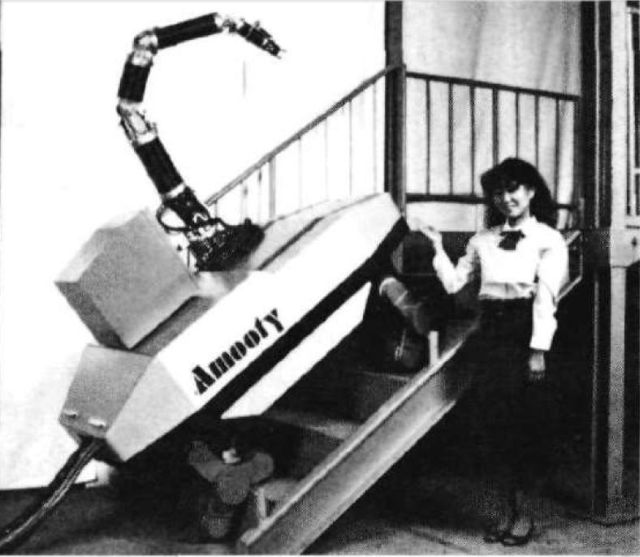
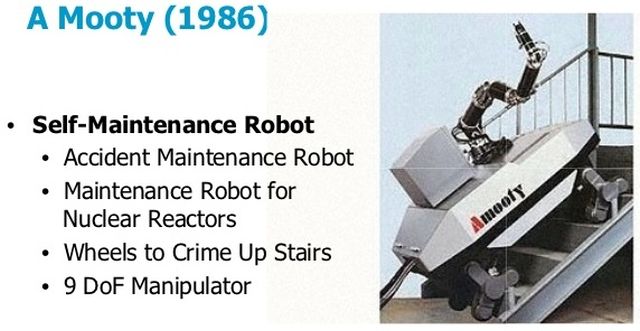
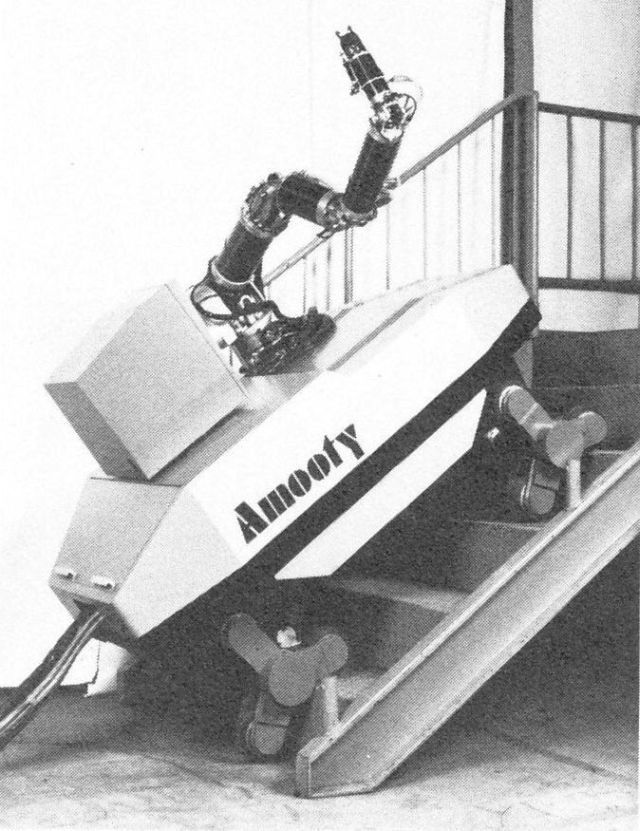
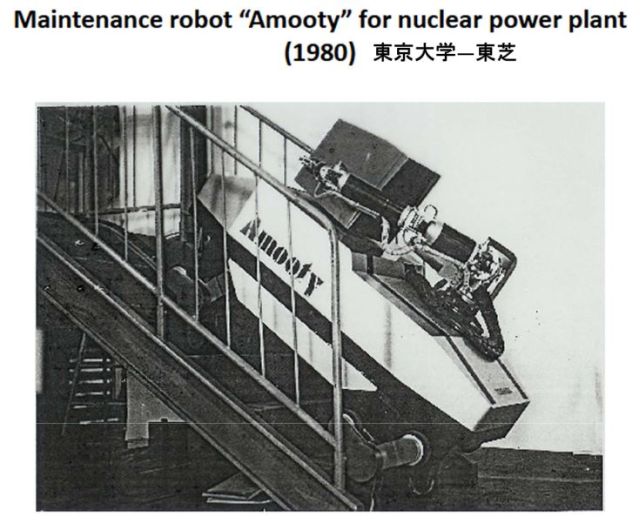
1985 – Nuclear Inspection Robot "AMOOTY" climbing stairs in a mock-up of a nuclear power plant.
