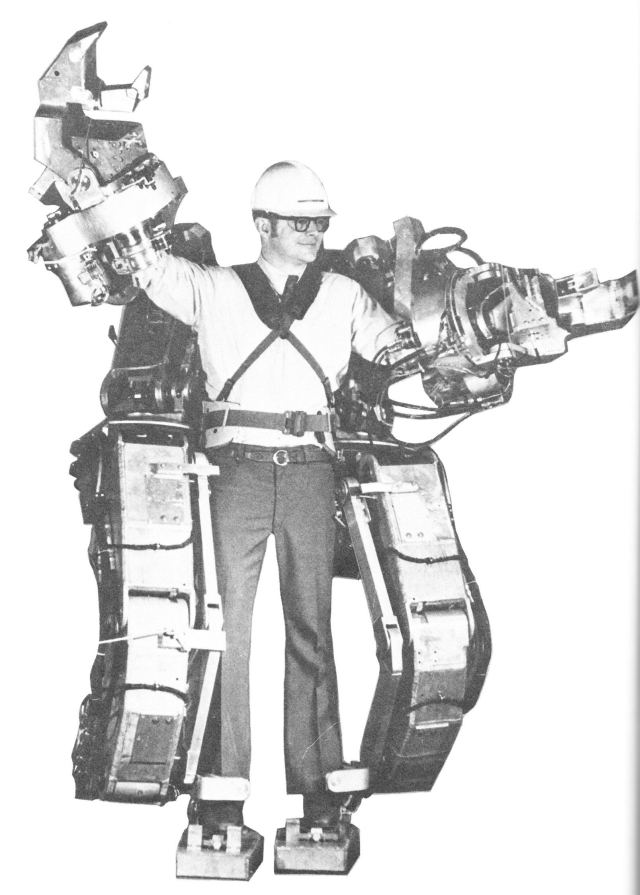
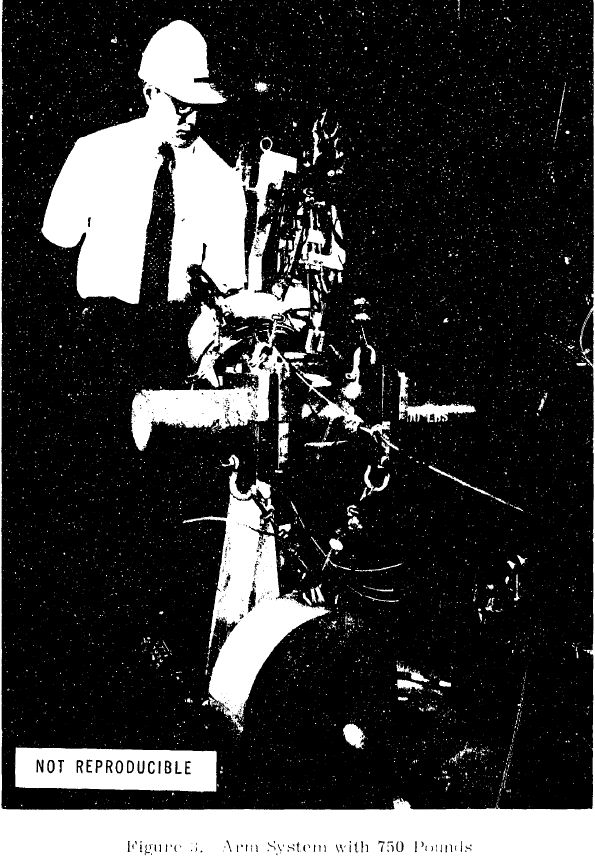
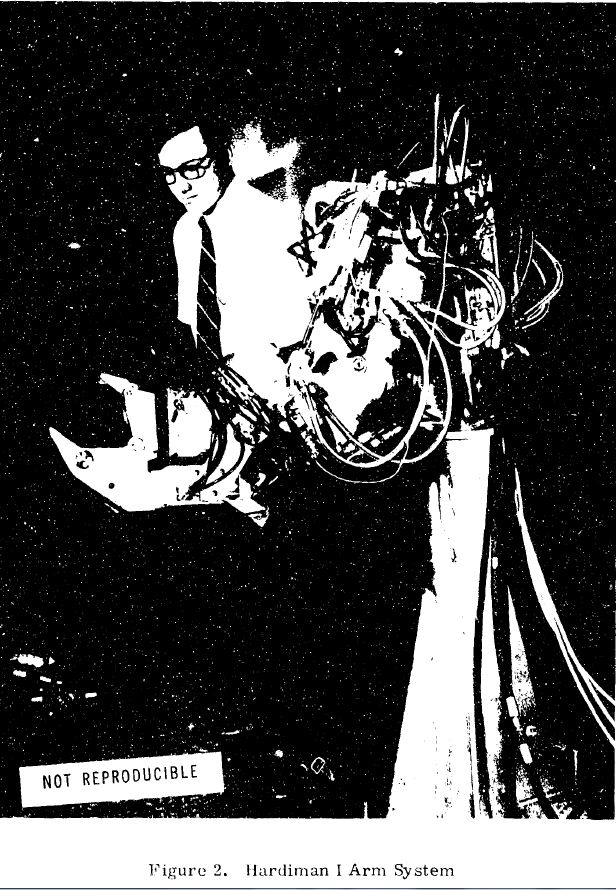
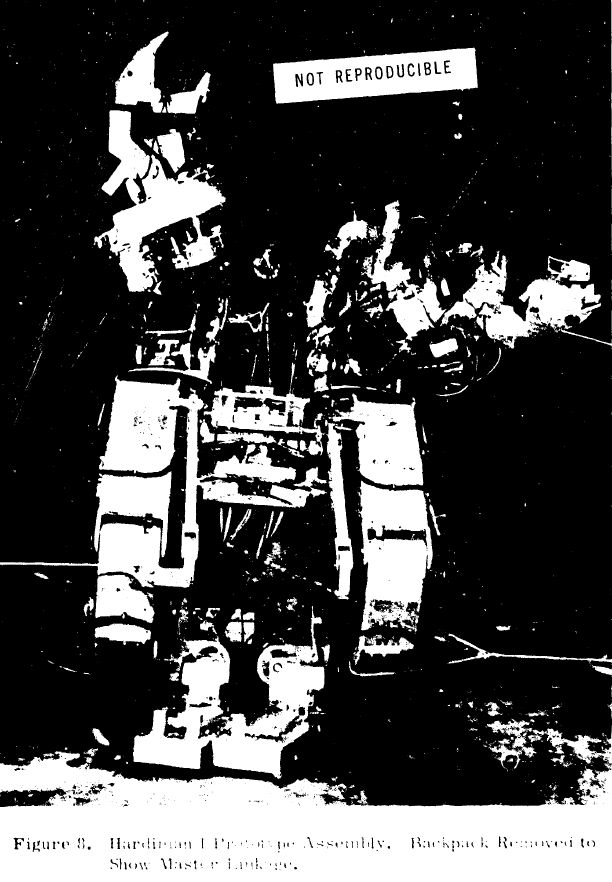
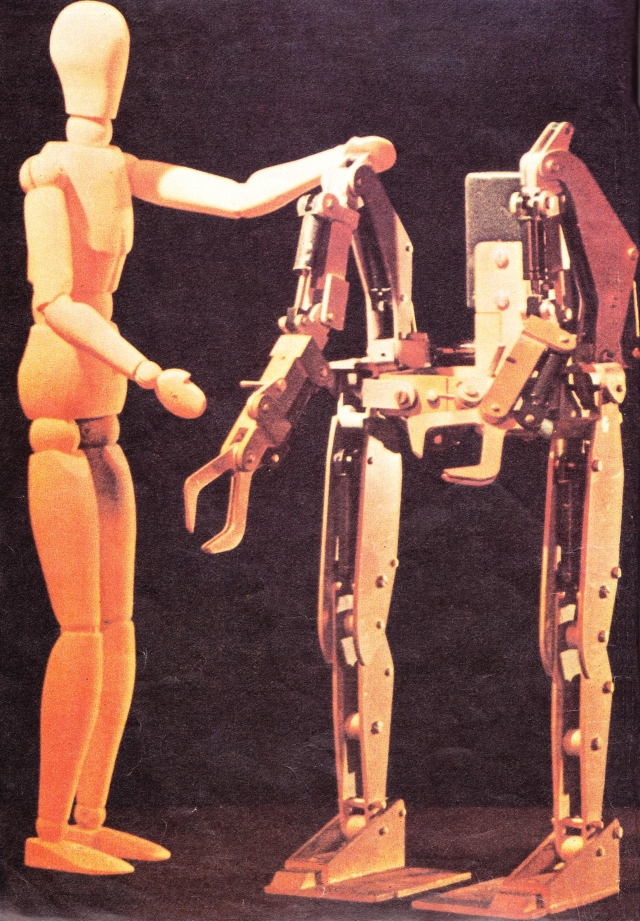
One of the few photographs we see of Hardiman I. I’d have a smile like that on my face too if I had one of these.

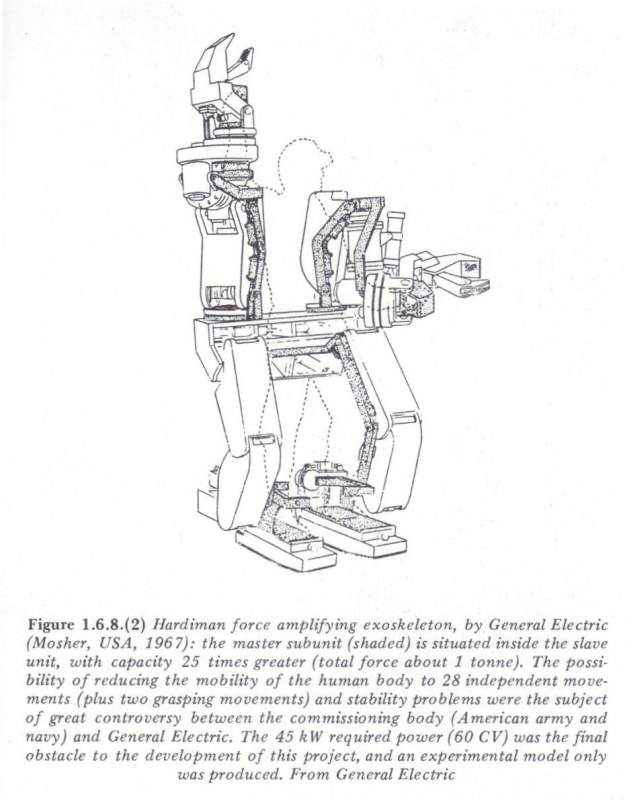
Hardiman is a name derived somehow, from “Human Augmentation Research and Development Investigation.” and Man from MANipulator. Sometimes written as HardiMan, Hardi-Man, Hardi Man, Hardiman I. Said to also be officially called the “Powered Exo-skeleton.”

Above image from the Museum of Innovation and Science via aivanet.
Note: some reports suggest that only one arm of Hardiman’s was built. The above photo usually accompanies that comment, but it is incorrect. A complete Hardiman was built with both arms, but the comment refers to the earlier tests of just the single, upper manipulator. Later, even when the full machine was built,  one side was made static, and the other side was capable  moving.
Reanimated gif by Kevin Weir at flux machine.
