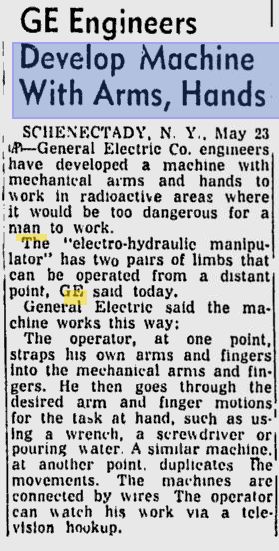
Life Magazine 28 May 1956 p 125.
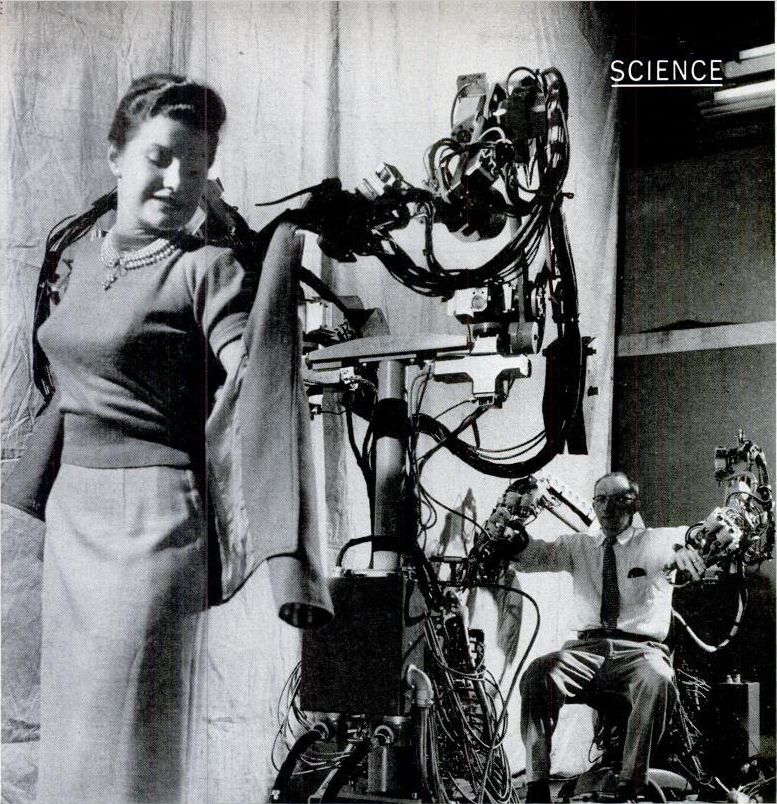
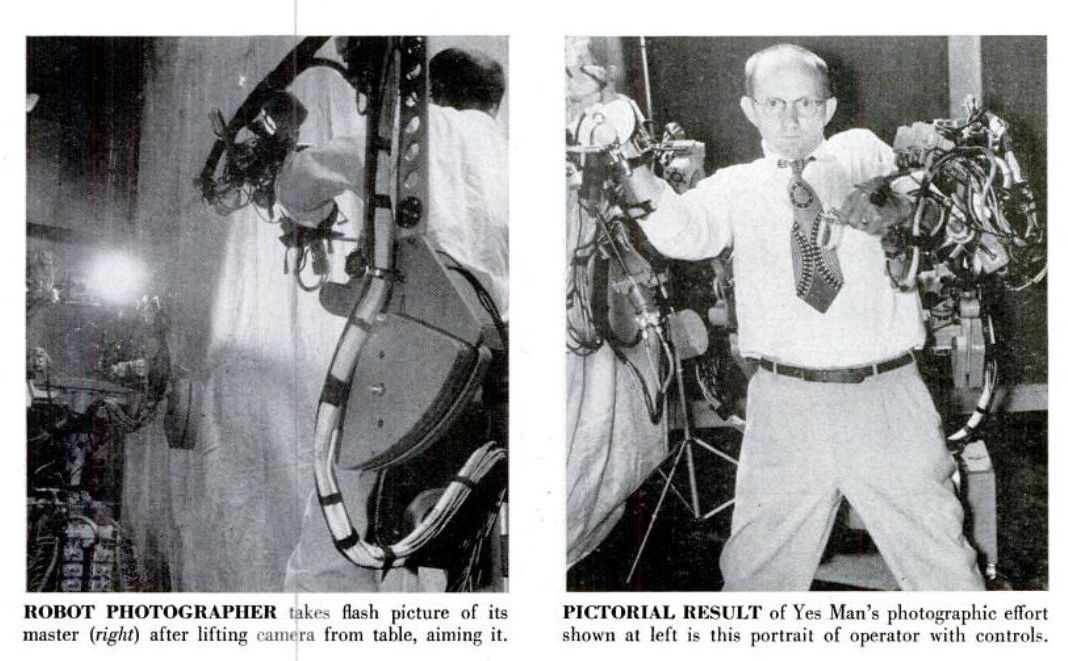
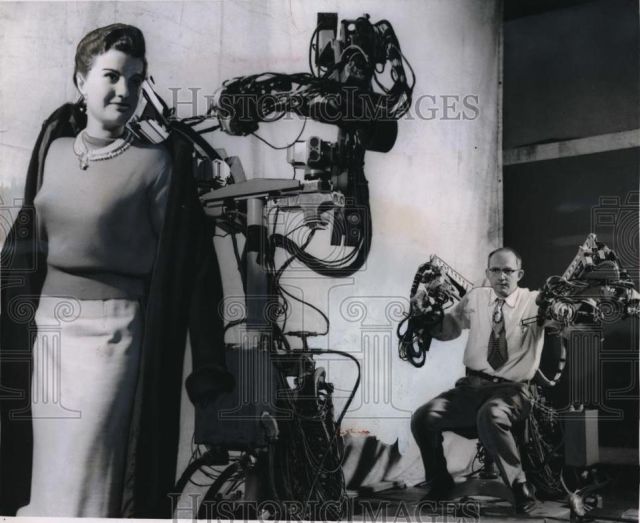
The disembodied device graciously helping the girl with her coat (above) is one of the most dexterous robots yet designed. Its arms have elbows that bend, wrists that swivel and three-clawed hands. Still being perfected by G.E., it is an electro-mechanical slave called the Yes Man which does the bidding of a human master who acts out the desired motions in pantomine. Attached in the master's hands are a pair of arms matching the robots. When the man moves his fingers, electric signals activate hydraulic pistons which move the Yes Man's claws the same way. Through a feedback system, the operator can feel what the robot is doing. Yes Man has a serious purpose. By watching it through TV, a technician sitting some distance away could safely guide the Yes Man through intricate tasks in an atomic laboratory.
The above article from "The Herald Journal", 24 May 1956.
News Bureau (NAB)
GENERAL ELECTRIC COMPANY
Schenectady 5, N. Y.