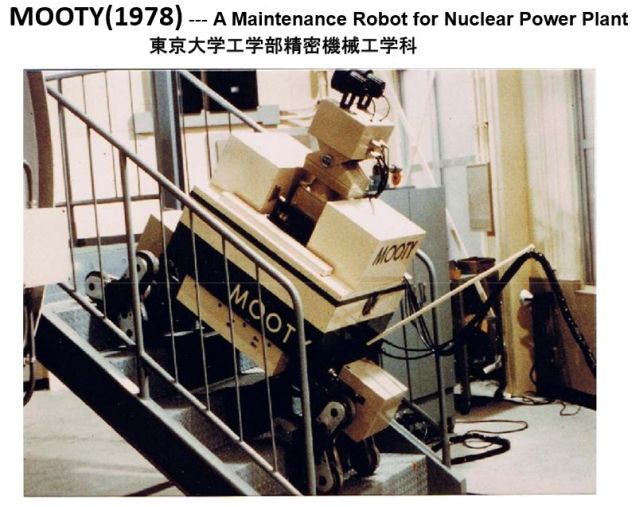
Before AMOOTY there was MOOTY. No manipulator arm here, just vision and star-wheel propulsion.
Text Source: Inside The Robot Kingdom, Frederik L. Schodt, 1988
If cleverly designed, a robot on modified wheels or tank treads can still have considerable maneuverability. Separate from the ART project, three of the ARTRA members—Mitsubishi, Toshiba, and Hitachi—have been building their own mobile robots for nuclear power plants. Hitachi and Mitsubishi have in the past produced experimental models with modified tank treads that either bend in the middle or reconfigure themselves for stair climbing. Toshiba has created a wheel-based design.
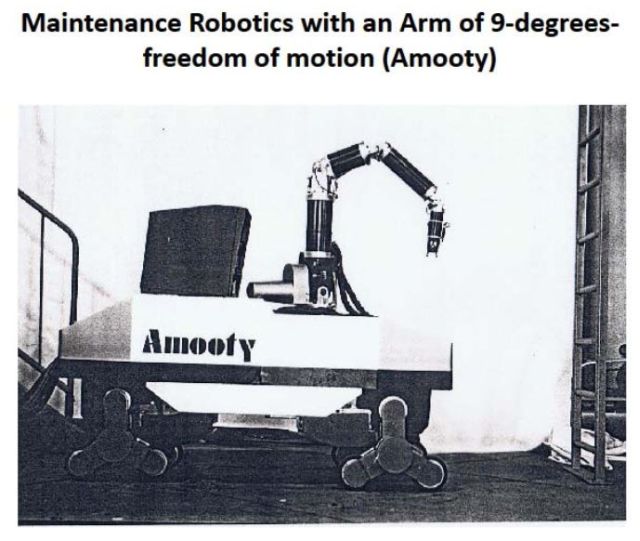
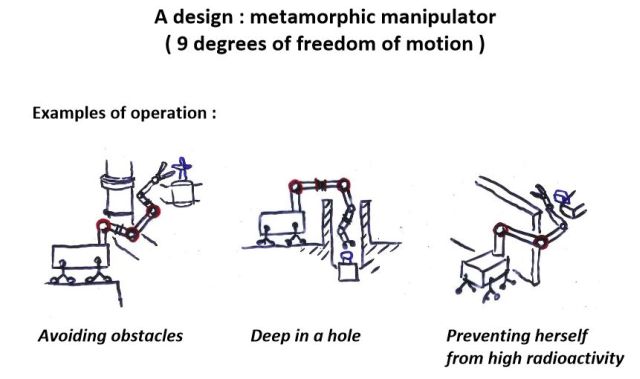
Near Yokohama, inside a mockup of a nuclear reactor that contains stairs, valves, and ladders, Toshiba has experimented with traditional crawler-type robots and even a robot that does nothing but climb ladders. Its current pride and joy is AMOOTY, partly funded by MITI money. AMOOTY (an acronym based on the names of the six men at the University of Tokyo who designed it) is a semi-"intelligent" robot with a vision system enabling it to navigate—a TV camera allows it to recognize specially placed symbols in the reactor and a laser beam measures distance. Instead of a traditional industrial-robot-style manipulator, AMOOTY uses one that looks like an elephant trunk with nine degrees of freedom—two more than the human arm.
