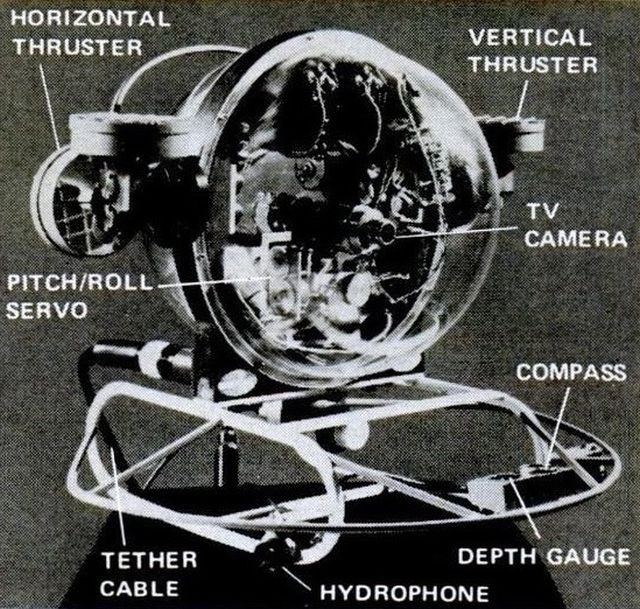
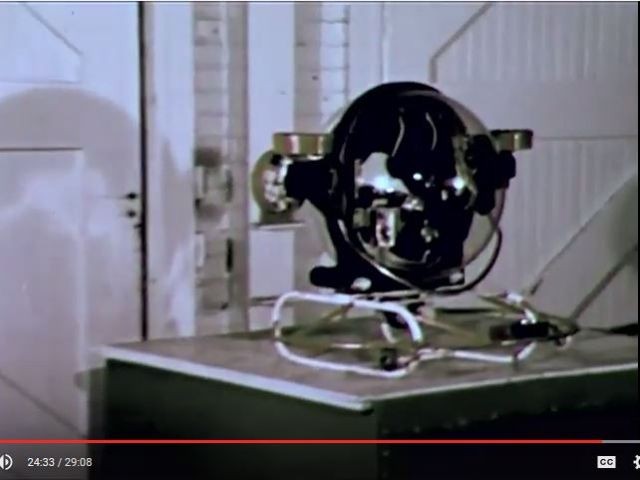
TV eye for underwater work A new device for underwater inspection work is Anthro, a remotely controlled submersible with a 20-inch-diameter plastic bubble for a hull. A television display and propulsion controls-on board ship or on dry land-are connected to the vehicle by an umbilical. Anthro's TV camera is electronically "slaved" to the operator's head. As he moves his head, the scene he views is moving in exact synchronization. Headphones provide binaural sound-transmitted from hydrophones aboard Anthro-as an additional aid in orienting the vehicle. (If Anthro bumps into anything, the bump is heard topside.) Movement of Anthro-forward, reverse, up and down-is by hand controls. Device was developed by Hydro Products, San Diego. Source: Popular Mechanics, Nov 1973.
See ANTHRO – 24:24 into the clip.
ANTHROPOMORPHIC VEHICLE SYSTEM (aka ANTHRO).
Various stills from the above video showing duplicated (anthropomorphic) head movement.




Project headed by Willis "Will" R. Forman (seen in video above with "Deep View" submersible).
ANTHRO
Source: Remotely Operated Vehicles, by R. Frank Busby Associates, Inc., August 1979.
From 1958 through 1974 the U.S. Navy constructed and funded development of eight more ROVs. Three of these were additions and replacements for the original CURV, the others were primarily testbed vehicles for advancement in technology, two such vehicles were TORTUGA (not shown) and ANTHRO built by Hydro Products, San Diego, California.
The design goal of TORTUGA was to produce a small (relative to CURV) maneuverable underwater video system designed for close examination of normally inaccessible underwater areas. Although its military application is not publicly reported, TORTUGA' s shape, size and mode of operation indicates a potential for deployment from a submarine. Several experimental versions of TORTUGA were built, the first units relied on water jets for propulsion, later vehicles used propellers to increase maneuvering and responsiveness.
