1966 – CRAB Remote-controlled Underwater Craft by Dr. Vyacheslav Yastrebov

"Aquator" [Дкватор] – a moving robot for underwater research – came out of the walls of the Bauman Institute. Designers believe that this device will become active assistant hydrologists, ocean scientists, biologists – all those who study the depths of the sea.
The CRAB is named "Aquator" in this article.
The Bauman Institute of Underwater Devices and Robotics is part of Moscow State Technical University, the oldest institute in Russia; it also is one of the largest. Before the Revolution it was called the "Imperial High School."
Source: Engineering – Youth 1980-10, page 10

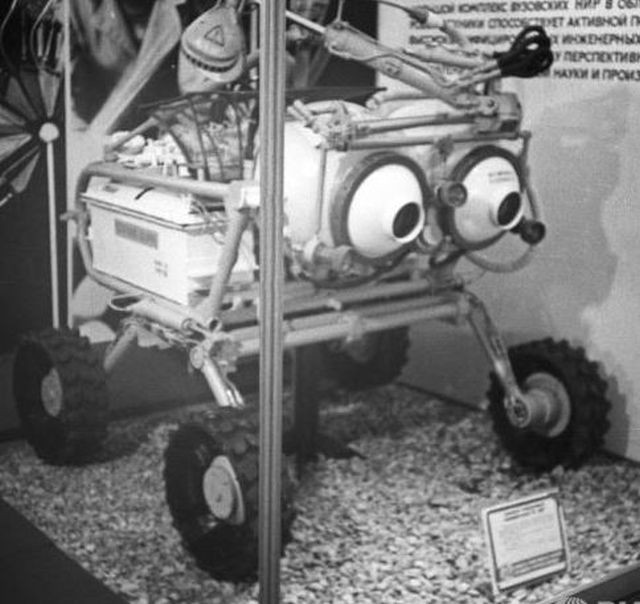
The "CRAB". Vyacheslav Yastrebov is on the far right in this photo.
The "Crab" was conceived as early at 1966 by Vyacheslav Yastrebov, Head of the Underwater Research Technique Laboratory. Yastrebov was one of the main designers of the robot. At the time, the most difficult problem was that of communication and a cable from the surface to the vehicle was the only feasible method. The use of computer-controlled programmes and master-slave manipulators was also envisioned, along with a television camera.
Two Crabs were built. The first was the "Crab 3,000" — a remote-controlled vehicle for depths of 3,000 m. The second crab, the "Crab 4,000" was said to be built in 1971, although the Crab 3,000 was undergoing sea trials in 1972!
Sources: Underwater Association of Malta – 1966, The Daily Review – Volume 13 – 1967 Page 1787
Lunokhod gets into deep water
Soviet oceanologists have recently been testing a new device for exploring the ocean bed. Nicknamed the Crab, it is similar in conception to their mooncar—Lunokhod-1. The Crab is mobile, has apparatus for studying the sea floor and taking samples, and has a television system. The control crew work from a mother ship, which has a cable link with the Crab for transmitting commands, television pictures and any other signals.
The Crab's first research mission was studying the underwater volcanoes in the Mediterranean, north of Sicily. The mother ship was the research vessel—the Akademik Sergei Vavilov—and the research team included designers of the Crab from the Academy of Sciences' Institute of Oceanology in Moscow. They used the Crab in two volcanic areas, lowering it at one time to a depth of 1250m. It sent back television pictures, took samples from the surface of the volcanoes, and, according to the head of the expedition, V. Yastrebov, generally worked successfully.
Source: New Scientist – Jul 27, 1972 – Page 196, Vol. 55, No. 806
The designers used a preprogrammed simple computer to control the CRAB – 4000.
Source: Marine Technology Society Journal – Volume 7 – Page 55 1973

