Source: The Advanced Handbook of Robotics, Safford.

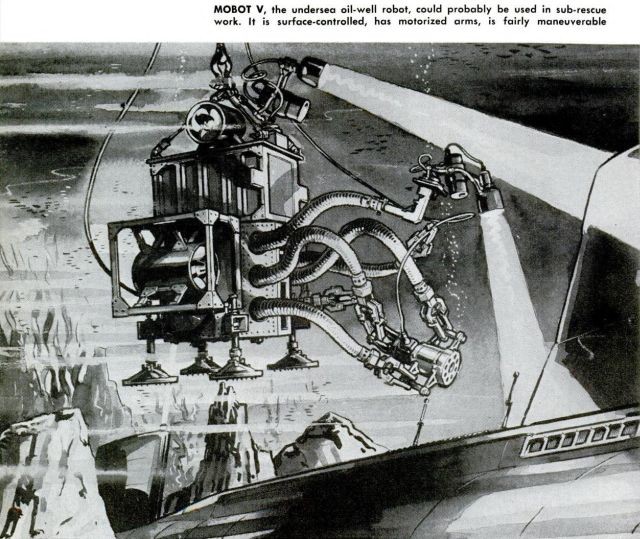
Source: Popular Mechanics, Aug, 1963.
Source: Teleoperator Operations.
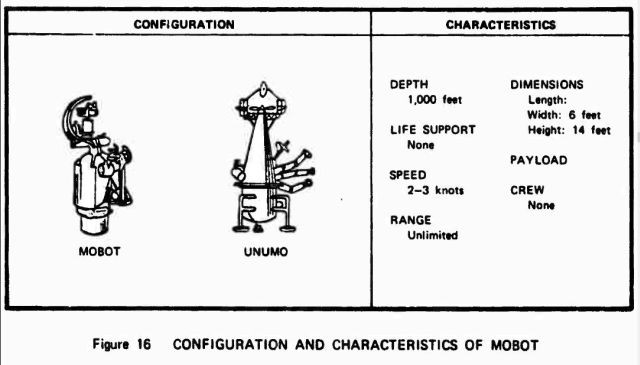
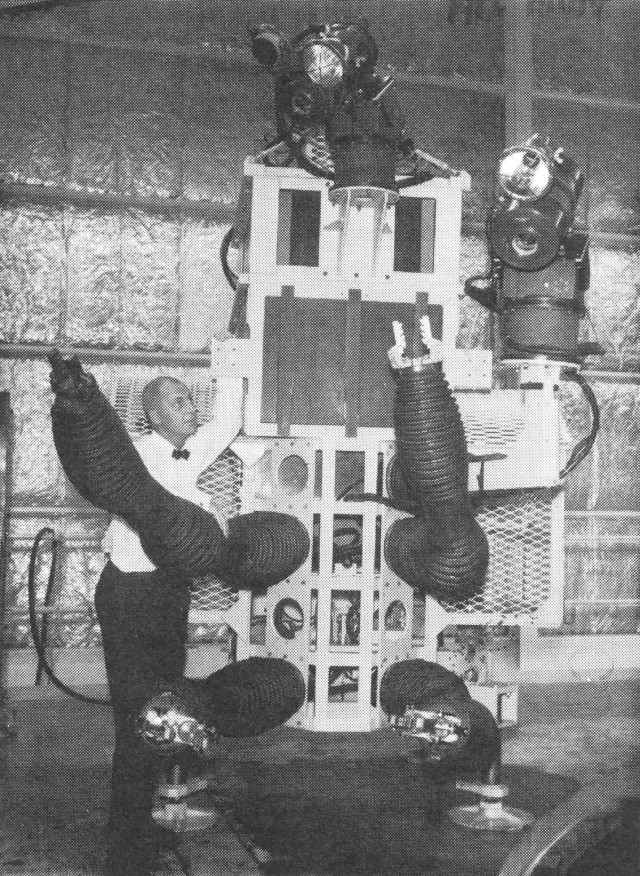
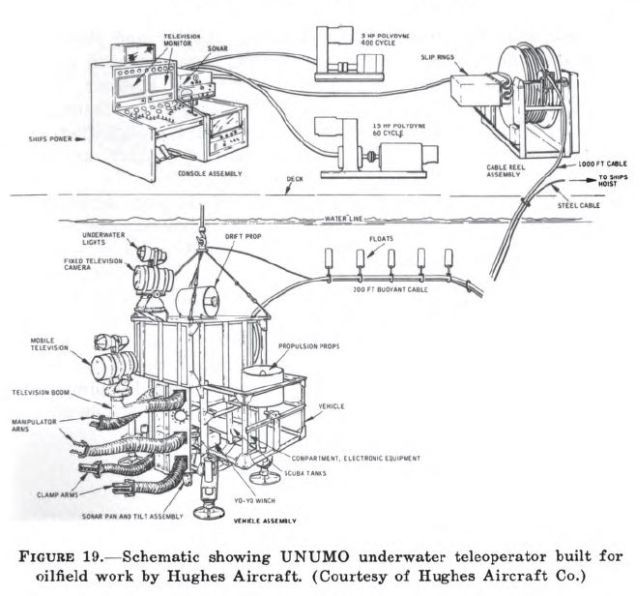
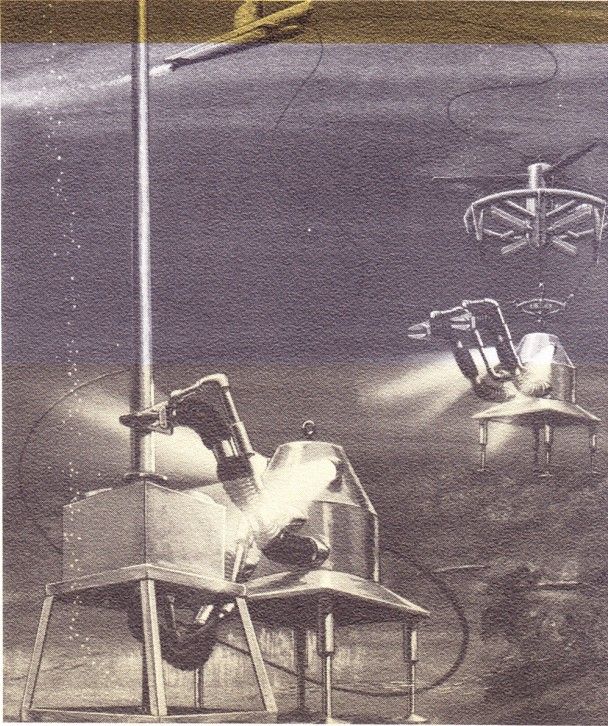
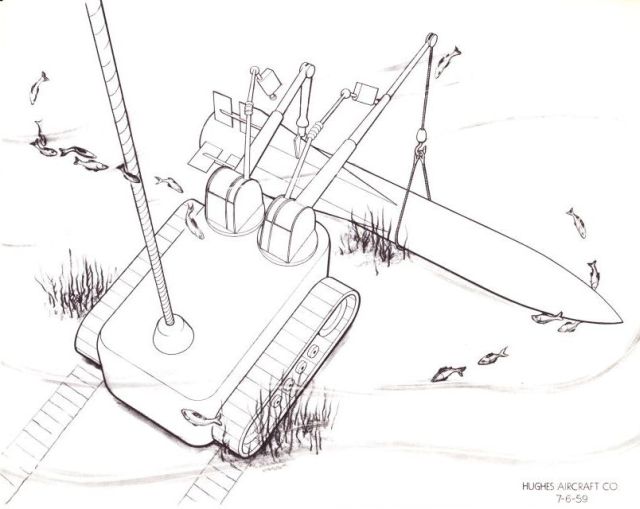
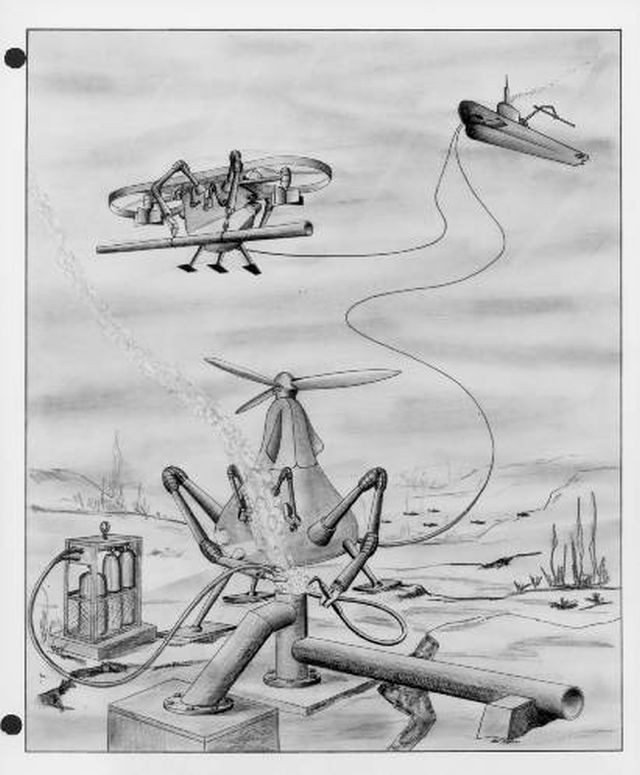
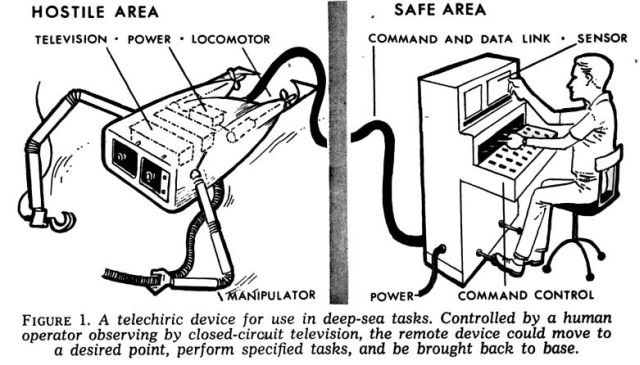
The MOBOT (MObile roBOT) was developed by Hughes Aircraft Company and is used by Shell Oil Company of California as an underwater wellhead manipulator. MOBOT, which is shown in