Publication number US3381485
Publication date 7 May 1968
Filing date 23 Oct 1965
Inventors RALPH KENT CROOKS, JAMES M. HARDENBROOK, RICHARD D. LEIS, JAMES C. SWAIN and DAVID L. THOMAS
Original Assignee Battelle Development Corp
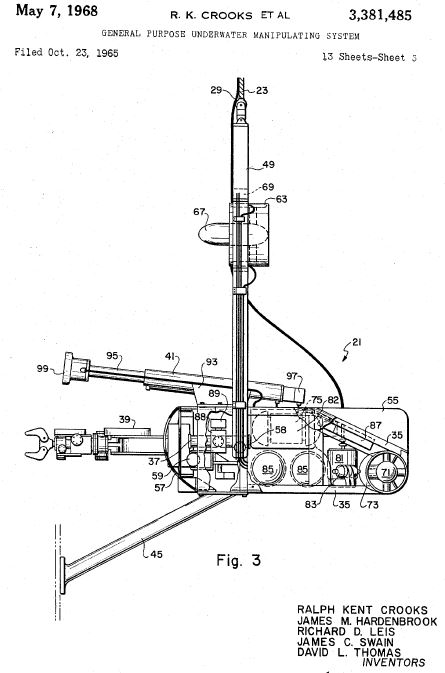
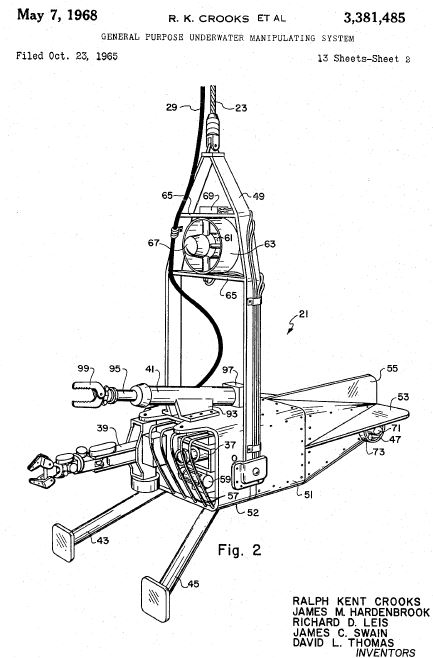
General purpose underwater manipulating system
ABSTRACT OF THE DISCLOSURE A cable-suspended, remote-controlled manipulating device for operation underwater. The apparatus includes propulsion means, TV camera, clamping devices, manipulating arm, support feet and other devices necessary to underwater operation. Numerous components of the apparatus are preferably hydraulically actuated by a system, having a plurality of capacity or power levels. Various sensor devices are included to obtain information about underwater environment and to inform the above-water operator of the condition and activity of the apparatus. The apparatus is constructed in modules to facilitate re placement and substitution of various working devices. The command system of the device includes partial multiplexing where signals are originated by an operator and released to the underwater apparatus on a priority system with lag time within the area of human reaction time. Sensor signals and command signals are sent along common channels.
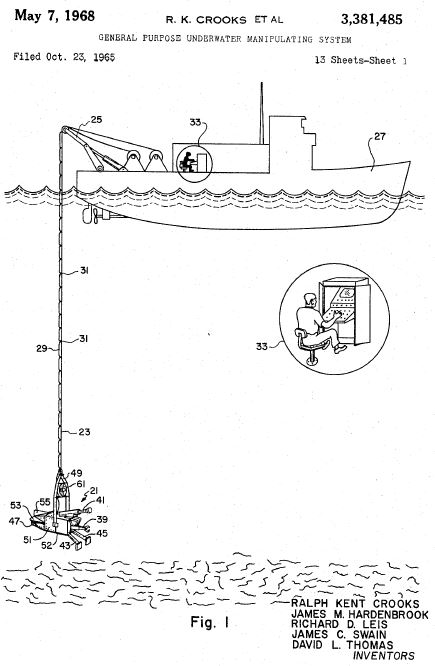
This invention relates to apparatus for underwater exploration, research, and remote controlled manipulation of various devices and tools. More particularly, it concerns a fully controlled, uninhabited apparatus provided with television and operated by a cornmand station that is preferably situated on a craft above water.