The Hardiman program from 1965-1971
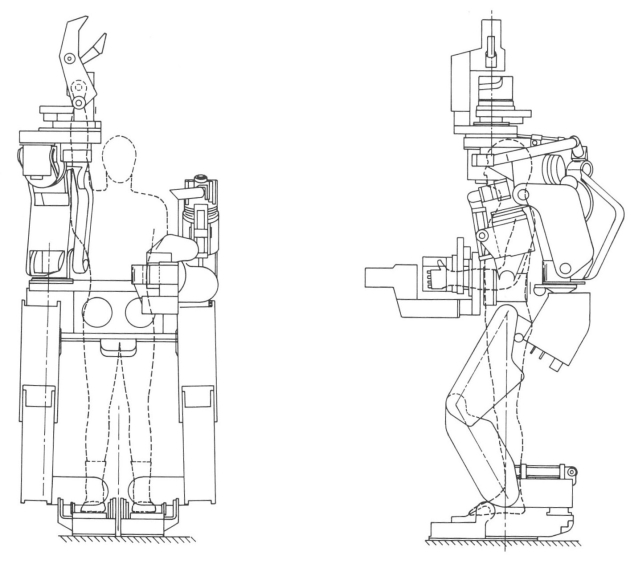
The Hardiman stated in November 1965. The early phases were on human factors and kinematic concepts, which were completed in 1966. The results of this required changes, where the original concept was for a single master-slave system, now to be split in two, the upper arms, and the lower legs.
By the end of 1967, the slave prototype had been built following load-bearing joint tests.
There were technological problems with the hydromechanical servos, mainly around their stability. An interim study was put together and concluded by April 1968. The solution was to go to electrohydraulic servos.
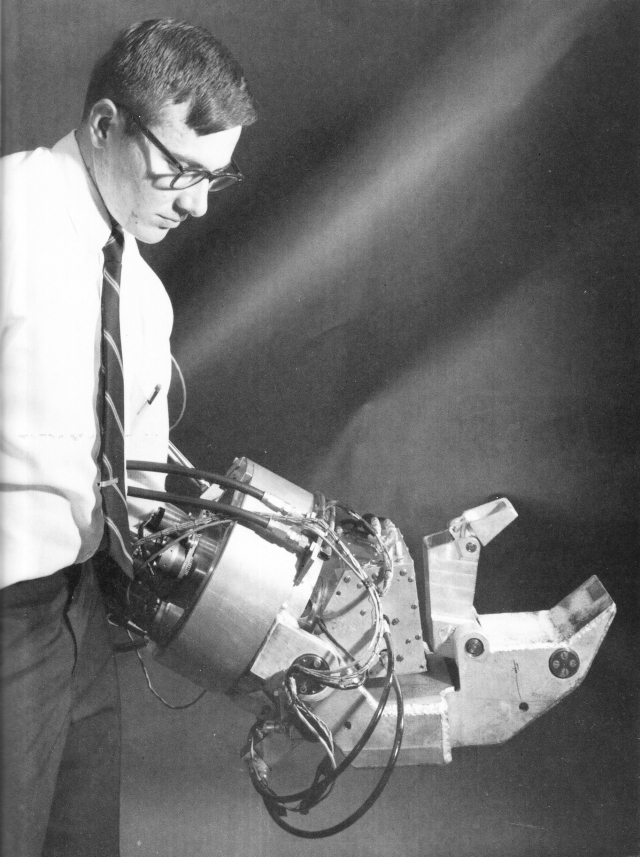
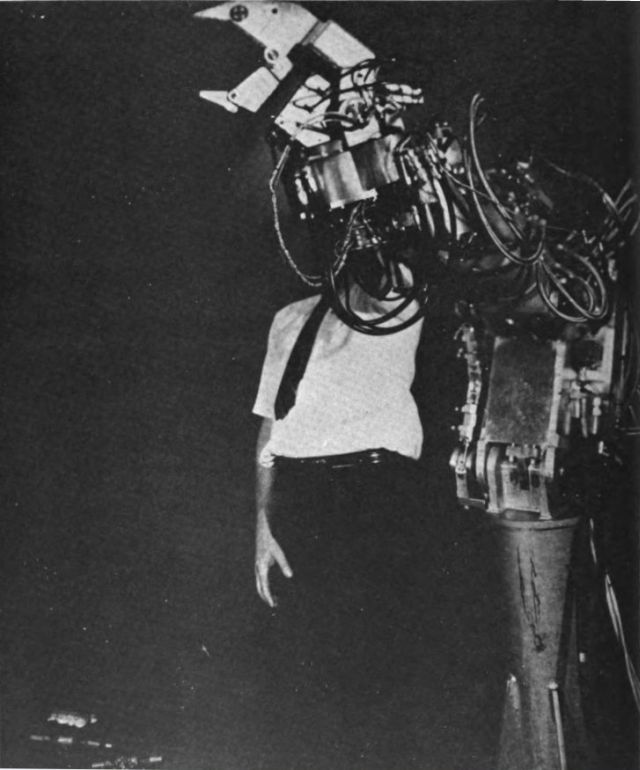
Although the plan was to build the legs first, this setback meant that the ONR directed the program to complete the arm system. By the end of 1969, the single arm tests were completed.