Figure 16, consists of an electro-hydraulic vehicle designed to be lowered into the ocean, land on a track, and operated to insert or break out screws arranged in a horizontal axis. The MOBOT's operations are directed from the surface by means of a closed-circuit television network supported by acoustic sensors. MOBOT, because of the nature of the work it must perform, is very specialized and therefore is limited with respect to the underwater work it can perform. A more advanced version of MOBOT has been proposed but to date has not been constructed. This advanced vehicle called UNUMO is also shown In Figure 16.
Related Patents:
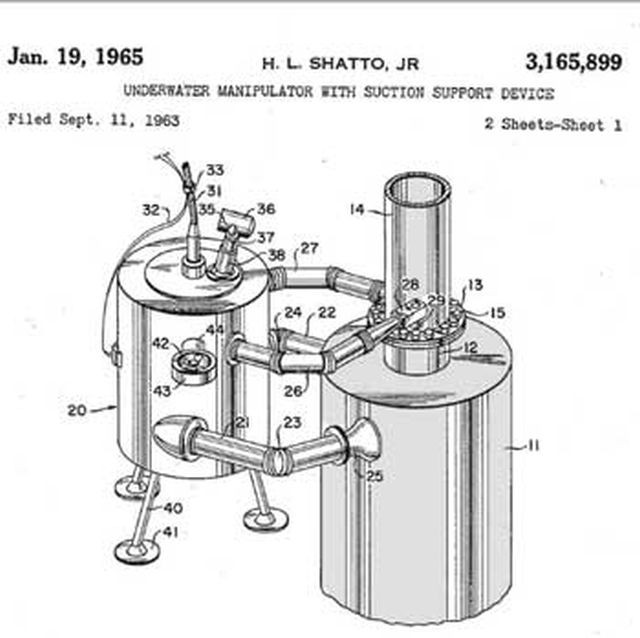
Underwater manipulator with suction support device
Publication number US3165899
Publication type Grant
Publication date 19 Jan 1965
Filing date 11 Sep 1963
Inventor Howard L. Shatto Jr.
Original Assignee Shell Oil Co
This invention relates to apparatus for carrying out operations at underwater installations and pertains more particularly to a method and apparatus for manipulating equipment in the vicinity of, or which are components on, an underwater installation, such for example as an underwater wellhead, an underwater oil and gas production facility, storage facilities, etc.
