1968 – Legged Underwater Vehicle Patent by Hugh A. Ballinger.
Underwater vehicle
Publication number US3550386 A
Publication date 29 Dec 1970
Filing date 28 Mar 1968
Priority date 31 Mar 1967
Inventors Ballinger Hugh Anthony
Original Assignee Atomic Energy Authority UK
An underwater vehicle comprising a free flooding streamlined body shell attached to a control cable, one or more retractable manipulator arms mounted on a rotatable turret within the body, propulsion means and manoeuvring control means, and a retractable limb.
This invention relates to remotely controlled devices and is particularly concerned with devices for undersea use.
The requirement for remotely controlled marine devices arises for exploratory purposes, seat bottom sampling and the inspection and recovery of objects on the sea bed.
According to the present invention an underwater vehicle comprises a free flooding streamlined body shell attached to a control cable, one or more retractable manipulator arms mounted on a rotatable turret within the body, propulsion means and manoeuvring control means, and a retractable limb.
Preferably the limb is provided with suction pad at its free end, and the propulsion, manoeuvring control, and retractable limb are powered by a low-pressure water moving pump.
Preferably the limb is mounted on a rotatable sponson and the sponson is provided with a water jet discharge opening forming part of the said manoeuvring control means. The water jet discharge opening or openings may be arranged axially and/or radially with respect to the axis of rotation of the sponson if desired.
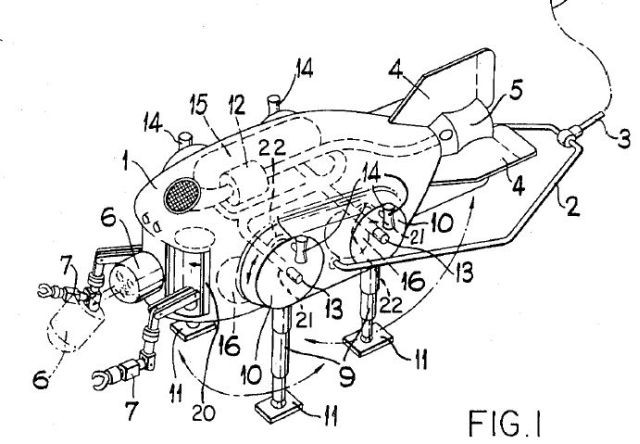
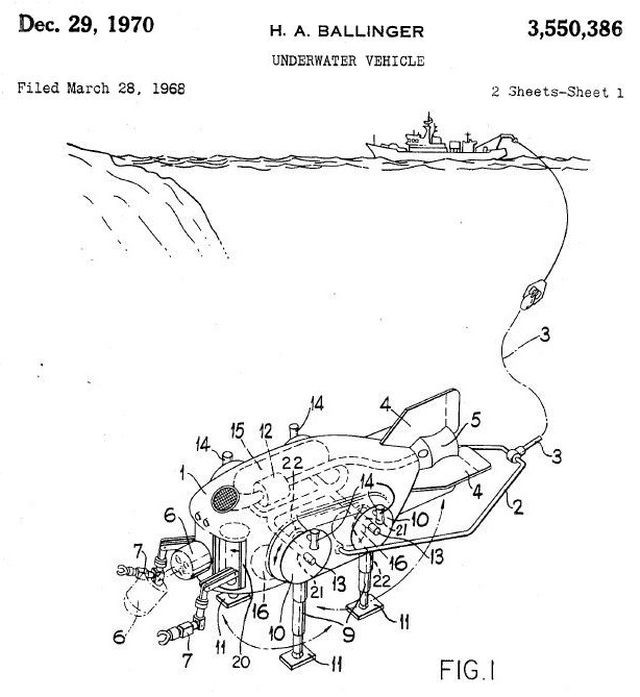
FIG. 1 above is a diagrammatic drawing showing an underwater vehicle constructed in accordance with the features of the present invention.
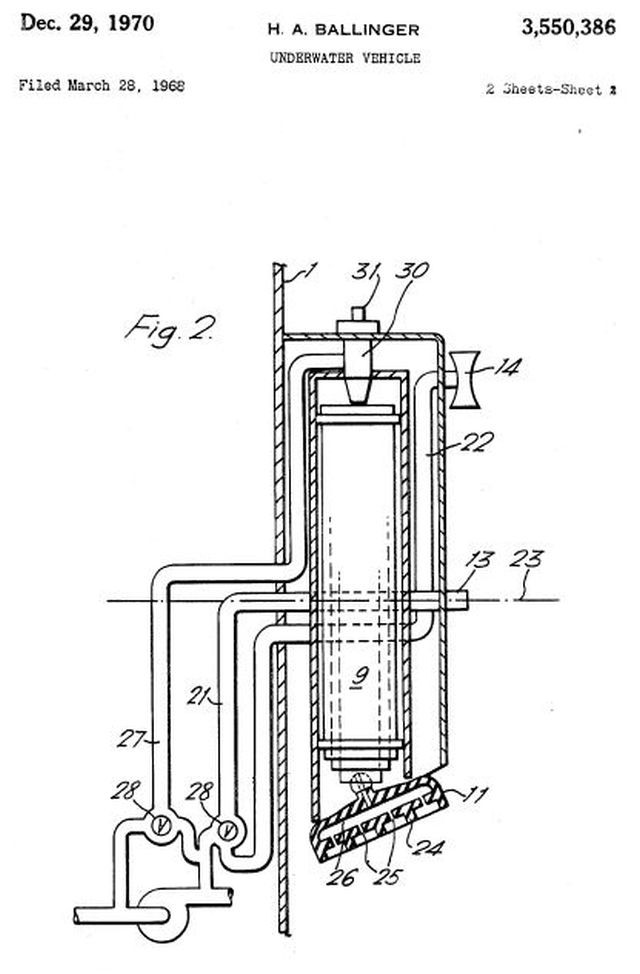
FIG. 2 below is an enlarged schematic view of a portion of FIG. 1 showing the limb in the retracted position, showing the foot pad in cross-section and showing the fluid lines schematically.
Referring to the drawings accompanying the complete specification the vehicle comprises a streamlined fibreglass body shell 1 formed on an internal tubular steel frame and attached by a cable stirrup 2 at the end of a control cable 3. The body is provided with guide vanes 4 which surround the main propulsion jet apertures 5 at the rear of the vehicle. A retractable pod 6, positioned centrally at the front end of the body, houses a television camera unit. One of a pair of retractable hydraulically operated manipulator arms 7 is housed in a rotatable turret located within the body on each side of the pod 6. Search light and television camera lights (not shown) are also located in faired housings on the body.
The body is provided with four retractable telescopic limbs 9 each limb being mounted on a rotatable sponson 10 rotatable about axis 23 attached to the sides of the body. Each limb terminates in a foot portion 11 and the foot is provided with a plurality of suction pads 24, each pad having a limiting orifice 25 and communicating via a central duct 26 in the limb with a low pressure sea water pump 12 through limb 9 and line 27 located within the body shell.
Note that the legs are not for walking.
See also 1967 – RIVET (Remote Inspection VEhicle Telechiric) by Hugh A. Ballinger.
See other early Underwater Robots here.