The most novel aspect of the AMOOTY robot is its means of locomotion. Inspired, perhaps, by the old stair-climbing carts used by Venetian porters, each "wheel" is in the shape of a clover, with each "petal" of the clover containing a smaller, independent wheel. On flat ground the clovers do not turn—only the smaller wheels do. To climb a staircase, or cross over an obstacle, however, the larger clovers themselves are rotated. AMOOTY still has many problems. Its power is supplied by a cable, its speed is too slow, and it is too heavy and large. But it is a stable design. When engineers in a remote command room (watching through television cameras, with robot positions in the reactor displayed on computer screens as both outline and three-dimensional shapes) put AMOOTY through its paces, the "wheeled" robot lurches right up the stairs.
Professor Hiroyuki Yoshikawa of the University of Tokyo Mechanical Engineering Department led the team that worked with Toshiba to design AMOOTY. "In Japan we tend to neglect research on the basic purpose of our design," he says. "My specialty is design theory, and I consider design to be the science of function. For AMOOTY, for example, we used functional analysis to research the concept of maintenance in nuclear reactors, and came up with a system of locomotion and an arm that does not exist in nature."
The manipulator arm had 9 degrees-of-freedom.
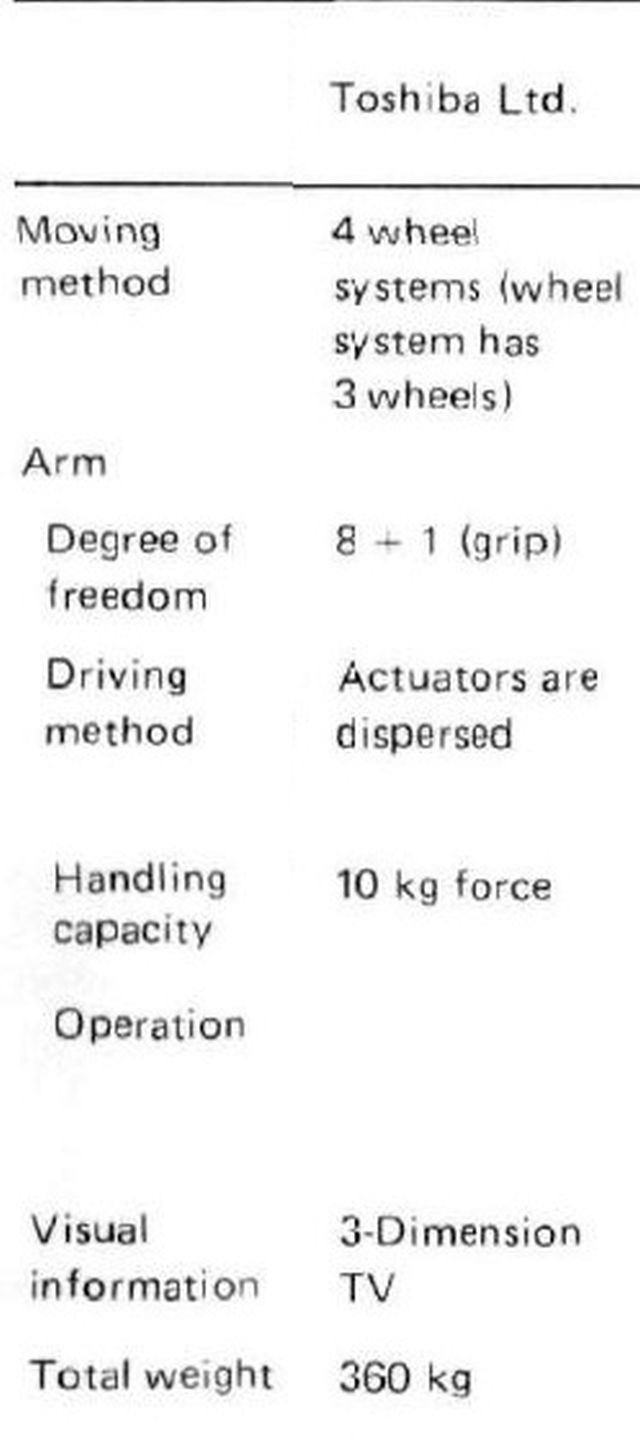
Brief technical specs of AMOOTY.