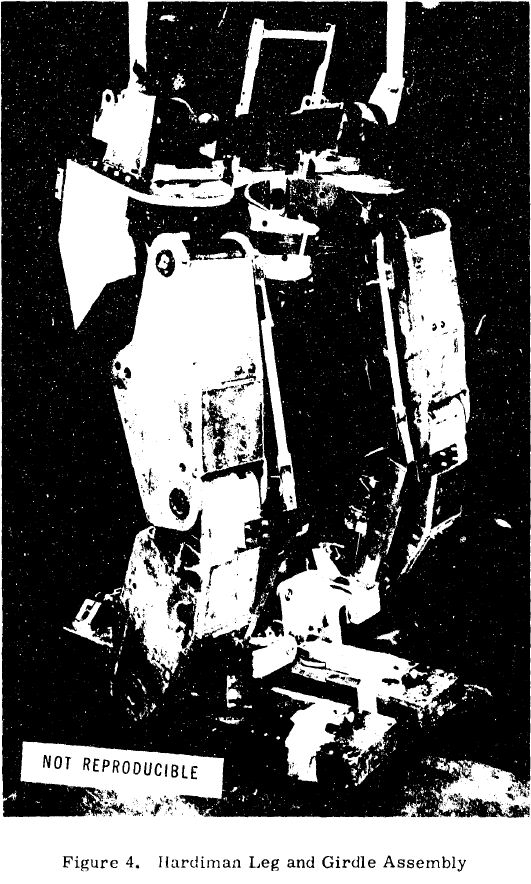
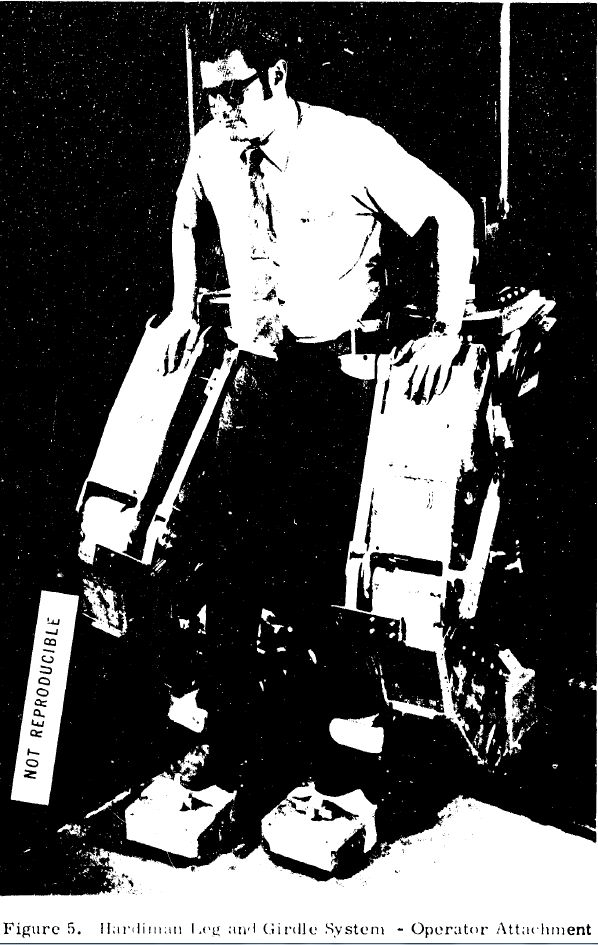
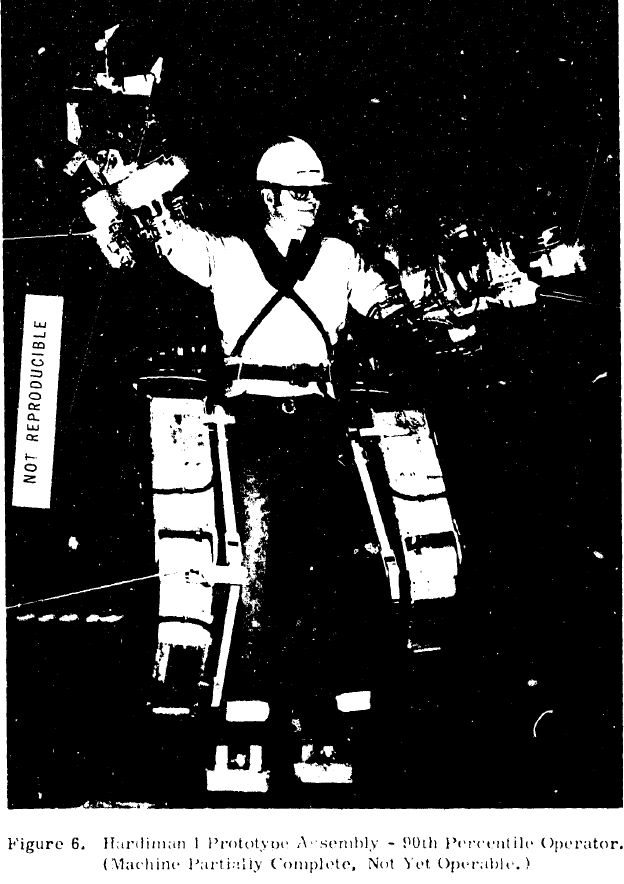
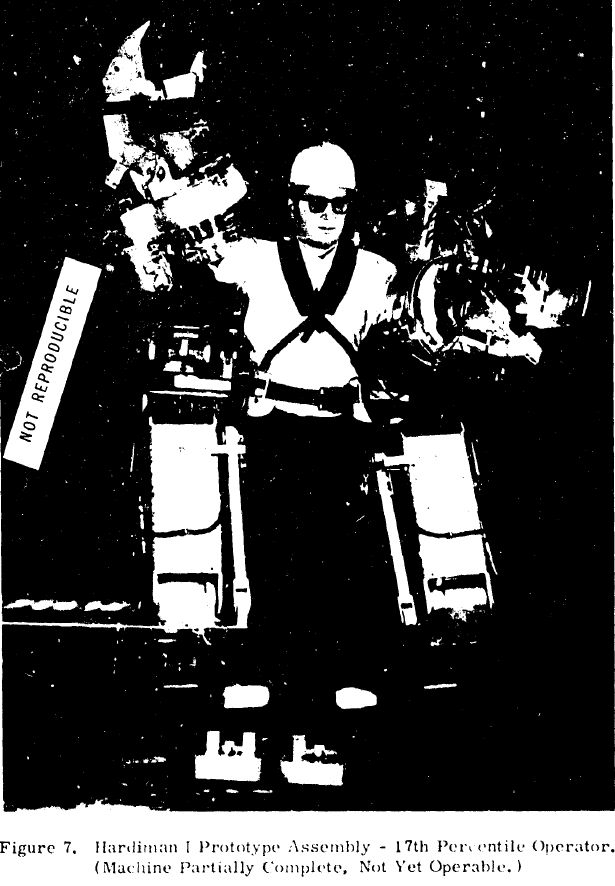
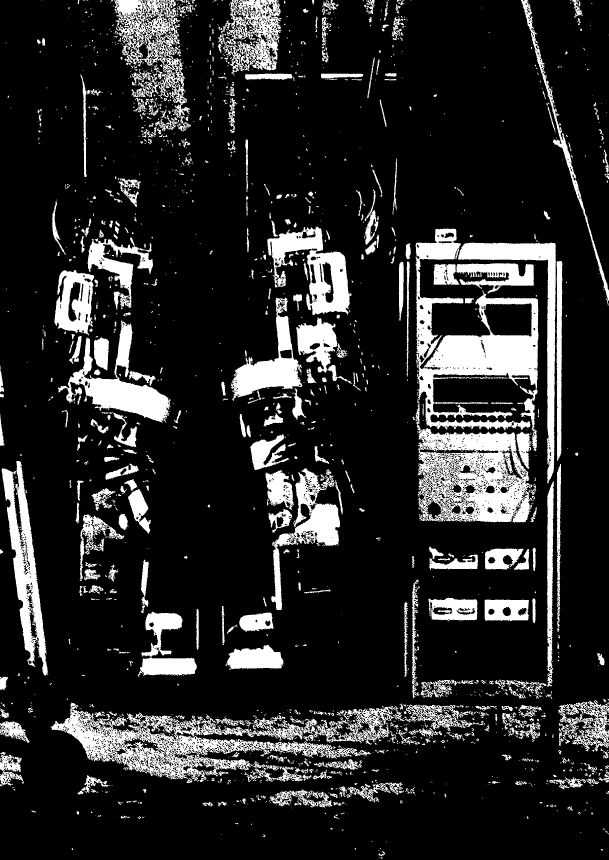
The leg and girdle systems were completed late 1970, but was not able to balance or walk without support. Major kinematic problems were arising and could not be overcome within the program’s timeframe. The approach was taken to fasten the master leg to the slave at the girdle. This change the operating mode from “operator walk” to “operator ride”.