FOR RELEASE AFTER 7 P.M., EDT, WEDNESDAY, MAY 23, 1956
CHIVALRY BY REMOTE CONTROL
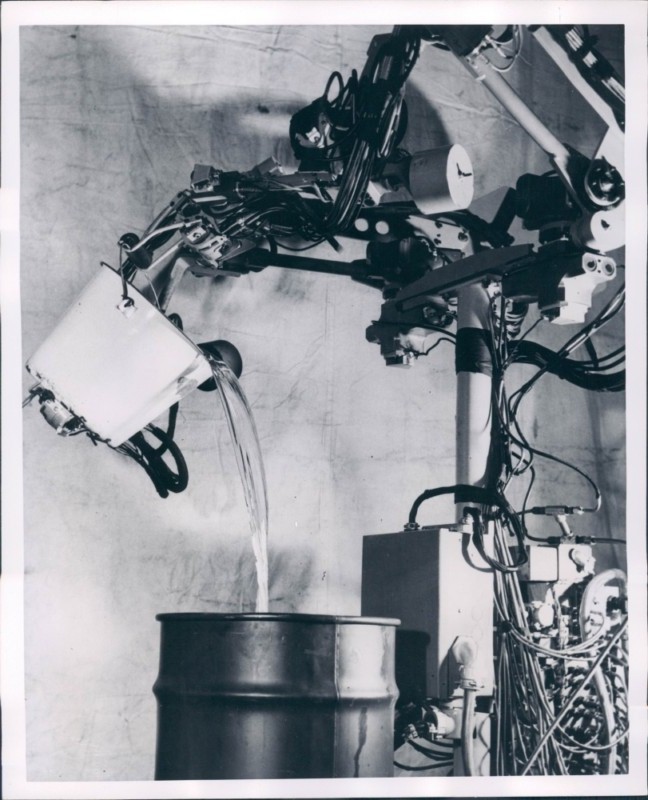
SCHENECTADY, N. Y. — "Yes-Man," the most dexterous mechanical slave ever developed, helps pretty Ruth Feldheim into her coat during a demonstration at General Electric's General Engineering Laboratory. As Ralph Mosher, a G. E. engineer operating the "master," goes through the motions of helping Ruth into her coat, some distance away, the "slave" does the real job deftly and politely. The master-slave manipulator, designed to perform mechanical tasks in hazardous radioactive areas, is the strongest and most dexterous yet developed. It was built in the engineering laboratory for G. E.'s Aircraft Nuclear Propulsion Department under an Air Force contract.
The above GE press photo says that Ralph Mosher is responsible for this machine. See below for other, similar machines by GE and Ralph Mosher.
I have very little information on this teleoperator. From what I have found, only the Goertz manipulators were earlier with force-feedback.
See other GE CAMS here:
") 1958-9- GE Handyman – Ralph Mosher
1958-9- GE Handyman – Ralph Mosher") 1962 – GE Pedipulator – Ralph Mosher
1962 – GE Pedipulator – Ralph Mosher") 1969 – GE Walking Truck – Ralph Mosher
1969 – GE Walking Truck – Ralph Mosher") 1965-71- GE Hardiman I
1965-71- GE Hardiman I") 1969- GE Man-Mate Industrial manipulator
1969- GE Man-Mate Industrial manipulatorSee other early Teleoperators, Exoskeletons and Industrial Robots here.
Before 1970 GE had built a long line of direct/mechanical and electrohydraulic small-task manipulators for use in nuclear and hazardous laboratory environments. The mechanical ones were connected by a series of push-pull cables for each movement. Very useful but only work up to 20 ft. The newer ones could operate any safe distance from the task, connected by electric cables and with a local hydraulic power supply. I had the great pleasure and fascination watching Ralph at the control console with a TV screen, with the big GE-marked machine behind him, giving himself a haircut. Electronic force feedback made it work. It was only a tiny step to the Hardiman.
Hi Despina,
Thanks for your feedback! Personally, I believe that Goertz did not build GE’s Yes-Man. More likely the arm bought by GE , assuming it was the force-feedback model, could have been reverse engineered and the design concepts incorporated into Yes-Man.
Unfortunately I haven’t yet completed my post on Goertz’s manipulator as intended.
Regards,
Reuben Hoggett.
Great site, I thought this may help about your comment above on the Goertz manipulators: it looks like the GE YES MAN manipulator was made by Goertz, as mentioned in this historical website
http://www.centres.com/nuclear/manip/maniphis.htm
Look at the note about their production:
During the time period from 1951 through 1954, CRL manufactured and delivered 74 sets of MSM’s. These manipulators were Model 4, 6B and 7 types. Some of the notable customers were:
* Oak Ridge National Laboratory
* E.I. du Pont de Nemours & Co.
* Carbide & Carbon Chemical Co.
* General Electric Co.
* Argonne National Laboratory
* Nissho Co. Ltd., Japan