The 'crab' remote-controlled underwater craft by YASTREBOV, V. Text Source: Underwater Journal. 5:117-119:June 1973.
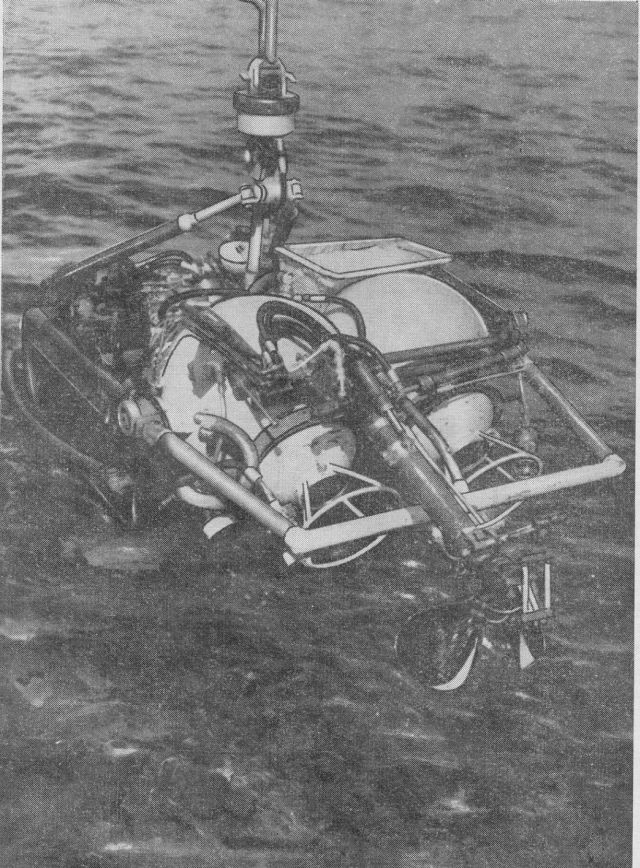
The 'Crab' remote-controlled underwater craft is intended to carry out simple operations for collecting sea-bed material and animal specimens from the ocean floor at depths of up to 3600 m. It carries a TV-system, a manipulator, a hydraulic power system, a remote-control system and an autonomous storage battery supply. The entire electronic section of the equipment is housed in the front part of the 'Crab' in spherical boxes which are provided with portholes through which observations are conducted with the aid of television and a photographic camera. The boxes carry a hinged telescopic manipulator, the gripping part of which is adjusted for picking up objects of any shape as well as loose ground samples. The manipulator has a range. relative to the immobile craft, 0.4 m. The whole craft is positioned on a three-bearing flat platform and may revolve, relative to the platform, around its vertical axis, for 320°, allowing scanning of the area when the craft is on the ocean floor. The spherical boxes with the manipulator may be inclined to 30° giving the craft the facility for scanning, and the manipulator the possibility of servicing, a circular zone with an inner diameter of 2.2 m and outer diameter of 3 m. The craft itself is 1.4 m long, 1 m. wide and 0.4 m high and weighs 620 kg in air. After scooping the sample. the manipulator turns back and stops in its extreme rear position over a bin into which the scooped materials are placed. (Author).
Source: Underwater Medicine and Related Sciences: A Guide to the Literature Volume 2 … By Margaret F. Werts, Charles 'N. Shilling
An Overview of Non-U.S. Underwater Remotely Manned Manipulators by A. B. Rechnitzer – Received 9 June 1975
U.S.S.R.
The U.S.S.R. is actively involved in automation research. The importance of this technology is evident by a special Commission on the Theory and Principles of Robot and Manipulation Devices within its Academy of Science. The Commission is responsible for forecasting development trends and the U.S.S.R. automation research program. The U.S.S.R. is putting significant emphasis on the development of robots and remotely operated systems involving supervisory control, artificial intelligence and systems development. Russian literature related to industrial robots and manipulators is extensive and reflects strong national interest and support active research, development and a high level of competence.
Research on undersea remotely manned systems at the Pyotr Shirshow Institute of Oceanology of the U.S.S.R. Academy of Sciences is comprehensive and reflects much innovation. Vyacheslav Yastrebov, Head of the Underwater Research Technique Laboratory leads the development of the theoretical and engineering principles contributing to the design of remote controlled underwater craft. Beginning in 1964 the aim of Yastrebov and his associates has been to develop systems for deep ocean research.
The first system to appear was called the Crab. The unmanned cable-controlled unit carried a TV system and photographer camera, a hinged telescopic manipulator, a hydraulic power system, a remote control system and an autonomous storage battery supply. The sample manipulator gripper could pick up objects of varying shapes at a maximum reach of 0.4 m.
The Crab can be landed on the sea floor to gain a stationary and stable condition. The undercarriage of the craft is fitted with a three-bearing platform that permits controlled rotation of the upper section containing the TV, camera and manipulator can be rotated around the vertical axis 320°. The upper section can also be inclined 30° for scanning and use of the manipulator through a concentric work area envelope with a 2.2 m inner dia. and 3 m outer dia. The manipulator scoop (gripper) is turned back (elbow) and retracted to position the sample over a storage bin. The manipulator and platform rotation are hydraulically powered.
Control commands and slow frame rate (10 frames per sec) television image are communicated to a surface support vessel via a coaxial cable. A frequency-time separation technique is used for transmitting control and TV-image signals at a carrier frequency of 3.5 Mc/s. Stepped finders are used in the craft as switching devices and information is transmitted via 22 channels.
The Crab went through its sea trials in the Black Sea in early 1972 down to a depth of 1500 m. Later the craft was used in the Tyrrhenian Sea to explore the tops of volcanic mountains summits at depths of 100-1200 m. Pictures of the sea-bed were obtained using TV and motion picture cameras in both the flying and resting modes. Specimens were collected using the manipulator.
An upgraded version of Crab Two has been built for operation to depths of 4000 m. Its manipulator, designed for 4000 m. use has 7° of freedom and is described as a copying manipulator (interpreted to mean master-slave). This manipulator has been tested aboard the U.S.S.R. manned submersible Sever-2.
MANTA
Experienced gained from the two versions of Crab has lead to the development of a system of operating near the sea floor. This craft, named Manta is equipped with thrusters and a push-button control panel. Manta encompasses many features common to the Crab. A key added feature is the surface controller's chair that is coupled to the Manta vehicle through a servo-feedback circuit that repeats the pitch and roll of the Manta to provide an operator sense of presence. This innovation has proven to be very effective when tested against the traditional fixed chair for the operator.
The Manta manipulator performance has been upgraded by the introduction of preprogrammed motion instructions to carry out repeat actions involved in grasping and storing collected samples.
Source: Mechanism and Machine Theory, 1977 Vol 12. pp. 51-56 Pergamon Press.
The Institute of Oceanology, USSR, capitalizing on experiences with the 4,000m CRAB-4000 in 1971, developed the MANTA vehicle. The operational theory behind MANTA was that it is practically impossible for a man to successfully operate a moving system without a proper feedback which acts upon the whole complex of sensors within his central nervous system (Mikhaltsev, 1973). A group of tenso-sensors was mounted on MANTA and a special servo-controlled, hydraulically-driven operator's chair which closed the feedback circuit, was constructed.
The chair repeated all the roll and pitch movements of the underwater vehicle and allowed the operator to feel MANTA' s maneuvering. Further sophistication was added by incorporating the feedback provided by the manipulator's tenso-sensors into a simple computer which gave the preprogrammed computer the ability to command the manipulator system. As of 1973 the preprogramming was fulfilled, but only under laboratory conditions. Source: Remotely operated vehicles / prepared by R. Frank Busby Associates, 1979.

The "MANTA-1500"

See other early Underwater Robots here.