
Translated from Russian here as at 2011.
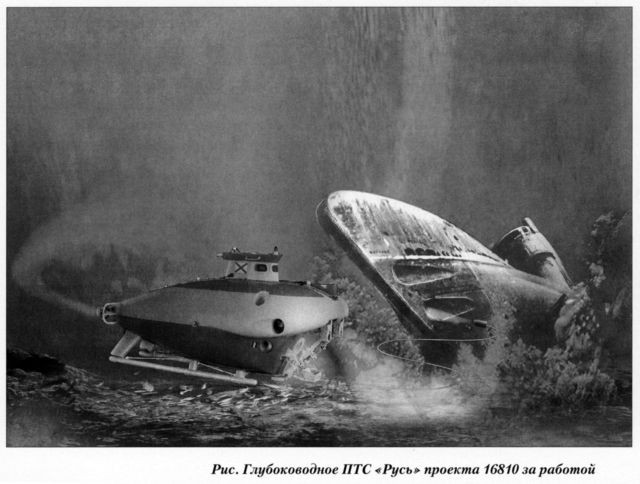
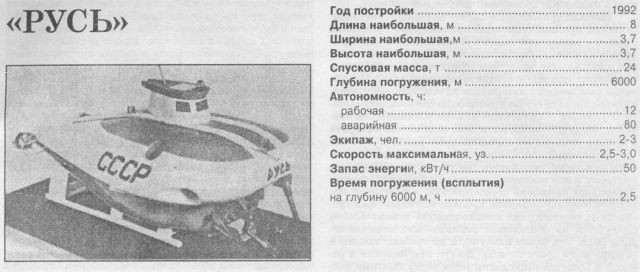
pr.16810 "Rus" [пр.16810 "РуÑÑŒ"]
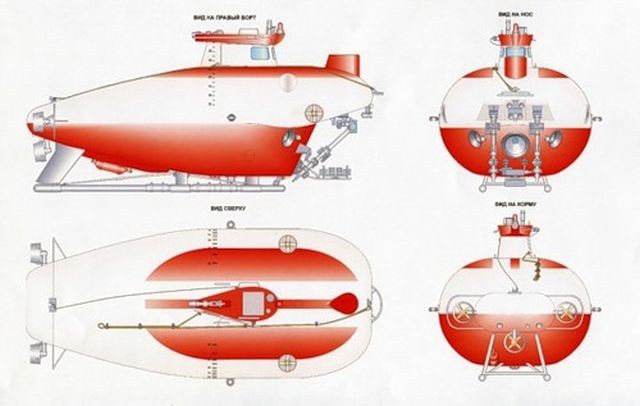
pr.16811 "Consul" [пр.16811 "КонÑул"]
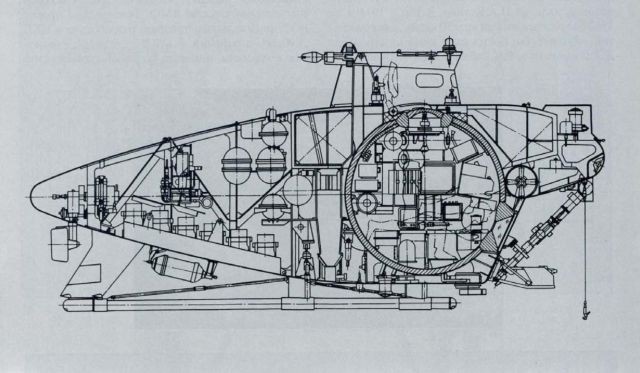
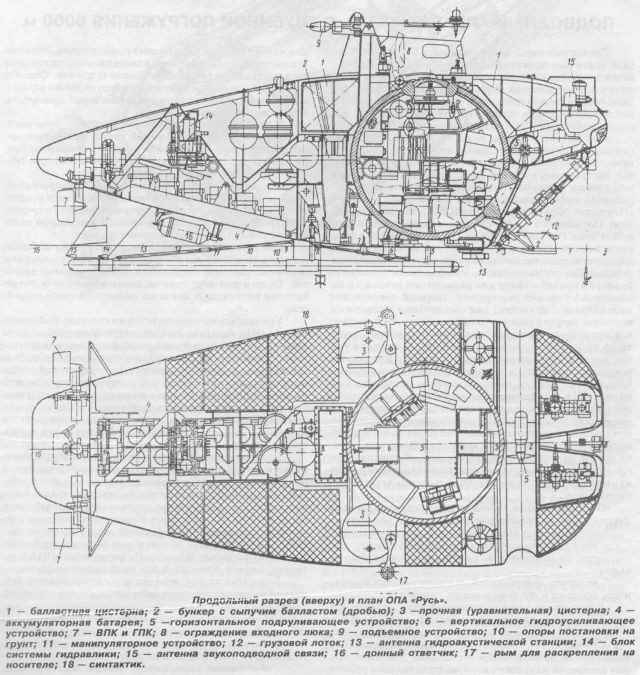
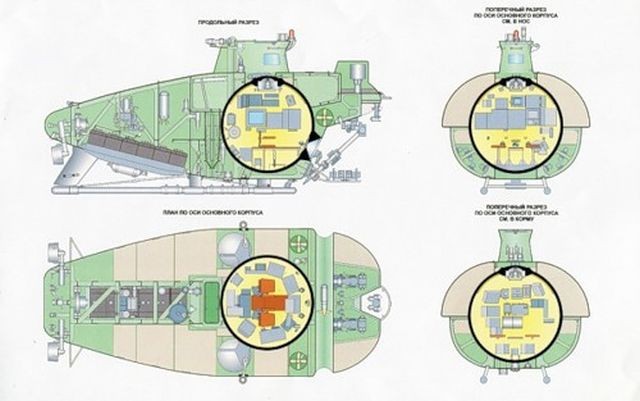
Manned deep-propelled underwater vehicle / ship 3 rank – a standalone deep-sea vehicle. The project unit developed SPMDB "Malachite" (St. Petersburg). Design submersibles on the instructions of the Soviet Navy and is designed to dive to a depth of 6000 m pr.16810 started in 1984 SPMDB "Malachite" under the leadership of V.G.Markova (1993 – E.M.Razumihin) . The design of the unit took part in the Central Research Institute of Structural Materials "Prometheus", NGO "Screw" CRI "Aurora" CRI "Morphyspribor" NGO "Nord", NGO "Proletarian plant" and the NGO "Electrical Equipment". Technical project pr.18810 device developed by order of the Soviet Navy led V.G.Markova in 1987. At the same time a draft apparatus with improved performance characteristics (future pr.16811). In 1989 he released a working design documentation of the adjusted pr.16810. In 1989, the same correction is made sea exploration project to the requirements of the Maritime Register of the USSR and the working design documentation released pr.16811. Customer second unit (pr.16811 "Consul") until 1992 – the Ministry of Geology of the USSR, since 1992 – Rosnedra.