Within these constraints and the assistance of a supporting tether it was possible to demonstrate a limited ambulatory capability with the leg system. A movie was made of this {RH:where is it now?].
See the May1971 report pdf here: 
See the full 1971 final report pdf here:
See other pdfs from original source here.

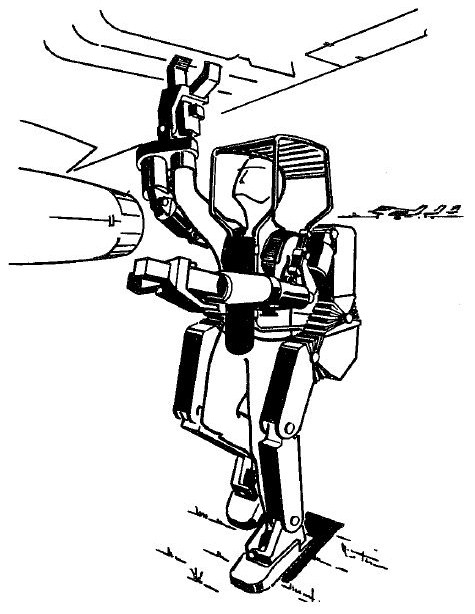
Above: concept drawing showing the loading of bombs into an aircraft.
The above words say it all.

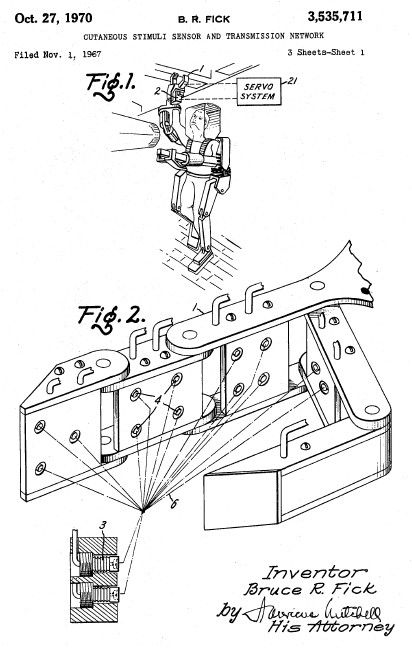
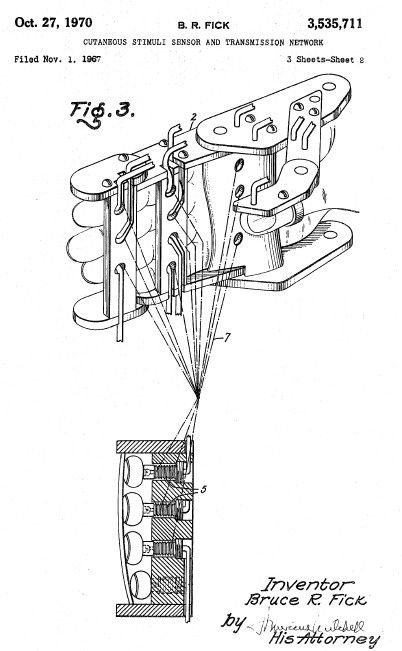
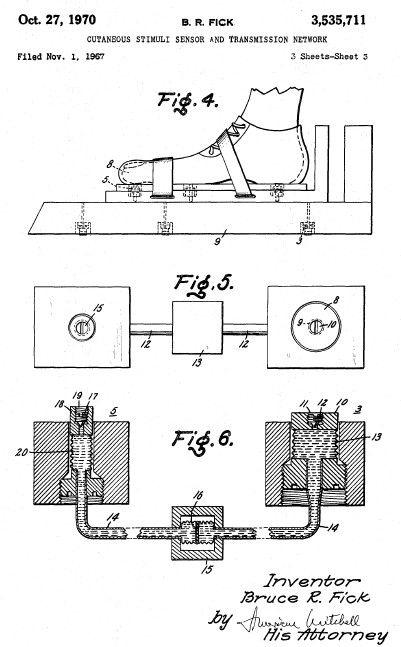
CUTANEOUS STIMULI SENSOR AND TRANSMISSION NETWORK by Bruce R. Fick et al
See full patent here.