The ANTHRO (anthromorphic) vehicle was a follow-on to TORTUGA which was also constructed by Hydro Products with U.S. Navy funding. ANTHRO was developed to investigate a concept wherein normal human perception would be preserved in the vehicle. The technique employed was referred to as "head coupled" video presentation and involved slaving the vehicle and/or camera orientation to the operator's head attitude. The video presentation was mounted on, and moved with, the operator's head. Consequently, the scene being viewed moved in exact synchronization with the operator's head movement, and his memory recorded the relative location of all objects in the field of view. Binaural audio inputs (obtained from a pair of hydrophones on the vehicle) were also continuously provided to investigate the feasibility of detecting and localizing underwater objects either by their own self-generated sound or by reflected sound generated from the vehicle.
The ANTHRO operator's control station included an instrumented swivel chair and a helmet containing a television display (a 5 inch TV screen), roll, pitch and azimuth sensors and dual headphones. Manned controls for vehicle maneuvering, depth functions and television camera remote focus were provided at the operator's right hand. Vehicle depth was controlled by servo-controlled vertical thrusters which automatically maintained a desired depth.
SCAT (Submersible Cable-Activated Teleoperator) was a U.S. Navy-built follow-on to ANTHRO and served as a test-bed demonstration vehicle for the purpose of evaluating head-coupled television and three-dimensional television display.
The Institute of Oceanology, USSR, capitalizing on experiences with the 4,000m CRAB-4000 in 1971, developed the MANTA vehicle. The operational theory behind MANTA was that it is practically impossible for a man to successfully operate a moving system without a proper feedback which acts upon the whole complex of sensors within his central nervous system (Mikhaltsev, 1973). A group of tenso-sensors was mounted on MANTA and a special servo-controlled, hydraulically-driven operator's chair which closed the feedback circuit, was constructed. The chair repeated all the roll and pitch movements of the underwater vehicle and allowed the operator to feel MANTA' s maneuvering. Further sophistication was added by incorporating the feedback provided by the manipulator's tenso-sensors into a simple computer which gave the preprogrammed computer the ability to command the manipulator system. As of 1973 the preprogramming was fulfilled, but only under laboratory conditions.
Anthropomorphic Vehicle System
by Robert L. Hittleman, Manager, Systems Division
Oceanographic Engineering Company, An affiliate of Dillingham Corporation, and
Will Forman, Submersible Project Manager at Naval Undersea Research & Development Center
Published in: Underwater Photo-Optical Instrumentation Applications III by Seibert Q. Duntley; Joe J. Lones; H. S. Weisbrod, Honolulu | January 01, 1971.
Abstract
The efficient performance of any task in the hostile underwater environment requires that due care be exercised in the design of the man-machine interface to take full advantage of the enormous potential available in the human mechanism. In particular, it was believed that significant benefits could be realized if the human brain was introduced as an integrally functioning element of an under-water remote controlled vehicle system.
Dillingham personnel, working in close coordination with Dr. McLean and Will Forman of the Naval Undersea Research and Development Center, San Diego, investigated a concept wherein normal human perception would be preserved in the design of a remote controlled, miniature, unmanned submersible. The technique involved coupling the vehicle operator's head motion and direction to that of the vehicle and its television camera. A pair of hydrophones on the vehicle provides a binaural listening capability. The objective was to demonstrate the feasibility of directing underwater systems using acoustic and visual sensors which acquire information in the same manner as does the "human mechanism"–thus giving rise to the Anthropomorphic identification; that is, a machine system designed with human characteristics In this system, the operator's brain functions as a neurological computer and is a functional element of the control and data processing system. Unnatural mental coordinate-transformation type operations inherent in previous man-machine interface designs would thus be eliminated.
System Design
The system was designed with the criteria of simplicity and low cost foremost; in order that this experimental, feasibility demonstration model be fabricated inexpensively and in the shortest time period possible. Maximum use of off-the-shelf equipment was made, and hard wiring, rather than printed circuit boards were used, in recognition of the one-of-a-kind nature of the development program. This latter feature also allowed one to incorporate design changes with relative ease.
