
MIR (SUBMERSIBLE)
Mir is a self-propelled Deep Submergence Vehicle. The project was initially developed by the USSR Academy of Sciences (now the Russian Academy of Sciences) along with Design Bureau Lazurith. Later two vehicles were ordered from Finland. The Mir 1 and Mir 2, delivered in 1987, were designed and built by the Finnish company Rauma-Repola's Oceanics subsidiary. The project was carried out under the supervision of constructors and engineers of the Shir-shov Institute of Oceanology. The vessels are designed to be used for scientific research. They might also be used to assist in submarine rescue operations, although they do not have the capacity to take anybody aboard when underwater. The carrier and command centre of both Mir submersibles is the RN Akademik Mstislav Keldysh. Currently the two Mir units are operated by the Russian Academy of Sciences. The MIR submersibles can dive to a maximum depth of 6,000 metres (19,685 ft). This makes them two of only seven manned submersibles in the world that can dive beyond 3,000 metres (9,843 ft), the others being the US submersibles Alvin, Sea Cliff and Deepstar 20000, the Japanese owned Shinkai and the French owned Nautile. Up to 98 % of the world's oceans are no deeper than 6,000 metres. All these deep-ocean submersibles utilize three-person crews. Traditionally, the personnel sphere of a deep sea submersible is manufactured of titanium plates that are welded together. On Mir, the personnel sphere is made of a maraging steel alloy that has 10 % better strength/weight ratio than titanium. This alloy contains about 30 % cobalt and smaller amounts of nickel, chrome and titanium. Two hemispheres were made by casting and machining, and then bolted together, thus avoiding welded joints. The resulting construction is close to the density of water, thus making it easier to move in different depths. Additional buoyancy is provided by 8 cubic metres (280 cu ft) of syntactic foam. Unlike other Deep Submergence Vehicles that use iron ballast to reach the ocean floor, the buoyancy and depth is adjusted by ballast tanks.
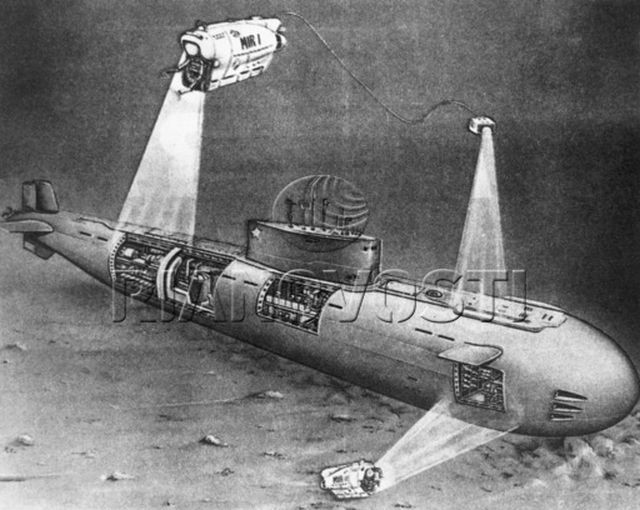
Early illustration of MIR-1.
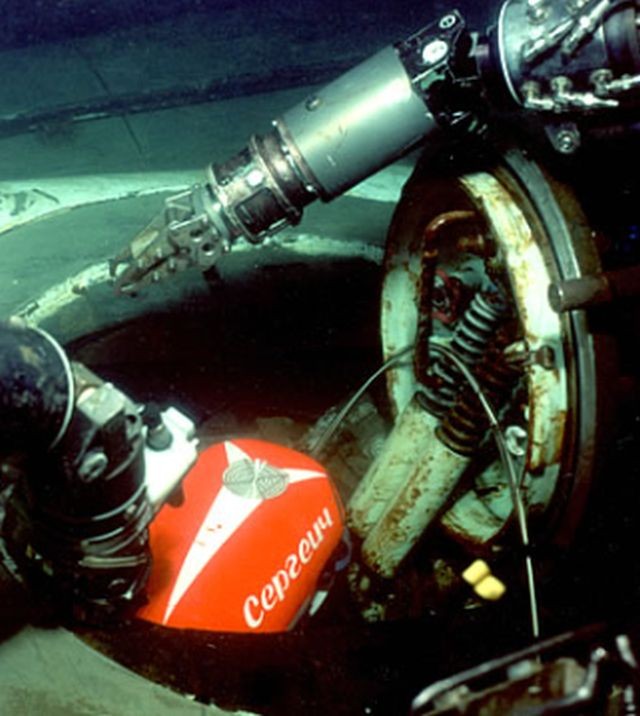
Manipulator arm in action.
Translated from Russian with errors from here.
Research PA "Mir-1" and "Mir-2"
In 1987, the USSR Academy of Sciences commissioned the Finnish company Rauma-Repola, the Institute of Oceanology. PP Shirshov, two deep-water apparatus. Subsequently, the PA received the names of "Mir-1" and "Mir-2". Oversaw the creation of devices, Professor, Doctor of Technical Sciences, Igor E. Mikhaltsov. Submersibles were built in less than a year.