Much of the Worlds wealth and resources lie on or beneath the floor of the ocean. Under present engineering capabilities, these resources are largely inaccessible. Interest is developing, and some experiments have been conducted, in mining, farming the ocean floor, and under sea dwellings; also, there has been very active development of off-shore oil reserves throughout the world. Under to 300 fathoms of ocean water lie broad continental shelves which in themselves constitute nearly fifteen percent of the earths total surface. When these continental shelves come within the reach of man, the total area that mankind can utilize for its benefit will more than double. High pressure, the corrosive nature of sea water, and many other factors combine to make the ocean a hostile environment in which man has, to date, operated only in a limited way.
In the past, deep-sea exploration and research has been limited by mans inability to reach deep enough into the ocean and remain there long enough to accomplish given tasks. Two principal concepts of deep-sea penetration are: (1) attempts to put man deep into the ocean by scuba apparatus, hard helmets or aboard submersibles, and (2) unmanned dredges and trawls or programmed machine systems.
Recently, especially with development of improved television devices, interest has increased in remote controlled manipulators. Considerable success is being achieved in increasing the economic productivity of divers at depths exceeding 100 feet or so; nevertheless, an expanding need for remote controlled equipment to complement or supplement the work of divers is still needed. The apparatus of this invention is intended for use in the growing underwater science, to increase the knowledge in that science and for application in present common underwater operations such as general underwater observations, search, repair, salvage and other tasks requiring manipulatory functions.
A variety of remote controlled craft have been proposed and a smaller number built. In general, these have been very complex in structure but limited in function. The present invention is directed to the need for a structurally simple, but reasonably versatile, device that can operate at continental shelf depths, and deeper, and perform a variety of manual tasks. To accomplish this, a vehicle suspended by a cable from a floating vessel is preferred since cable suspension eliminates a number of complex problems inherent in a freely swimming vehicle.
Conventional remote-controlled underwater craft have usually emphasized certain functions while neglecting others. Most conventional devices have been impractical in the area of ability to orient and maintain orientation of the device with respect to tasks to be performed. Other conventional devices provide great mobility with seemingly ample controls but neglect to consider cable requirements for the large number of communication lines involved. In order to operate at increased depths, the suspension and control cables must be kept to a minimum size; otherwise, the cable weight becomes a problem, and, if the command craft is towing the underwater craft or, if the underwater craft is exposed to significant currents, cable drag becomes a prohibiting factor as depth increases.
It is accordingly an object of this invention to provide a cable suspended general purpose underwater manipulating system capable of being towed and capable of maneuvering without towing.
Another object of this invention is to provide apparatus that approaches human dexterity in manipulation while underwater and in many instances surpassing human capabilities underwater.
Another object of this invention is to provide a control system that provides communication to and from the underwater craft with a balance between the number of communication channels and the complexity of the electronic circuitry.
A further object of this invention is to provide an underwater craft that can attach itself to underwater objects and also maneuver without requiring forward motion of the craft to perform operations on objects where attachment to the underwater object is impractical.
A still further object of this invention is to provide an apparatus that requires a minimum amount of sealing from the pressure and corrosive effects of sea water.
Another object of this invention is to provide a manipulating arm so proportioned as to maximize the volume in which it can approach objects from several angles.
A further object of this invention is to provide means for moving the manipulatory elements that substantially maintain the elements in selected or set positions without the use of complicated feedback or servomechanisms.
A further object of this invention is to provide a system capable of using tools; sufficient versatility in the manipulating arm, and capacity in the command system to permit the efficient use of tools are provided without excessive weight or complexity.
A still further object of this invention is to provide, in part, a modular arrangement whereby modules may be quickly replaced or modules having varied functions may be substituted.
Still another object of this invention is to provide a propulsion means with particular attention to form,
mounting, and location so as to be ideally suited for a cable suspended craft and especially useful for the varied functions the craft is intended to perform.
Still another object of this invention is to provide an apparatus having holding and support means for attaching to and stabilizing on a work piece or work area for operation either in a horizontal or vertical position.
Another object of this invention is to provide a source of power that supplies energy to various elements at different energy levels providing for both fast-slow speed and high-low power operations.
See other early Underwater Robots here.