1969 – NR-1 Submersible by General Dynamics.
Early design sketch of the NR-1 sub.
Builder: General Dynamics Electric Boat
Laid down: 10 June 1967
Launched: 25 January 1969
Source: Wikipedia
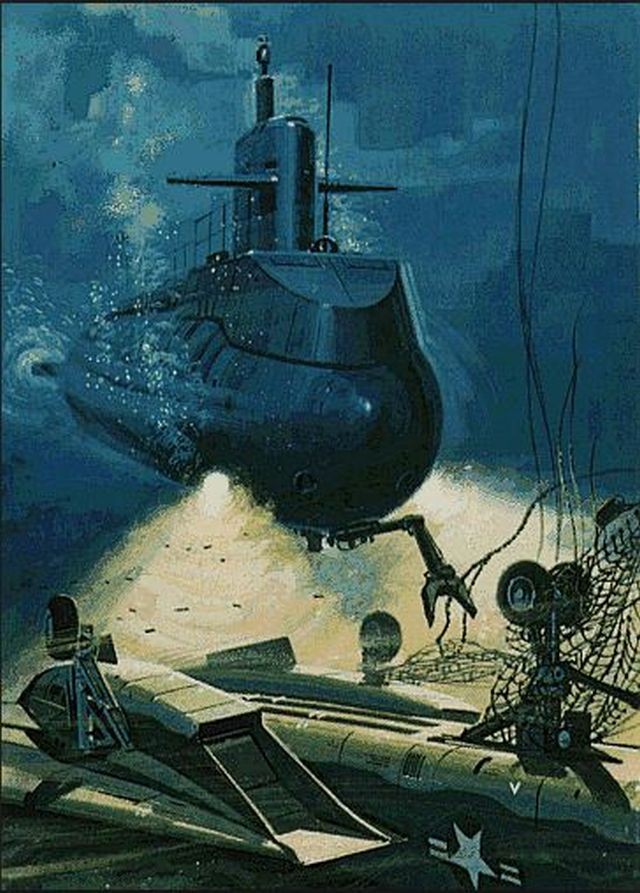
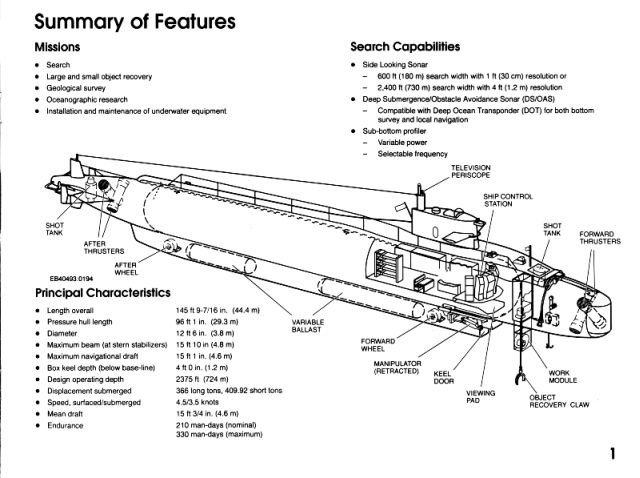
NR-1 is able to land on the seafloor on a pair of retractable wheels and can lift heavy objects with a manipulator arm system. NR-1's major strength, however, is the ability to provide a stable platform and abundant electric power for surveillance missions of two weeks or longer.
The custom-built, one-of-a-kind vessel carried no weapons, measured just 140 ft and travelled at just four knots, but held ten men for up to a month at a time.
It was a pet project of Admiral Hyman Rickover, the 'father of the nuclear Navy', and contained a custom-built mini nuclear reactor which powered it as deep as 3,000 feet.
Once on the sea bed, it had wheels and lights to explore the ocean floor.
It was mainly a research sub, but also performed Cold War military missions which remain highly classified.
See also Simon Lake's 1931 "Explorer" as an earlier example of a submersible on wheels!
See other early Underwater Robots here.