A recent development at offshore locations is the installation of large amounts of underwater equipment used in producing oil fields and gas fields situated many miles from shore. Many of the wells are being drilled in water up to 600 feet deep, a depth greater than divers can safely work. Thus, in drilling wells, producing wells, installing underwater equipment on the ocean floor, and carrying out work over operations underwater at any of the various ocean floor installations, use has been made of what is known as an underwater manipulator. One such manipulator is described in US. Patent 3,099,316, which manipulator makes use of a track secured to the underwater installation on which the manipulator is designed to be seated and moved thereon. However, many underwater structures may not be provided with a manipulator track at the time they are installed or positioned at an underwater installation so that in the event that it is necessary to make repairs at a later date, a manipulator of the above-mentioned type cannot be readily employed.
Consideration has been given to the use of magnets or electromagnets carried by a manipulator device by which the manipulator device could be secured to an underwater installation during the time it is carrying out a particular operation thereon. However, in order to combat sea water corrosion, there has been a tendency to make more of the underwater equipment of stainless steel on which electro-magnets cannot be used to mount a manipulator device.
It is therefore a primary object of the present invention to provide a manipulator device provided with suitable connector means for securing it to any underwater installation whether made of magnetic or nonmagnetic materials.
A further object of the present invention is to provide a manipulator apparatus for use on component parts of underwater installations, which parts are so large or smooth that it is impossible to engage it by a mechanical gripping device such as a claw arm, hook, etc.
Another object of the present invention is to provide an underwater manipulator device having means for supporting it on the smooth outer wall of a large diameter storage tank or other vessel position on the ocean floor or at enormous depths below the surface of the ocean.
A still further object of the present invention is to provide a remotely controlled manipulator device adapted to move through a body of water and be temporarily secured to a smooth surface of an underwater installation for carrying out the various operations of setting, adjusting, connecting or disconnecting component parts of the underwater installation.
Related patent by Shatto:
Ship Control Apparatus: Publication number US3154854.
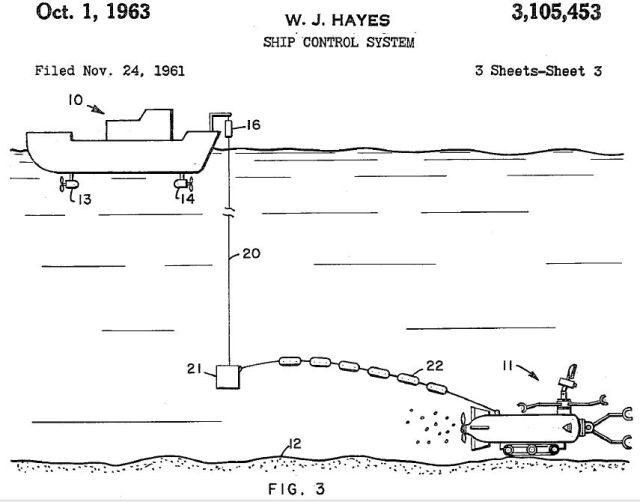
Publication number US3105453
Publication type Grant
Publication date 1 Oct 1963
Filing date 24 Nov 1961
Inventors William J. Hayes
Original Assignee Shell Oil Co
Ship control system
This invention pertains to a method of ship control and more particularly to a method for positioning a mother ship with relation to a submarine vehicle or operator.
In many marine operations it is necessary to have a submarine vehicle or robot operator operating below the surface of a body of water or moving along the floor of a body of Water to perform various operations. These submarine vehicles are free-moving vehicles that are controlled and operated from a mother ship floating on the surface. While the submarine vehicles are controlled from the surface, it is desirable that they be moved without regard to the position of the mother ship. The mother ship is then positioned with relation to the submarine vehicle in order to maintain the proper relationship between the mother ship and the submarine vehicle.
In the past it has been the practice to manually control the mother ship to follow the movements of the submarine vehicle. This method requires skilled personnel to observe the movements of the submarine vehicle and operate the controls of the mother ship so that it can follow these movements. Even with the use of skilled personnel it is very difficult to follow a freely moving submarine vehicle. This results in curtailment of the sub marine vehicles movements in order to permit the operating personnel to properly position the mother ship.
