The 1977 ERIC-II Remote Operated Vehicle.
CABLE CONTROLLED DEEP SUBMERGENCE TELEOPERATOR SYSTEM
Jean Vertut (CEA, Saclay, France) and Joel Charles (CERTSM, Toulon, France)
ABSTRACT
ERIC II, cable controlled deep submergence teleoperator system, is designed for remote observation, investigation and intervention from a surface ship, with a 6000 meters depth capability. The system is in development at CERTSM in Toulon Navy-Yard-France on contract of Ministere Des Armees; its main parts comprise first the heavy ancillary subsystems: cable handling gear, main cable, tether, PAGODE recovery fish, data and power transmission and second the ERIC II teleoperator fish and its control module. Special attention was paid at man-machine,interface problems in the early stage of development and the result is the current development of "telesymbiotic" oriented hardwares: head mobility with T.V. and microphones sensory feedback, force feedback dexterous arms on sponsorship of CEA-Saclay-France, agility concept in the fish dynamic control with inertia feedback by kinesthetic motorized sticks also with CEA cooperation. First significative real world experience on underwater dexterous manipulative tasks was gained in late 1974 with great success. First experimentation of ERIC II is scheduled for early 1977.
The teleoperator system is based on the MA-23 arms. See here.
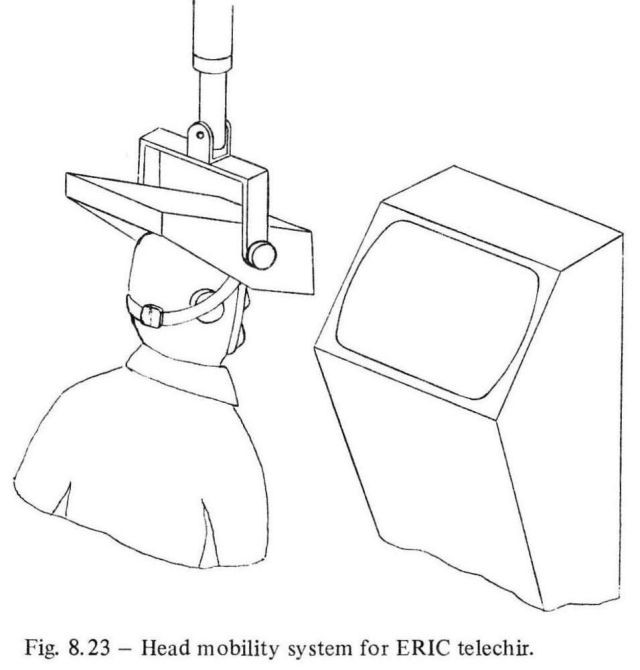
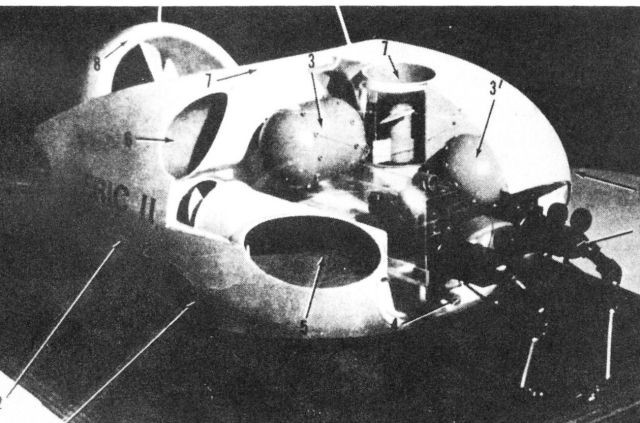
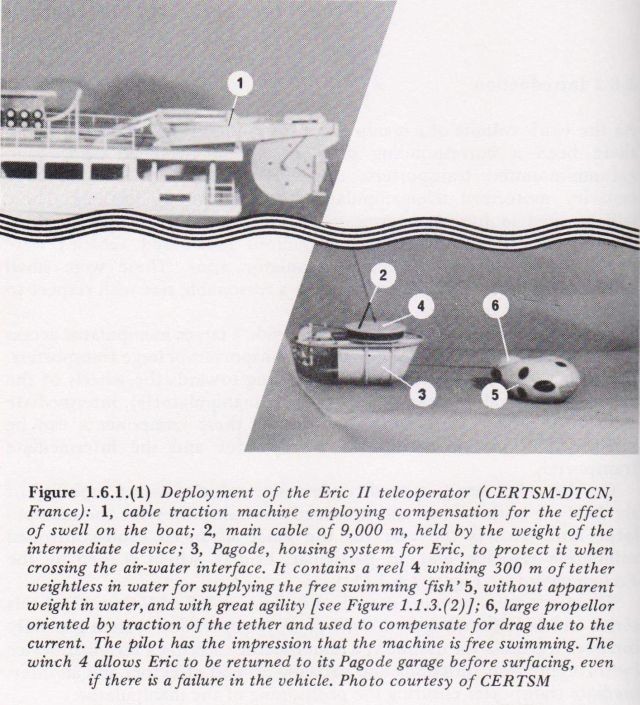
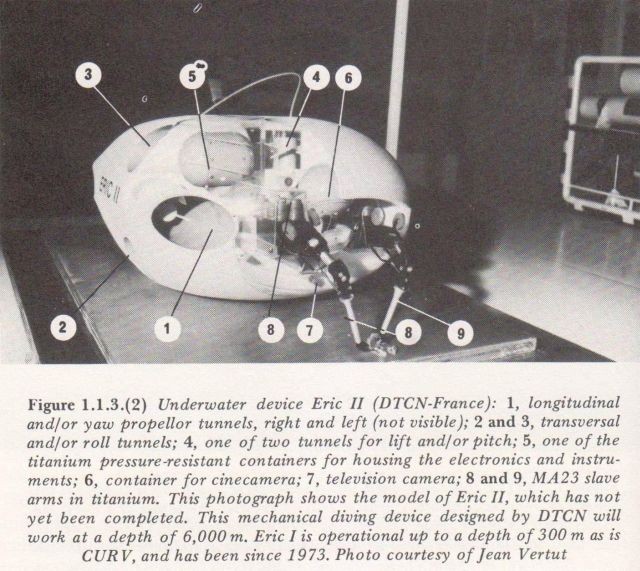
An unmanned manipulator submersible developed for the French Navy has been described in some detail by J. Charles and J. Vertut (Table controlled deep submergence teleoperator system', Mech. and Machine Theory, 1977, 12, p. 481). This is designed to search and investigate on the sea floor down to a depth of 6000 m. It consists