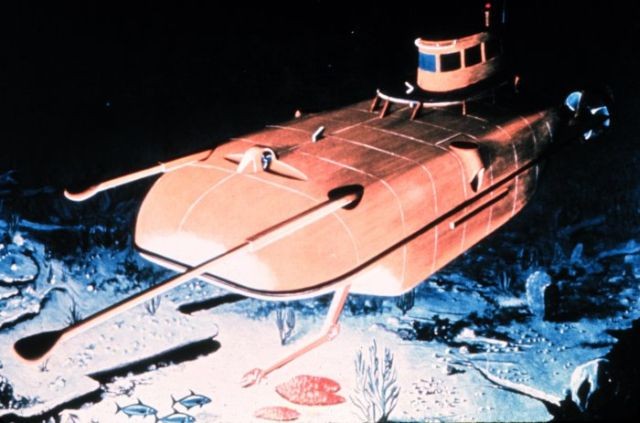
1968-69 – Deepstar 2000 Diving Saucer by Westinghouse.

The manipulator arm is simple as per all Cousteau/Westinghouse submersibles of this period with only two degrees of freedom. The arm is electro-hydraulic and the claw is of the clam-shell type, also referred to as an "orange peel" claw. Arm is also mechanically jettisonable for safety reasons.
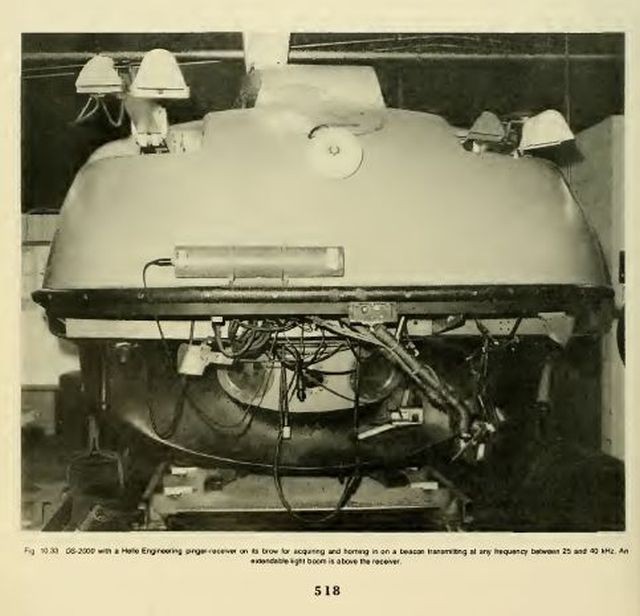

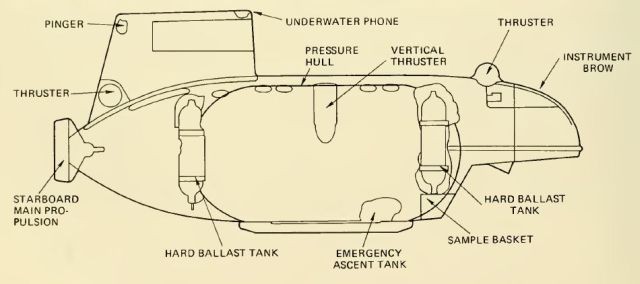

1968-69 – Deepstar 2000 Diving Saucer by Westinghouse.
See Cousteau's earlier SP-350 here and Deepstar 4000 here.
See other early Underwater Robots here.