Accordingly, it is the principal object of this invention to provide a novel method of control to permit the mother ship to accurately follow the movements of a submarine vehicle.
A further object of this invention is to provide a novel method for positioning a mother ship to follow the course of a submarine vessel within certain preset limits.
A still further object of this invention is to provide a unique automatic control system for a mother ship to permit it to follow the movements of a submarine vessel wherein the angular deflection of a control line between the mother ship and the submarine vessel is determined, the angular deflection then being used to control the movements of the mother ship.
The above objects and advantages of this invention are achieved by providing a control line between the submarine vehicle and the mother ship. The angular deflection of this control line is then measured in two fixed planes that are oriented with the longitudinal and athwartships axes of the mother ship. These angular deflections are then compared with preset values in order to obtain error signals. The preset values are adjusted to provide the required freedom of movement of the submarine vehicle within a limited radius of the mother ship. The error signals are then vectorially combined and used to operate the thrust producing devices of the mother ship.
Early Hughes Underwater MOBOT concepts
Tyler Priest – University of Iowa
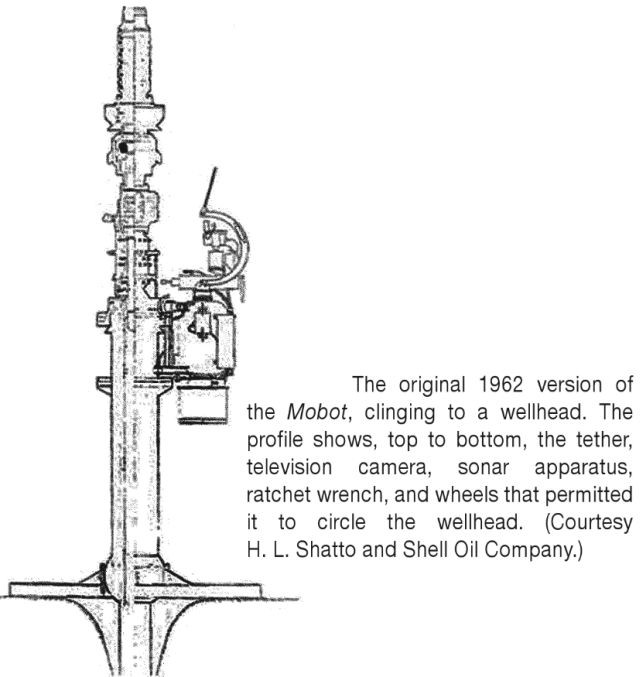
Shatto and other Pacific Coast engineers also developed an experimental underwater completion system that addressed the perceived need for diverless operations in a unique way. Code-named MO, for "manipulator operated," the system featured the use of a free-swimming remote-controlled robot "diver" designed by Hughes Tool, which had a mechanical arm capable of turning lock screws, operating valves, and attaching control hoses and guidelines. Driven by propellers and guided by sonar and a television camera, the so-called "Mobot" could be lowered by a wire cable and attached to the wellhead equipment. It then rode around the wellhead on a circular track to perform its tasks. Source: here.
Partial Transcript of Oral History of Howard Shatto

Title Shatto, Howard
Creator (LCNAF) University of Houston : Houston History Project
Pratt, Joseph A., interviewer
Priest, Tyler, interviewer
Date October 2, 1999
TP: We are conducting this interview of the Offshore Hall of Fame 1999 inductees. ……………..
TP: …….. Let's go back and talk about wellheads.
HS: In January, 1960, I moved to the Marine Division and started the highly secret development of underwater completions for drilling and production. The whole effort was based on the idea that we didn't need and didn't want guidelines. We wanted a guideline-less system. We didn't want to have to use divers because we expected to go to water depths a great deal deeper than divers were able to go, at least at that time. But we needed something like divers. So Bill Bates and Glen Johnson had squirreled up some schemes and sold Ned Clark, who was the executive vice-president of E&P in New York, on the idea of running a parallel development to the one that was going on at the lab in Houston. And I was the Division Engineer for that project starting in January, 1960. What we did was based on some work that Hughes Aircraft had done. They were doing work in atomic energy plants with remotely operated arms, and they had developed some electrically operated arms. So we contacted them and they were willing to work with us under great wraps of secrecy. So we started working on two efforts for underwater vehicles. One was heavy and meant to operate with little railroad wheels around a circular track made around the wellhead, so we could land it on this track using propellers to swim it into position and a television camera to see where we were going.