Interesting comment by Hiroyuki Yoshikawa, one of AMOOTY's developers:
Despite Japan’s leadership in robotics, nuclear plant operators assumed that robots would not be needed to deal with an accident. The Times quoted Hiroyuki Yoshikawa, an engineer and a former president of the University of Tokyo, as saying, "Instead, introducing them would inspire fear, they said. That’s why they said that robots couldn’t be introduced."
Even though Yoshikawa, a robotics expert, was among those who built a prototype called Mooty that was designed to handle high levels of radiation and navigate rubble that might be expected as a result of a nuclear accident, the robots were not put into production. Consequently, after the Fukushima accident, Japan had to rely "an emergency shipment of robots from iRobot, a company in Bedford, Mass., more famous for manufacturing the Roomba vacuum. On Friday, Tepco deployed the first Japanese-made robot, which was retrofitted recently to handle nuclear accidents, but workers had to retrieve it after it malfunctioned."
Yoshikawa told the Times that Japan’s rejection of robots designed to respond to nuclear accidents "was part of the industry’s overall reluctance to improve maintenance and invest in new technologies."
Source: Powermag
The only English written paper I found on AMOOTY is dated 1985. I don't know how accurate the caption dates are on MOOTY (1978) and AMOOTY (1980).
T. Arai, H. Yoshikawa, M. Takano, S. Ozono, G. Odawara, T. Miyoshi, K. Shimo, and T. Mikami. A stair-climbing robot for maintenance: "AMOOTY". In Proc. of the Seminar on Remote Handling Equipment for Nuclear Fuel Cycle Facilities, pages 444-456, 1985.
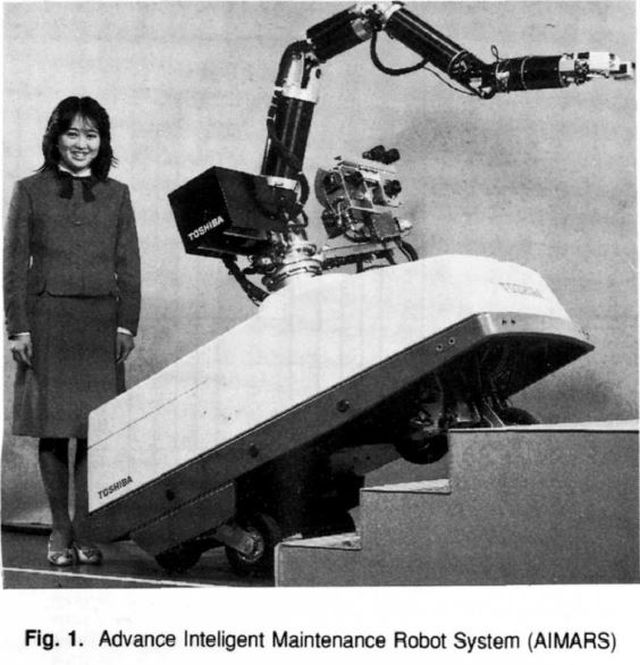
AMOOTY was further advanced by Toshiba and now called "AIMARS" – (Advanced Intelligent MAintenance Robot System).
See other early Teleoperators and Industrial Robots here.
See other early Walking-wheels here.