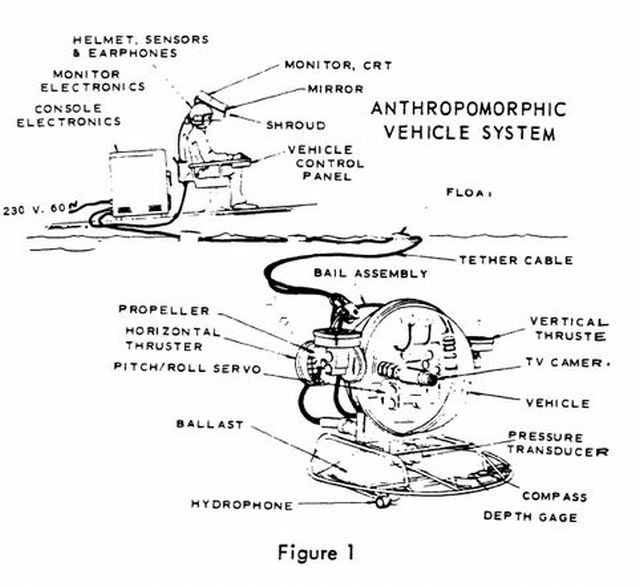
The total system is shown in Figure 1, and consists of:
. a submersible vehicle and tether cable,
. an operator's control station, and
. an electronics console.
The vehicle has a 20" diameter, transparent plastic sphere.
Possibly related patent.
Submersible visual simulator for remotely piloted systems
Publication number US3916094 A
Publication type Grant
Publication date 28 Oct 1975
Filing date 21 Jun 1974
Inventors Frederick A Marrone
Original Assignee US Navy
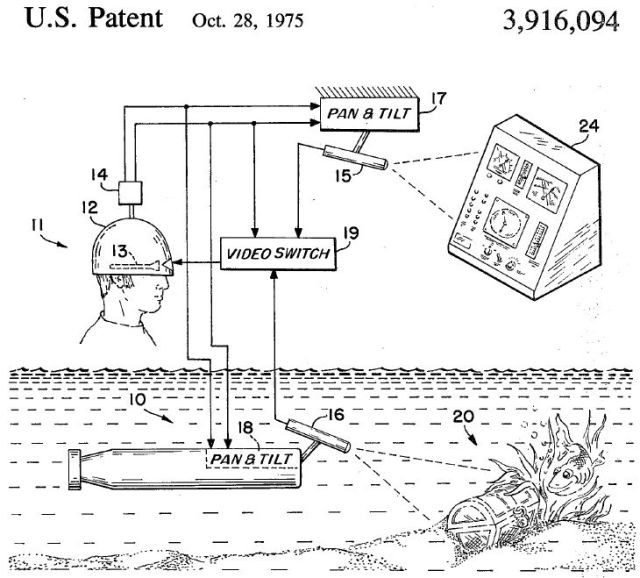
ABSTRACT A visual simulator for obtaining the illusion of control presence in a remotely controlled vehicle comprises two television camera systems which are coupled to a cathode ray tube display carried by the head gear of the operator of the remote controlled vehicle. A video mixer or switch combines the images recorded by the two television camera systems into a single display. A position sensor attached to the helmet worn by the operator is connected to the video mixer to control the position of the scenes recorded by the two television camera systems on the cathode ray tube display.
SUMMARY OF THE INVENTION This invention overcomes the aforestated deficiencies of the prior art by providing a head controlled television monitoring system in which two television cameras are employed. The first camera is mounted on a remotely controlled vehicle to provide the customary exterior view from said vehicle. The second television camera is directed toward a control console for the vehicle. Of course, the control console may be at the operators position and the instruments and control positions thereon may be telemetered to the vehicle. The illusion of presence is further enhanced by combining the two views from the respective television cameras into a single cathode ray display. The two images are mixed in the cathode ray tube display in dependence upon a sensed position of the operators head. Thus, when the operator looks forward, he is presented a view of the exterior of the vehicle. However, when he moves his head in a predetermined direction to a predetermined position, the view afforded by the television camera monitoring console is presented on the viewing cathode ray display. In this fashion, an illusion of looking out a transparent. canopied cockpit on the front of the remote controlled vehicle is created with the control console placed adjacent said canopy.
STATEMENT OF THE OBJECTS OF INVENTION It is an object of this invention to provide an improved TV monitor system.
A further object of this invention is the provision of a TV monitoring system adapted for use in remote controlled vehicles.
A further object of this invention is the provision of a stereoscopic television system.
Another object of this invention is to provide a stereo-scopic television system for use in remotely controlled vehicles to enhance the control presence of said vehicles.
See other early Underwater Robots here.