Donald F. Melton
MECHANICAL DIVISION
GENERAL MILLS. INC
MINNEAPOLIS, MINNESOTA
INTRODUCTION
Remote-handling systems can be defined as combinations of equipment the primary purpose of which is to move items relative to each other in a controlled environment. The system is includes not only the actuators and structures required for the physical tasks to be performed, but also in viewing, sensing, control, and power systems necessary for operation. In a broad sense, this definition includes the overall vehicle system.
There undoubtedly well be complete space vehicles devoted entirely to remote-handling missions. In a more limited sense, the remote-handling system will be a subsystem integrated into the overall system in terms of power supply, communication and control links, and compatible configuration.
The items to be handled may be separable remotely from the handling equipment — as, for example, a powered tool-or may be permantly attached to it-for example, an integrated television camera.
Remote can be considered to be any location beyond the human operator’s reach. Remote-handling required where the operational environment is not suitable for occupancy or when the objects to be handled and the distance they are to be moved are beyond the force and reach capabilities of a man.
The environmental conditions in space, as well as on the moon and most, if not all, of the planets,
are such as to make direct human contact impossible. Remote-handling equipment will be required.
The potential applications for remmoe-handling equipment in space are many, and can be said to include any of the manipulative tasks done directly by a person under normal conditions.
ARM-HAND WORK TASKS
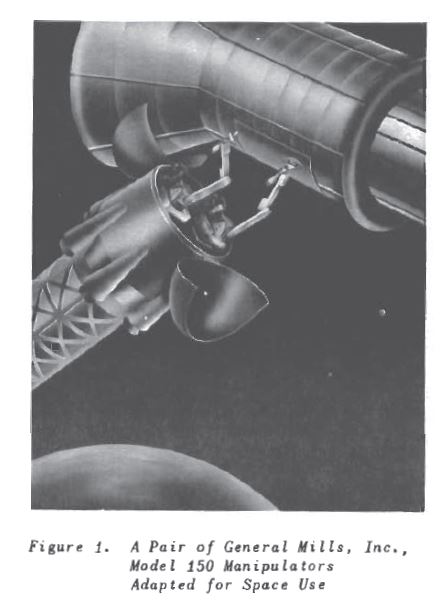
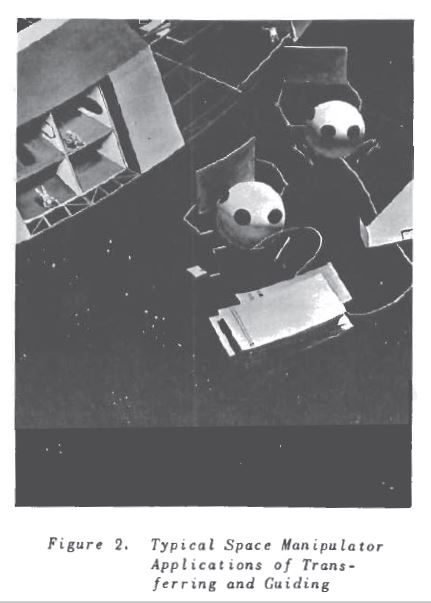
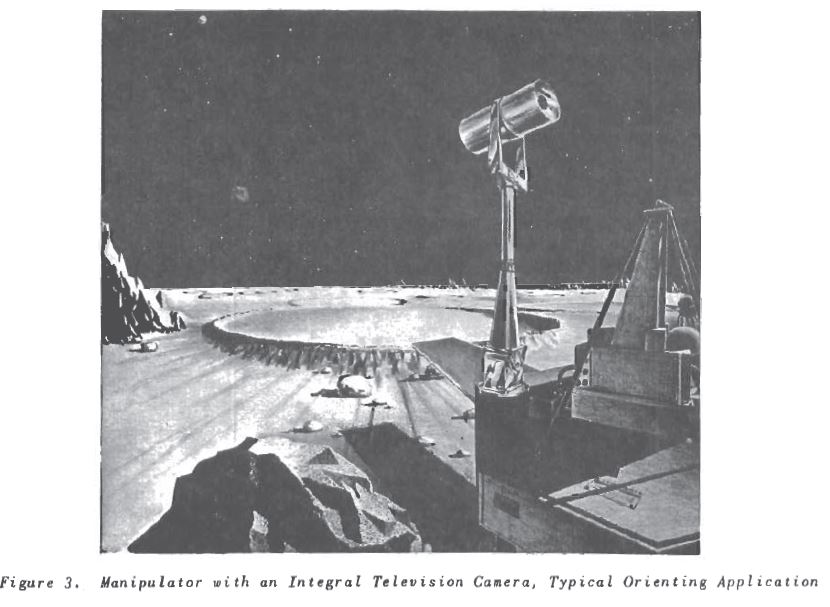
A listing of specific space tasks would be long and would be incomplete within a short time, as new missions are determined. Instead of this detail listing, the work tasks normally done by a person’s arm and hand, which will probably be performed by remote-handling systems in space (see figures 1,2, and 3), can be categorized basically into:
a. Grasping and holding— e.g., grasping and holding one space vehicle from another (figure 1)
b. Transferring -e.g., transferring a power supply from a support vehicle to an operational vehicle (figure 2)
c. Orienting -e.g., orienting a television camera to view an approaching object (figure 2)
d. Guiding —e.g.. guiding a cutting device to gain entry into another object (figure 2)
e. Applying of forces and torques—e.g., applylng a force to insert or pull shear pins, or a torque to tighten or loosen bolts in the orbital assembly of a space station (figure 1)
f. Sensing of forces, temperature, roughness, hardness, etc. —e.g., sensing the hardness of a foreign object by means of a manipulator-held sensing device (figure 1)
ENVIRONMENTAL CONDITIONS
The design considerations important to remote-handling equipment for use in space include careful analyses of and provision for the environmental conditions to be met in space as well as during prelaunch and launch conditions.
Temperature