Patent number: 3535711
Filing date: Nov 1, 1967
Issue date: Oct 27, 1970
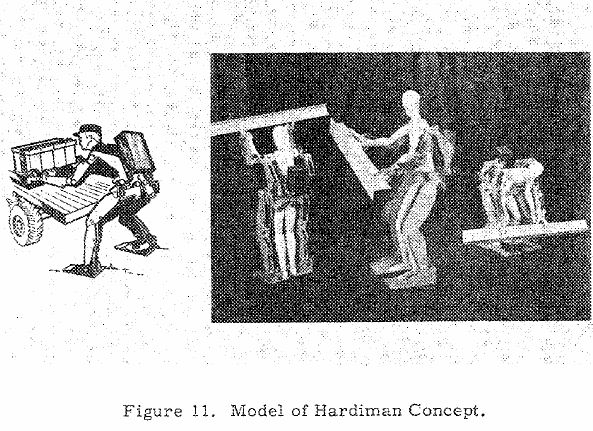
Early scale concept models of Hardiman.
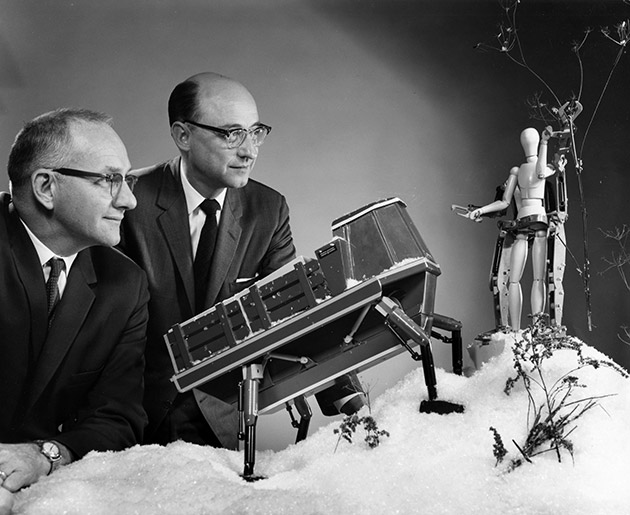
Ralph Mosher (at the rear) and Art Bueche (to the left of the photo) with models of the Walking Truck and Hardiman.
Above image from the Museum of Innovation and Science via aivanet.
-x640.jpg)
The images of the models started to appear in 1966.


You can recreate the mock-up model at home. Click here to get the template for the paper craft Hardiman, designed by Matthew Hawkins. The template fits an eight inch drawing model.
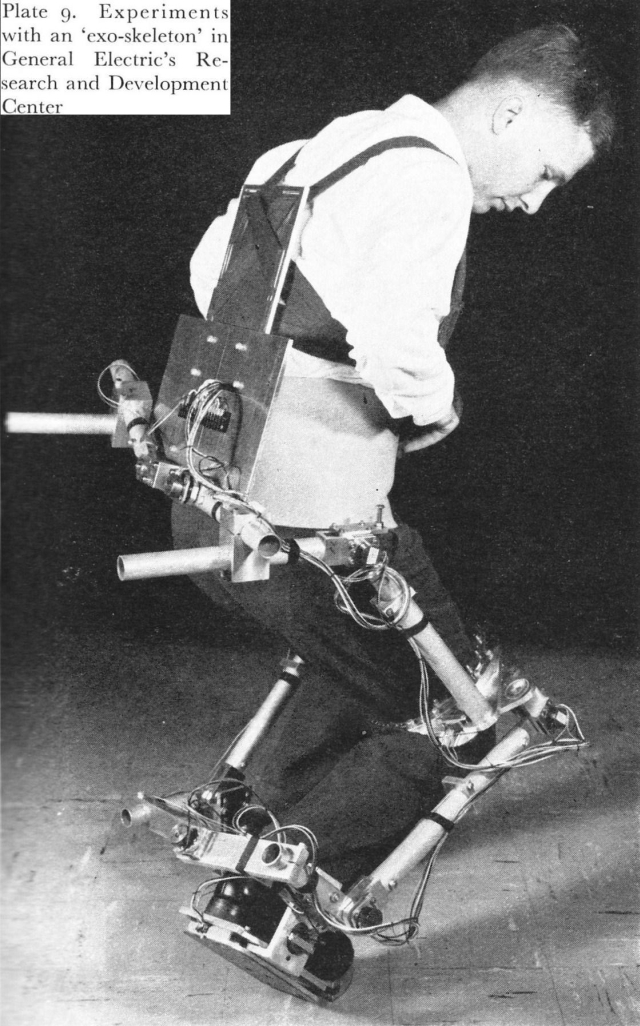
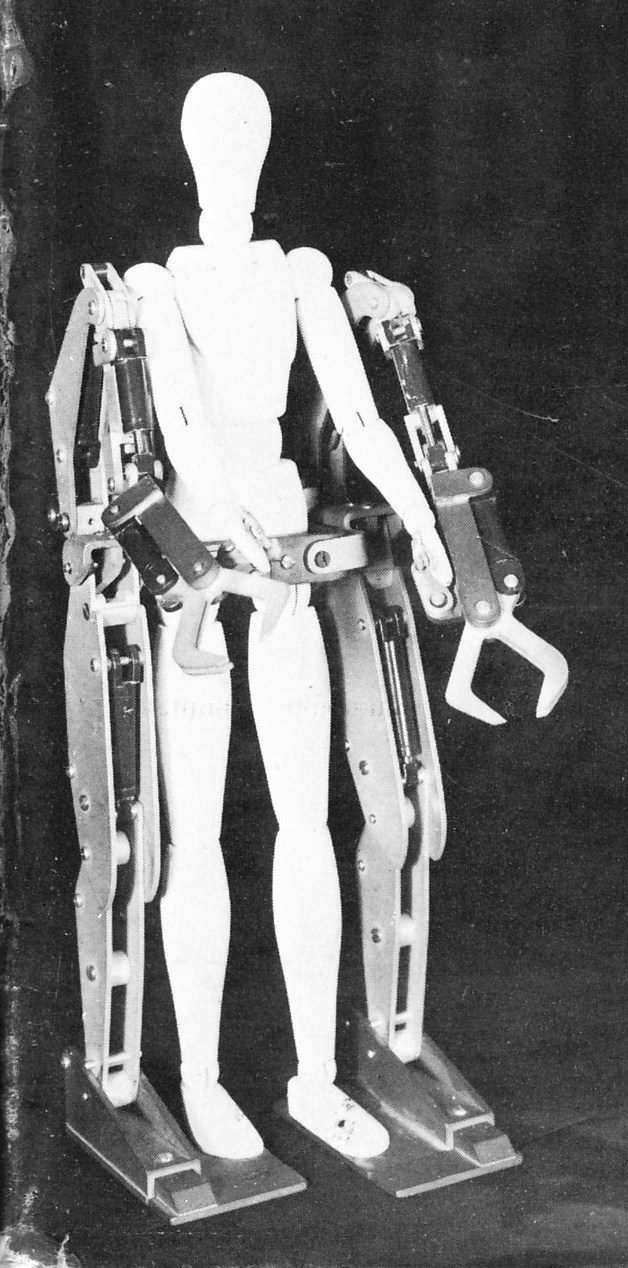