Preparation for construction of machines and pr.16810 pr.16811 started on the "Admiralty Shipyards" in 1989 and in 1991-1992 respectively. The official laying of the unit AC-37 "Russia" pr.16810 held on 1 June 1992 in the workshop â„–12 (MSP-125 – a site of deep-sea vehicles) "Admiralty Shipyards". The test apparatus AC-37 "Russia" started in 1998, launching made May 20, 1999 In 2001, the unit made the first dive in the Baltic Sea. Factory performance and state testing apparatus "Russia" held in the Baltic Sea, which is not allowed to carry out tests with a maximum depth of immersion. During state testing was performed checking emergency surfacing device with impact cap shunting the ballast hopper (iron shot) and returns the device to the base setting to trim weights. Such tests are carried out for the first time. The Commission took experienced deep Autonomous unit "Rus" into trial operation in the Russian Navy in the Baltic Sea with limited depth reached on state tests. In accordance with the decision Glavnokoma Navy and director of the Russian Shipbuilding Agency â„– 743/5/1245 on November 3, 2000 the unit experienced dive to a depth of 6,000 meters was carried out. The same decision was made by the State Commission proposal to perform the modernization work on the unit "Rus", and on board the carrier pr.141 followed by deep-sea diving in the 3000 m and 6000 m in the Atlantic Ocean.
In 2001-2005, unit AC-37 "Russia" is being upgraded, the possibility to bring it pr.16811. In 2005, the unit "Rus" to dive to a depth of 3600 m (ist. – Burilichev A., interviews). After making the deep sea diving in December 2006 in the Azores unit in February 2007 adopted by the Russian Navy.

