Text and some images sourced from here – http://www.spawar.navy.mil/robots/land/robart/robart.html
This link also contains other links to ROBART information, not covered here.
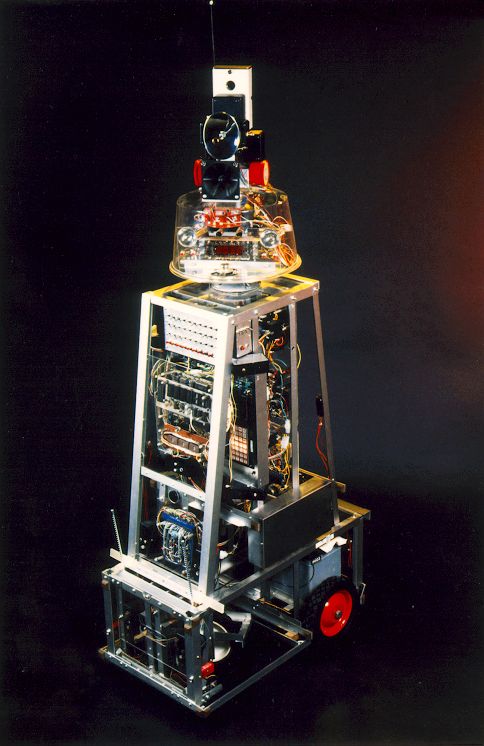
ROBART-I was Bart Everett‘s thesis project at the Naval Postgraduate School in Monterey, CA. and one of the very first behavior-based autonomous robots ever built. The navigation scheme provided a layered hierarchy of behaviors (see Table below) that looked ahead for a clear path (high-level), reactively avoided nearby obstacles (intermediate-level), and responded to actual impacts (low-level). A basic tenet of this strategy was the ability of certain high-level deliberative behaviors to influence or even disable the intermediate and low-level reactive behaviors, such as when docking with the recharging station, for example.
|
LEVEL |
BEHAVIOR |
RESULTING ACTION |
|
High |
Radar Dock |
Look ahead for encroaching obstacles Look for opening in forward hemisphere Home in on recharging station |
|
Intermediate |
Wander |
Seek clear path along new heading |
|
Low |
Proximity Reaction Impact Reaction |
Veer away from close proximity Veer away from physical contact |
ROBART I’s assigned function was to patrol a home environment, following either a random or set pattern from room to room, checking for unwanted conditions such as fire, smoke, intrusion, etc. The security application was chosen because it demonstrated performance of a useful function and did not require an end-effector or vision system, significantly reducing the required system complexity. Provision was made for locating and connecting with a free-standing recharging station when battery voltage began running low. Patrols were made at random intervals, with the majority of time spent immobile in a passive intrusion-detection mode to conserve power.
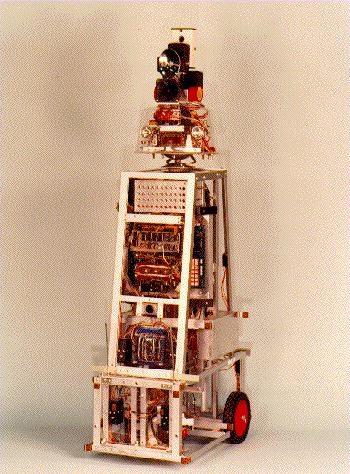
Being a prototype, the images below will show variances as it evolved.
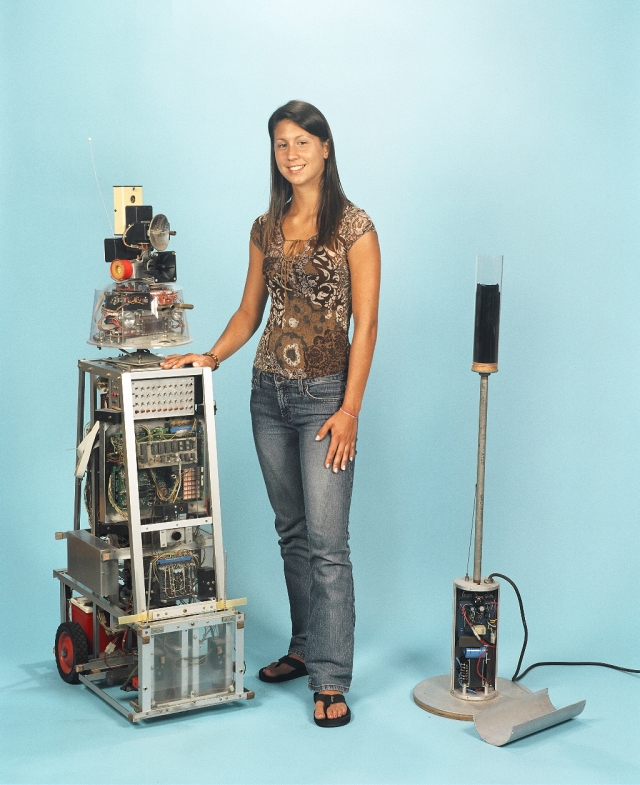
ROBART-I with re-charging station (and Lisa!)
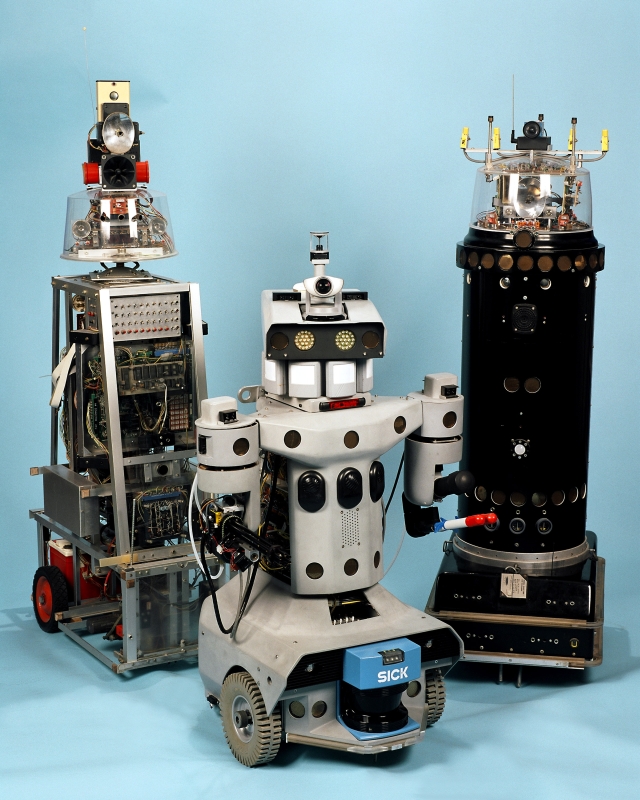
ROBART-I ended up being the start of a family…
See other early Humanoid Robots here.
who is lisa?