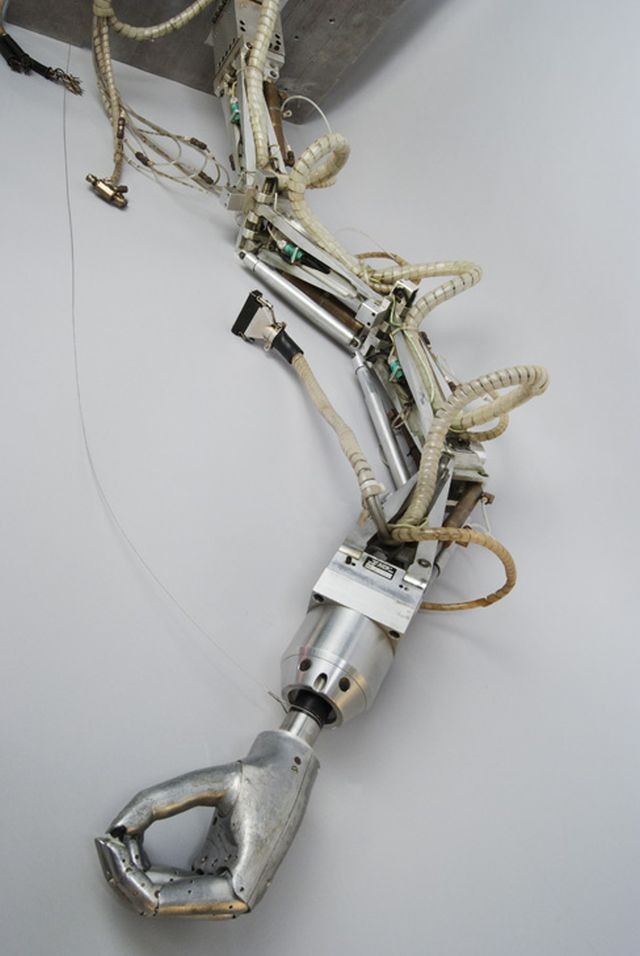

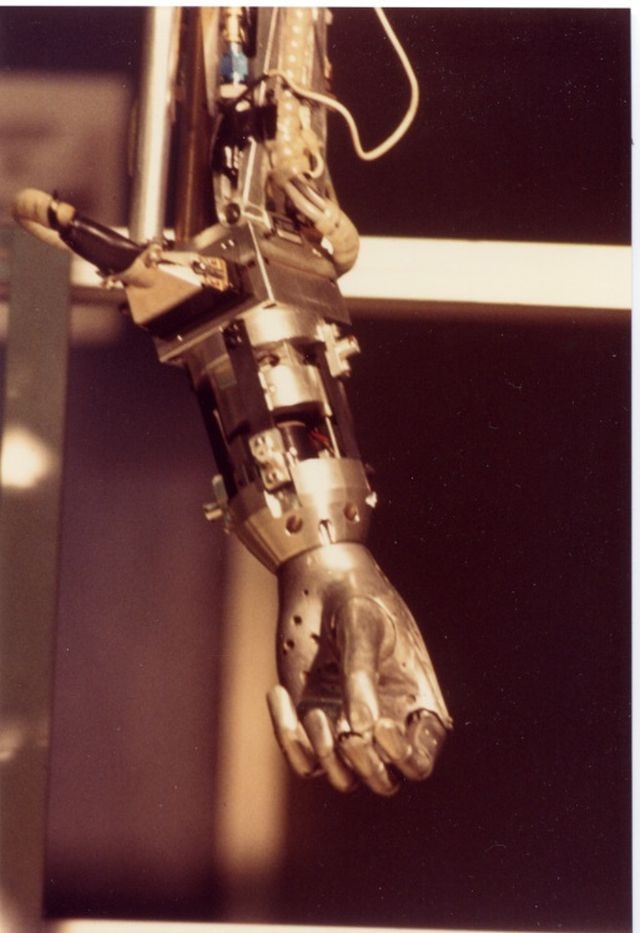
The Minsky Arm is now in the M.I.T. Museum with a Tomovic Hand attached.
Another robot arm based on a lobster's claw.
Edward Ihnatowicz (1926-1988) built one of the world's first computer-controlled robotic sculptures, The Senster, between 1968-70. It is…
…about 15 feet long by 8 feet high, the Senster consists of six independent electro-hydraulic servo-systems based on the articulation of a lobster's claw. Crustaceans move by means of hinges, whereas most animals move by pivots, which are more difficult to reproduce in engineering[1].
1. Senster in "Science and Technology in Art Today" by Jonathan Benthall, Thames and Hudson, London 1972
See other early Underwater Robots here.