TP: Is this what you would call Mobot?
HS: That was called Mobot, which was a Hughes Aircraft name for Mobile Robot. That first vehicle also had a scanning sonar that could see where a wellhead was. We could see a wellhead from 1,000 feet away. So we could lower whatever we got out to a wellhead. If we had the leave one, we could lower the Mobot, turn on the scanning sonar, pick up the wellhead, move the ship in that direction, pick it up on television, land the Mobot on the wellhead and use it to operate all kinds of things. Most of it at the start was to lock down or unlock the wellheads, or to lock the blowout preventer onto the wellhead or to unlock it, to override the rams on the blowout preventer, and to operate lock down screws to hold down the blowout protection sleeve. It had a lot of functions. And we even developed ways that it could be used to attach a flowline to the wellhead.
TP: You were working on this in New Orleans or in California?
HS: This was in California. This was an effort that was really in competition with the one going on.
TP: So the marine division in California, you say?
HS: Right, the marine division in California. I was Division Engineer for that. My boss was the division manager, Bill Bates. I had four guys working for me. Ron Dozier was looking at building the ship that became the first dynamically positioned ship. Bruce Watkins was working for me. He was developing the blowout preventer and some of the wellhead equipment. I think he is an honoree tonight. Bill Peterson came to work for us. He was interviewed here just a bit ago. Who else? Ben Gethfort was one. A couple of others.
TP: You were in competition with what shell …
HS: We were in competition with the group that was working in Houston at the Shell lab at Bellaire Research, which was developing underwater completions and had started maybe a year before we did, maybe less. We actually had a wellhead on the ocean floor before they did. It was supposed to be a diverless system. There was a lot of money made by divers working on diverless underwater completions. Ours was meant to work with the robot instead of divers. The system in Houston had guidelines and we were trying to get rid of guidelines.
TP: Was Shell pushing these two developments just to hedge itself, because they saw the technology could possibly be going in two different directions? You had to deal with the fact that the E&P organization on the west coast and east of the Rockies were really distinct entities in some
HS: Very. The people in the Gulf Coast, the ones in Houston said we have to use guidelines. We can't use a robot or anything that depends on television to see or even divers because the water is so muddy from the Mississippi that people can't see out there. We were drilling in the Gulf of Mexico in very deep water and the television worked just fine with ROVs. We were right there working on that development. The old diverless systems are no more. They all worked with ROVs.
TP: To follow up a little bit on Mobot, how was it deployed?
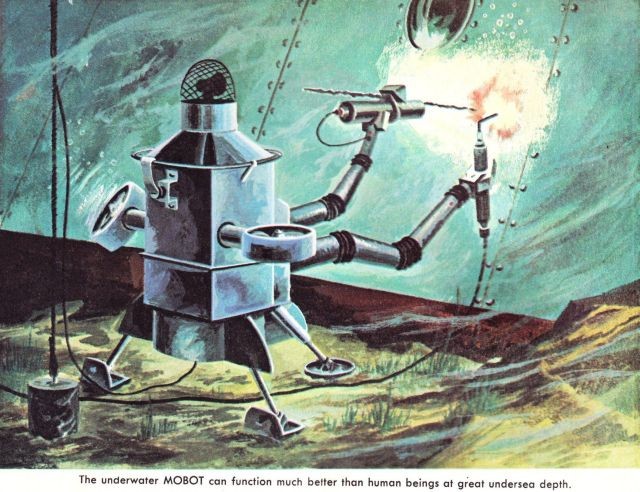
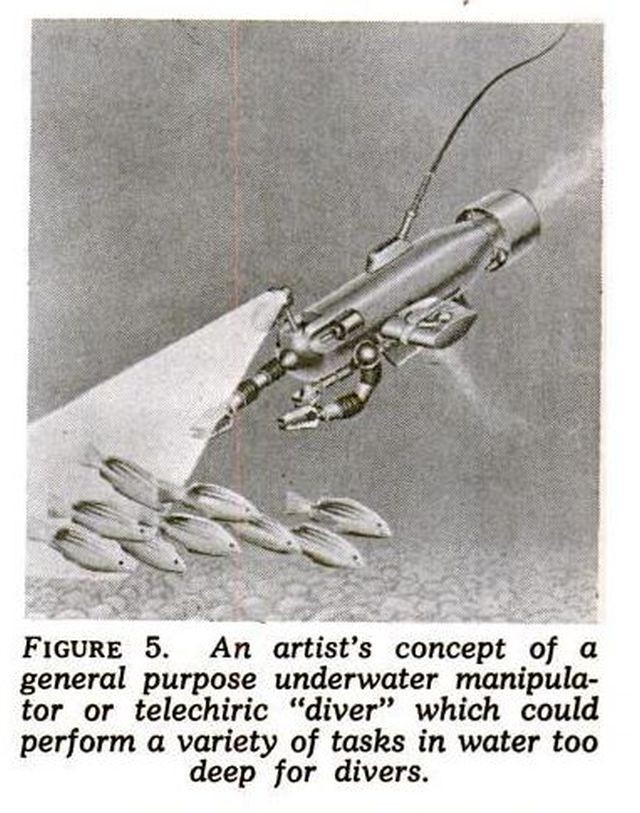