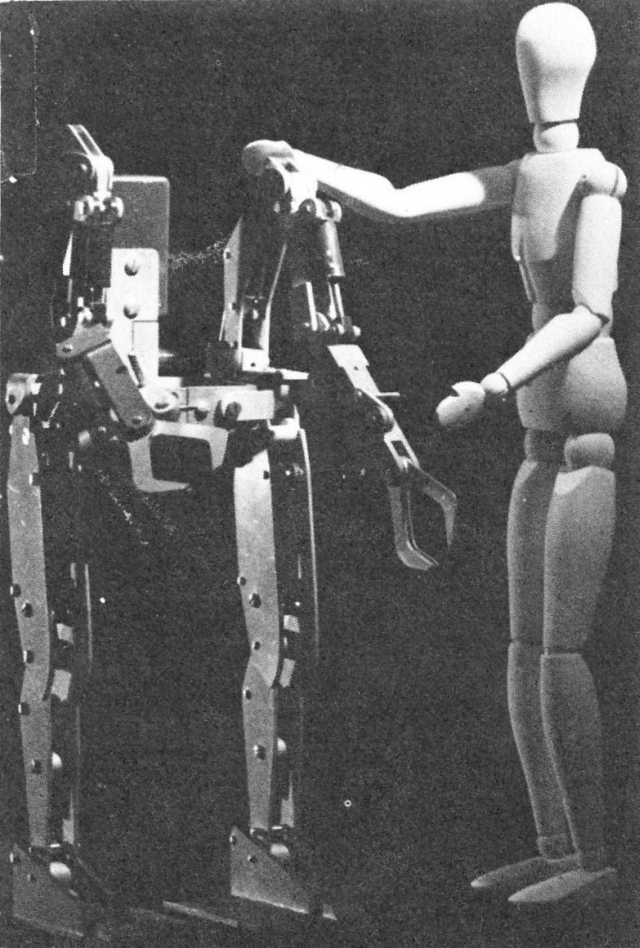
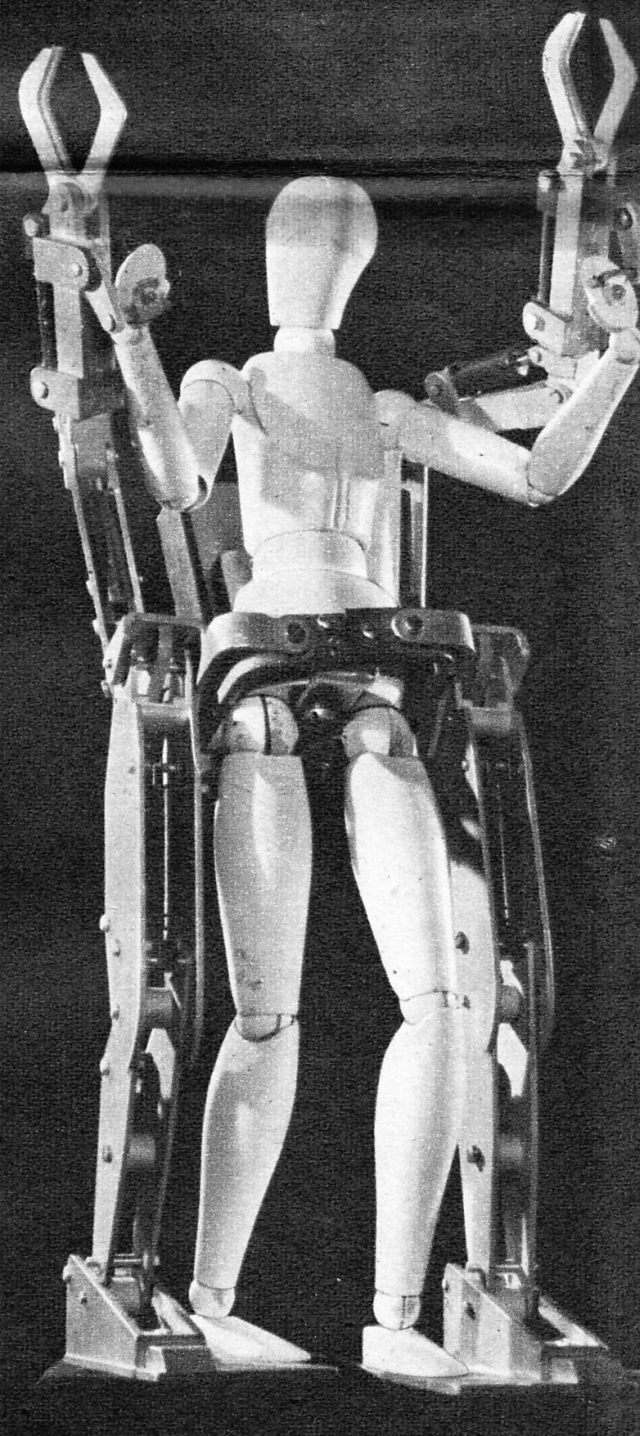
The un-powered exoskeleton by G.E. used for kinematic studies.
The concept model was scaled-up and used in the film. 1967 – The Ambushers (Fiction)
1967 – The Ambushers (Fiction)
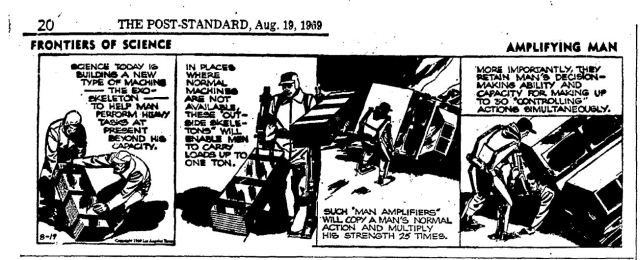
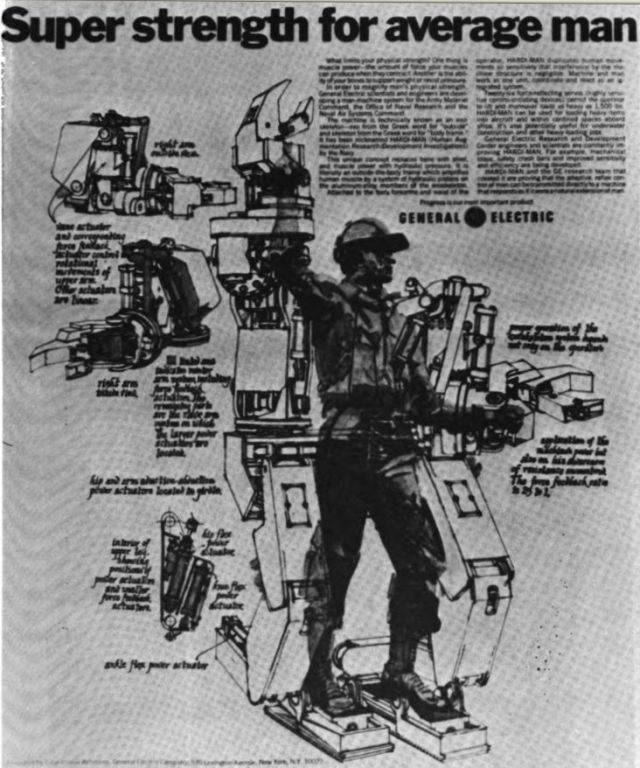
The media saw a bright future for “Man Amplifiers”.
 pdf – Mosher – Handyman to Hardiman 1967Â – A very good document covering G.E.’s Cybernetic Anthropomorphous Machine systems (CAMs).
pdf – Mosher – Handyman to Hardiman 1967Â – A very good document covering G.E.’s Cybernetic Anthropomorphous Machine systems (CAMs).
Illustration by Apollonia Saintclair (c) 2013.
See other GE CAMS here:
") 1956- GE Yes Man
1956- GE Yes Man") 1958-9- GE Handyman – Ralph Mosher
1958-9- GE Handyman – Ralph Mosher") 1962 – GE Pedipulator – Ralph Mosher
1962 – GE Pedipulator – Ralph Mosher 1969 – GE Walking Truck – Ralph Mosher
1969 – GE Walking Truck – Ralph Mosher") 1969- GE Man-Mate Industrial manipulator
1969- GE Man-Mate Industrial manipulator
I had my arm in the famous arm in about 1970 at the GE R&D Ctr workshop. When turned on, I reached down and picked up a pencil, which I could clearly feel, then squeezed and easily pinched it in two. Nothing like the force-feedback system exists today. All the Man-Mate devices were fabulous.