of a 'fish-house' called PAGODE which acts as a lift between the bottom and the surface and carries the main cable and the 300 m tether cable for the neutral buoyancy teleoperator 'fish' which is called ERIC II (see Fig. 8.22 top picture above). The combined system is dropped to the required depth and then ERIC swims out of the 'fish house' to carry out the task. It is planned to have ultimately 6 degrees of freedom for the television camera, controlled by the rotation and movement of the operator's head in the support ship, the movements being in relation to his chair fixed in space. The telechir 'head' has binaural microphones connected to two earphones on the helmet in which the operator's head is placed (see Fig. 8.23). This helmet has binocular TV display and is counterweighted. ERIC weighs 4-5 tons and has 100 kW propulsive power supplied at 600 volts 400 Hz to keep the voltage control systems fairly constant and to transmit the required signals. The data transmission system is a composite one with analogue for specific purposes and digital for general purposes. The position of the 'fish' is determined over large areas by bottom acoustic transponders and panoramic sonar and locally by sonar and forward TV cameras. The basic intention is to mimic the overall capacity of a human diver without the limitations imposed by pressure. The system has a main propeller gimballed so that it always thrusts along the tiller tension direction with a tether so that it swims like a free body. It has three pairs of ducted propellers with variable blade angles and with thrust transducers for three-dimensional steering and trim. The two bilateral arms are worked by an electromechanical system with cable transmission for the movements. Source: Robots and Telechirs – M.W. Thring 1983.
A later model – ERIC-10
See other early Underwater Robots here.