HS: We actually had two of them we developed. One was the wellhead Mobot, and it was the heavy one that landed on a track and went around. It had no arms but it had a hydraulically-operated screw drive with an-inch-and-aneighth hex head wrench socket, which we could put over the nuts on the wellhead and turn them right or left to operate valves or whatever it was we wanted to do. It had a telescopic extension. It could raise or lower the head which included the television cameras. That was the wellhead Mobot. At the same time, we began development of what they called the Unimo, or universal mobot, and its purpose was, more than the wellhead mobot, to take the place of divers to do the kinds of unexpected things that divers could do that the wellhead mobot was really not going to be able to do with just a simple socket wrench. It could do the heavy stuff that you could plan for well ahead of time, but the UNUMO was equipped with arms and was nearly neutrally buoyant. So the idea with it was very much like present day ROVs to be able to swim to where it needed to be to work on something, and then with its arms, to get a hold of it and do what it needed to do -untangle something, tie something, or cut cables or lines, pick up something and then drop or loss, whatever. Things a diver might be able to do.
TP: It seems ahead of its time.
HS: It was. It was in a couple of ways. One was that the reliability of both the systems was very poor. They used vacuum tubes. You are probably too young to remember how often you had to replace those in radios! But they were not very reliable. Our development got superseded when the man in charge of the effort in Houston was promoted to take Ed Clark's place in New York as Executive VicePresident of Production.
TP: McAdams?
HS: No, it was Bert Easton.
TP: McAdams was exploration, right?
HS: Right. They decided that they wanted to combine these two very different systems into one, and in the process, they did away with the robots and mobots and just went to a guideline operated system. It was rather like the one being developed in Houston. That is when I went to licensing and head office and Ron Geer came to be the manager of the group that developed a combined system. He had come out of the Houston effort, so the system ended up looking like the Houston effort. And the ROVs got superseded.
TP: It was ahead of its time, but it still was a precedent. Can you maybe talk about how the industry went from Shell's development of the mobot back in the early 1960s to what they are using today in deep water and the ROVs?
HS: ROVs had just begun to be used for drilling support. A couple of people have used them in shallow water. In 1981, when Shell wanted to drill in deep water on the east coast, we took a contract then with the offshore company who had The Discover Seven Seas. We modified it to go to deeper water — high currents, rough seas, off the Atlantic coast. Up until that time, they had been using a little two-man submarine to find their wellheads if they lost them, and they were their only contact with the ocean floor and on the way down. I thought that could be done much better with ROVs. In the meantime, people had begun development of ROVs for the Navy. Not Honeywell but an outfit in La Jolla.
TP: Lockheed?