The temperature at which the equipment will operate in space is determined by the radiation balance of the equipment, the vehicle on which it is mounted, the sun, and any other mass close enough and with sufficient temperature difference to be significant, as well as any heat generated within the equipment. “Hot” and “cold” radiation zones in the spherical angle surrounding the equipment can be used to advantage. Selective coating of the external surfaces can be used to control the internal temperature. Lunar- or planet-based operation imposes a more severe problem than in space because of the strong ground effect.
A directed or collimated thermal antenna can be of value in selecting desirable radiation zones. Thermal insulation is advantageous in reducing fluctuations in temperature as the radiation field changes.
With existing high- and low-temperature components and materials, and with proper design for temperature regulation, satisfactory operation can be obtained. In special cases, materials can be selected to operate satisfactorily without special temperature-control devices.
Pressure
The high-vacuum operation encountered poses a considerable design problem in providing suitable bearings and mechanisms and the lubrication for them. Three approaches to this problem are: (a) to seal the housings in which the bearings and mechanisms are contained to enable conventional lubricants to be used, (b) to use low vapor-pressure lubricants which will operate in the vacuum for the required time, and (c) to use bearings and mechanisms that require no lubricants.
High-Energy Radiation
The radiation levels as established to date do not pose serious problems.
Micrometeorite Collision
The impact and erosion levels do not appear serious. The change in emissivity of surfaces used for temperature control, due to erosion, can be anticipated and provided for.
GENERAL DESIGN PRINCIPLES
Reliability
The reliability requirement is of prime importance and is best obtained by basic simplicity. Complex designs must be avoided.
Weight and Efficiency
Because of the high cost per pound of placing a system in space, the weight must be a minimum commensurate with the high reliability required. The power required to operate the remote-handling equipment, and therefore chargeable to it, can be expressed in terms of weight, either as pounds per watt-hour in the case of energy-storing or fuel-consuming devices, or as pounds per watt-hour for regenerative supplies such as solar cells. High efficiency throughout is required to minimize the power-weight requirement.
Source: “Survey of Remote Handling in Space”, D. Frederick Baker, USAF, 1962
In the 1950’s, General Mills, yes, the American breakfast food and cereal company, built materials handling equipment. Their success and novel designs led them to build remote-handling manipulators for the then new nuclear industry. Some senior engineers spun off this division to become Programmed and Remote Systems (PaR Systems). Their success and expertise was such that they were invited to propose space manipulators. Â I will later add some posts on Gen Mills and PaR Systems regarding their still successful line of remote-handling manipulator arms.
Trivia: Image in figure 2 above seems to have been borrowed from an illustration from the children’s book “Space Flight The Coming Exploration of the Universeâ€, published by Golden Press, New York, 1959 seen down the bottom of this post here.
See other early Teleoperators here.
See other early Lunar and Space Robots here.