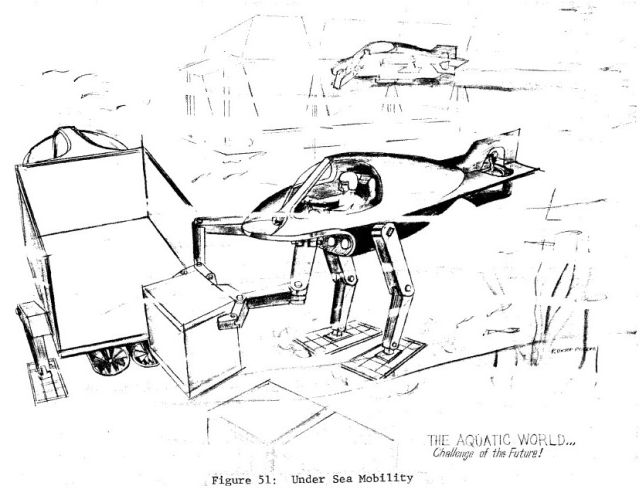
Underwater Army Bases and Depot (See Figure 51: Under Sea Mobility)
Recent marine biology and ocean engineering work have resulted in some startling underwater activity concepts and systems designs that promise to pave the way to a profitable exploitation of untapped water resources. It is not difficult to argue that before this decade has passed the Army, as well as the Navy, will be involved in exploiting and protecting our underwater territory.
Already, large oil companies are competing for underwater rights for oil well operations. The United States government is the guardian of this territory and has the specific operational guidelines. Petroleum industries are currently designing huge and complex underwater oil mining operations. The author predicts that some day in the near future they will operate their own underwater stations. There are obvious advantages to this foray into our underwater territory.
The petroleum industries have found that to operate these underwater complexes they need transportation and mobility. They have design vehicles that travel from the surface down to the site and are able to do work by means of underwater manipulators. It follows that a necessary and valuable tool for underwater work will be unusual vehicles that can provide the ability for man to work remotely as he would on earth directly. The illustration in Figure 51 of this unusual underwater vehicle is a concept that might not ever be realized. However, it is predicted that the elements of this concept, the legs, and the manipulator arms, and the man's ability to operate the vehicle from within, are concepts that will be used to provide the kind of functions illustrated.
From: Technical Report Number 11768, Applying Force Feedback Servomechanism Technology To Mobility Platforms, Ralph Mosher, 1973.
The earlier G.E. Pedipulator concept dates back to 1962-64.
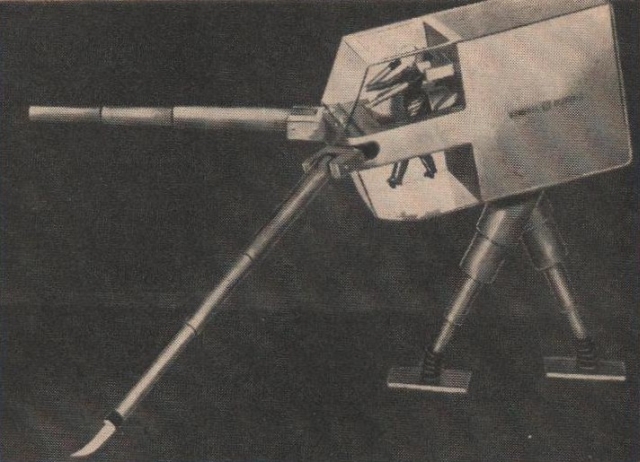
Land-based concepts done 1962, test Pedipulator demonstrated in 1964. It was never completed as a proposal for a more useful quadruped was put forward and accepted (see here ).
See other early Underwater Robots here.
See other G.E. CAMS here:
 1956- GE Yes Man
1956- GE Yes Man 1958-9- GE Handyman – Ralph Mosher
1958-9- GE Handyman – Ralph Mosher 1969 – GE Walking Truck – Ralph Mosher
1969 – GE Walking Truck – Ralph Mosher 1965-71- GE Hardiman I
1965-71- GE Hardiman I 1969- GE Man-Mate Industrial manipulator
1969- GE Man-Mate Industrial manipulator