HS: No. A little company in Sorrento Valley there developed a little flying eyeball ROV for the Navy. Hydroproducts. I found out about that and decided that Shell ought to be able to use something like that. So we contacted what is now Oceaneering. I saw you talking to Mike Hughes. Mike bought Solis. Solis was the company with Dick Brisby, whom you also ought to interview. Dick Brisby was working on ROVs. They had used them for drilling support for shallower water. They were ready to build one for 7,500 foot water depths, which more than doubled what their capability at that time. They said they could, and I worked with them on developing that system. We put fiberoptics on it, which turned out to be a real boon in the ROV business and was very successful. In fact, we built two of them just for reliability's sake and had both of them aboard. We used one to cannibalize to keep the other one outfitted properly. We put that to work and got rid of the submarine after a lot of haggling. Some people didn't want to see the submarine leave and an ROV come into operation. There were some people who said ROVs had no place in the drilling business, and that there were some companies that said that for many years. But now, they all are happy to use ROVs in their operations.
TP: What was the bias against them? They didn't think they could work?
HS: They thought guidelines would work O.K., and they could use divers if they had to. Of course, we are drilling up where divers can't possibly go now. Citgo held out for many years. I remember I got a call one day from Earl Shanks who was with Citgo at that time. They were drilling in the Gulf of Mexico and had dynamic positioning of one of their rigs. It moved off location and had stretched the riser. They couldn't get loose from the wellhead. He asked me if there was any place I knew of that they could get hold of an ROV in a hurry. They weren't using them at the time. They do now on all their rigs.
TP: You developed something 40 years ago but only really saw it come into use on a widespread basis within the last 10 or 15 years?
HS: Yes. We started that work with dynamic positioning and ROVs in 1960. Dynamic positioning wasn't used on a drilling rig until we did it with the Citgo 445 10 years later. It was another 10 years later or more, in 1981, when we took the Seven Seas to go to very deep water using ROVs. I have been working for the past 12 years. Since I have retired from Shell, I have been working on almost all of the new rigs, doing a lot for the oil companies, some for Shell, BP, Amoco, Chevron, Global Explorer and several others such as Exxon. Vastar has a new rig coming up. And for several of the drilling contractors .
TP: You are working mostly with drill ship dynamic positionings on deep water drill ships?
HS: Dynamic positioning on deep water drill ships, and the use of ROVs and ROV interfacing. I mentioned to you that some of the work I had done with that mechanical resonant energy research outfit in La Jolla turned out to be useful. One of the problems with running ROVs in deep water is that the cages run as a heavy thing on a long cable. Then the ROV comes out of the cage on a tether to do a tour. A heavy cage is used to keep it under the ship so it doesn't drift away in the current. It doesn't give the ROV such a heavy, long thing to work with, I guess. But if you are working with a small vessel and the vessel is going up and down with the wave action and heave, you can get into a resonant condition between the ship and gets too active, then the cable can go slack. And then when the ROV comes down, it will jerk against the plot cable when it becomes taut. The question is how much are the forces induced in the cable and can the cable stand that kind of a beating? The work I had done with the resonance systems seemed to fit in perfectly. I could analyze that kind of stuff. Piece of cake!
TP: Looking back at all the innovative things that you have been involved in, what was the source of your inspiration for coming up with a new concept, or applying things to certain areas that no one had thought of before?
HS: The need was almost always there, and it seemed when we started in 1960, everything we wanted to do was new. Nobody had done it before. So we got a lot of patents. I ended up with 35 patents in the U.S. and Canada, and a lot of them are also filed overseas in various countries. So the need is there. Once the need is there, if you can just keep thinking, a solution somehow or other will come to you. Sometimes, a lot of ways arise that it could be done. The concept for dynamic positioning control, to solve the vectors that needed to be solved so you could direct each of two positioning thrusters, came while I was on the freeway. I had been thinking about it. I had thought up all kinds of wrong ways to do it — ways that would not be right. All of a sudden, driving down the freeway one sunny afternoon, the answer just suddenly was there. And it makes goose bumps stand up when it happens.
TP: It seemed like Shell was very good at both the theoretical side in basic research and communication between the people who were doing pure research and the operating side — being able to get this feedback from what is happening in the field and developing things they need for the field.
HS: It was an exceptional time when everything we thought of was brand new. Communication, in a way, was shut down because . . .
TP: Because of the secrecy?
HS: They had taken us out of the telephone book. People thought we had died or gone away. But we did communicate with our competitors in the research group in Houston. We were reasonably free to do that, although the systems that we were developing were very much in competition. We did communicate among each other pretty well. ……….
See other Hughes Mobot-related posts here.
See other early Underwater Robots here.