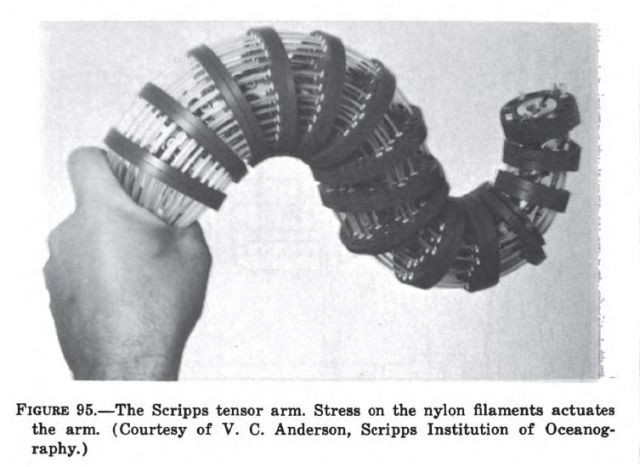
FIGURE 95.—The Scripps tensor arm. Stress on the nylon filaments actuates the arm. (Courtesy of V. C. Anderson, Scripps Institution of Oceanography.)
The "tensor arm," conceived by Victor Anderson, at the Marine Physical Laboratory (MPL) of the Scripps Institute of Oceanography, has 16 degrees of freedom (fig. 95). The entire arm is hydraulically actuated by nylon "tendons" strung along the exterior of the arm rather than by actuators placed at each joint. A pull on one side that is not compensated by an equal pull on the other side causes the whole arm to bend in a way similar to the muscle-tendon action in the human arm, except, of course, that the tensor arm possesses two unrestricted degrees of freedom at each joint. Sensor tendons parallel the actuator tendons and give the operator position feedback. The MPL tensor arm, also called Benthic Manipulator II, can operate directly in seawater and is intended for use in the MPL Benthic Laboratory "hive" for replacing electronics cards, wrapping terminals, and so on. In contrast to some of the more massive underwater manipulators just described, the tensor arm is only about 15 inches long. The novel actuation scheme is potentially very important in teleoperator design.
See more on the Benthic Laboratory here.
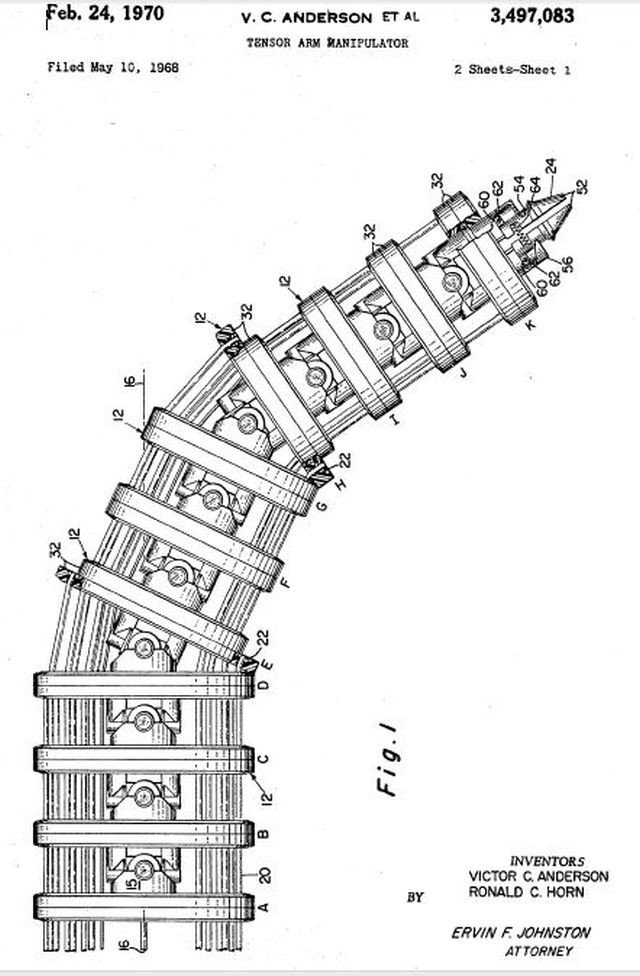
Tensor arm manipulator
Publication number US3497083 A
Publication date 24 Feb 1970
Filing date 10 May 1968
Inventors Anderson Victor C, Horn Ronald C
Original Assignee US Navy
ABSTRACT OF THE DISCLOSURE The description discloses a tensor arm manipulator which includes a series of plates which are interconnected by universal joints for pivotable action with respect to one another. The plates have a plurality of aligned apertures through which extend a plurality of tendons which are connected at one set of ends to selected plates. Accordingly, upon pulling the opposite set of ends of the tendons the plates can be pivoted to various positions to perform work functions.
The invention described herein may be manufactured and used by or for the Government of the United States of America for governmental purposes without the payment of any royalties thereon or therefor.
The Navy's man-in-the-sea program has become a reality with the Sealab I and Sealab II projects. These projects have been primarily directed toward testing the capability of man to work on the continental shelf areas of the oceans. The average depth of the continental shelves is approximately 600 feet which is only a small fraction of the average depth of the oceans, which is approximately 12,000 feet. Accordingly, a detailed study of the deep ocean areas must be carried on by man in a high pressure diving hull or with bottom located equipment and instrumentation which can collect data either automatically or by remote control operation.
One approach for prolonged study of the ocean bottom has been the Benthic Laboratory. This laboratory, which was used in support of the Sealab II project in 1965, is a bottom located inverted dome which is filled with kerosene and has along its inner periphery a series of plug-in electronic modules. These plug-in modules provide the circuitry for the collection and dissemination of ocean bottom data. It is envisioned that the Benthic Laboratory will become a permanent fixture on the deep ocean floor and that various remotely controlled bottom vehicles, which are controlled by the laboratory, will collect ocean data such as core samples, TV viewing, and temperature and current data.
It is necessary in the Benthic Laboratory to occasionally reposition TV cameras, operate switches, mate connectors, and remove and replace modules. Because of the permanency of the Benthic Laboratory on the ocean floor and its operation without the aid of man in attendance thereof, it has become necessary to provide a manipulator substitute for mans arms to perform the necessary work functions. The present invention provides such an arm substitute which will enable remote functions as described above. The present manipulator includes a series of plates which are interconnected by universal joints for pivotable action with respect to one another. Each of the plates has a plurality of apertures. Extending through these apertures is a plurality of tendons which are connected at one set of ends to selected plates. Accordingly, upon selectively pulling opposite ends of the tendons the plates can be pivoted to desired positions resulting in a snake-like movement of the entire arm assembly. One end of the manipulator may be provided with fingers or a tool which may also be operated by the tendons. The tendons may be selectively pulled by means including a computer which is programmed to perform work functions of the arm and fingers to achieve desired work functions.
An object of the present invention is to provide a manipulator which has dexterity similar to the human arm.
Another object is to provide an arm manipulator which can be positioned in six spatial coordinates by simply selectively tensing a series of tendons.
See other Victor C. Anderson manipulator articles here.
See other early Underwater Robots here.