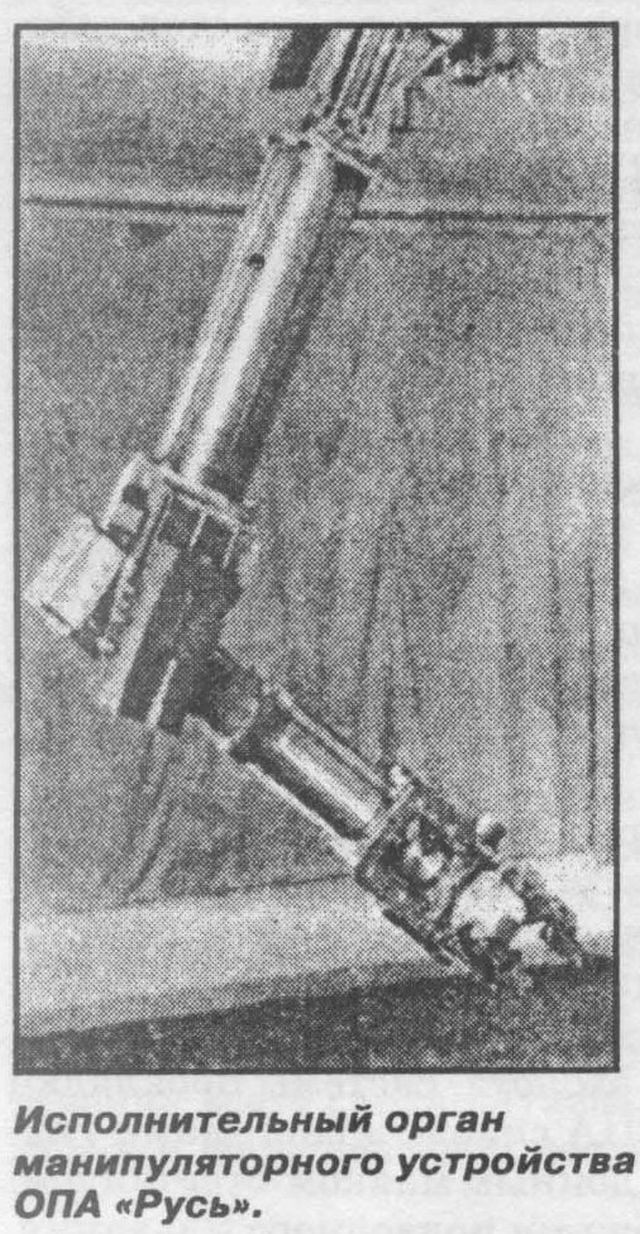

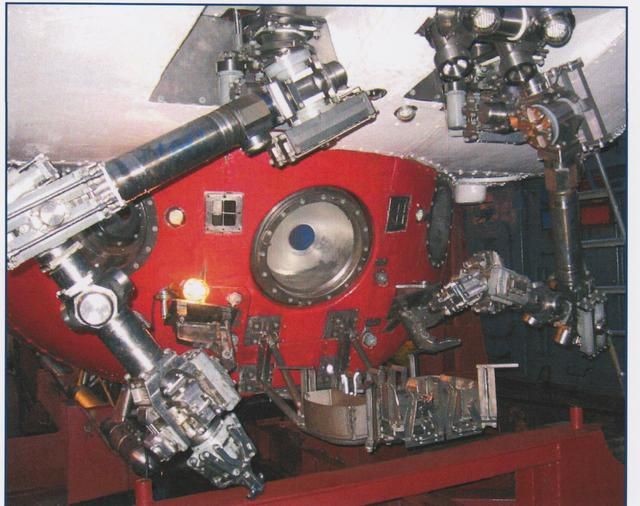
[translated] Devices equipped pr.16810 and pr.16811 unique complex manipulators. The structure of the manipulator system includes two executive body made of titanium, remote control and two defining authority. Manipulative complex designed by the Department of SM4-2 Bauman MSTU, head of works – V. Chelyshev.


Consul pr.16811 1989.


See other early Underwater Robots here.