To carry the "world" in the same 1987 in Finland was converted research vessel "Akademik Mstislav Keldysh".
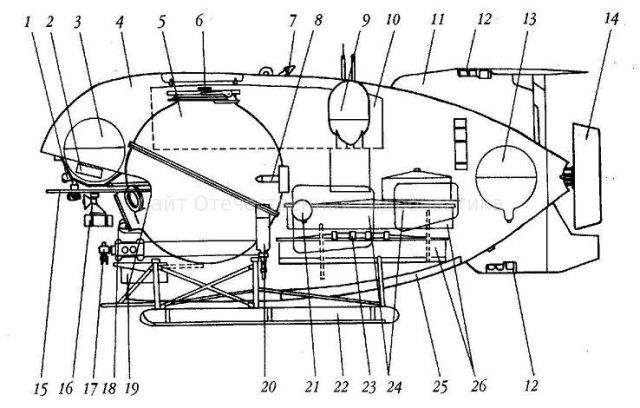
MIR – scheme for the site
1 – sonar; 2 – flash; 3 – bow ballast sphere; 4 -Easy housing; 5 – robust housing; 6 – Sun; 7 – eye; 8 – lateral thrusters; 9 – Emergency buoy; 10 – the main ballast tanks; 11 – stabilizer; 12 – hydrophones; 13 – aft ballast tank; 14 -marshevy mover; 15 – rotating rod; 1b – swing frame; 17 -manipulator; 18 – sensor data acquisition system; 19 – bunker samples; 20 – hopper with shot; 21 – cylinder high pressure air; 22 – skiing; 23 – pump sea water; 24 – access covers; 25 – Reset of the outer hull; 26 – storage boxes.

Deep-sea testing of the "MIR" is held in the Atlantic Ocean, with the Mir-1 sank to a depth of 6170 meters, and the Mir-2 at 6120 meters.
Robust housing with a diameter of 2.1 meters and ballast sphere made ​​of nickel steel with a yield strength – 150 kg / mm ² habitable sphere has an inner diameter of 2.1 meters. The central window has a diameter of 200 mm, and two lateral – 120 mm.
Stainless steel frame connects four spherical body in a single structure. The upper part of the reinforced frame ends with a lifting device, which fits with the capture of a cable tripping unit (SPU). At the bottom of the frame rests on skis syntactics and fiberglass.
Ballast spheres can accommodate about a ton of water. Lightweight body in the form of elongated droplets covers the entire inner frame and the stuffing machine. The halves of the housing vykleeny syntactics and Kevlar. In the stern is set empennage, wing it turns on a horizontal plane, allowing the exchange rate stabilization. Under the lightweight body are the main ballast tanks, blown with compressed air.
Screw the propulsion in nozzles, rotating hydraulic motors. Nozzle main engine rotates within ± 60 °, and the gondola on-board engines are turned in the range + 110 ° + -60 ° lateral thrusters. Through aft propulsion unit speeds up to 5 knots. Side thrusters provide a speed of about 1 knot.
The energy complex consists of 2 groups of nickel-iron battery capacity of 700 A / h, 120V motors and nourishes the 1st and 2nd hydraulic systems, outdoor lighting, flash, communications equipment, navigation, measuring sensors.
Emergency nickel-cadmium AB in the field of manned feeds motor third hydraulic system, which is used for emergency relief movers, hands of manipulators, the lower the battery box and emergency buoy with a rope guide.
Solid ballast – nickel fraction – held electromagnets in fiberglass silos.
Life support system PA consists of cassettes with lithium hydroxide or sodium, oxygen tanks with regulators and flow control devices for the gas medium.
From 1987 to 1991, "MIR" to board the vessel "Mstislav Keldysh" dive in the Atlantic Indian and Pacific Oceans.
In 1989-98 "MIR" tracked state, lying at the bottom of the Norwegian Sea at a depth of 1700 meters submarine "Komsomolets".
In 1997, on board the "Worlds" were filmed footage of the film "Ghosts of the Abyss. Titanic. "
In 2000, on board the "MIR" was surveyed, lying on the ground SSGN K-141 "Kursk".
In 2002, "Worlds" sank to the bottom of the Atlantic lying on the German battleship "Bismarck"
August 2, 2007 during the expedition "Arktika-2007" to "Worlds" for the first time in the world was reached the bottom of the Arctic Ocean at the North Pole, where he placed the Russian flag and a capsule with a message to future generations.
In 2007, the Institute of Oceanology. PP Shirshov due to inadequate funding of the Institute gave support vessel "Akademik Mstislav Keldysh" in the charter.
In 2008, "MIR" examined the status of Lake Baikal.
In 2011, with the help of the "world" to explore the underwater world of Lake Geneva. After this expedition sets deposited in the Kaliningrad Museum of the World Ocean.
December 17 was moved aboard the carrier submersibles "Amber", owned by Google.

Paper model of MIR-2.
See other early Underwater Robots here.