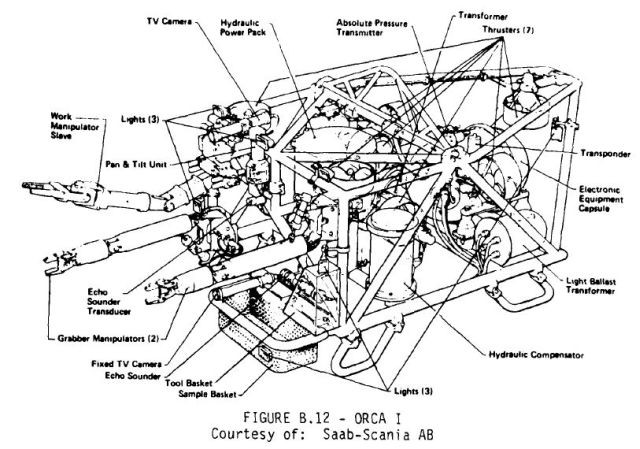
ORCA 1
(Oceaneering Remote-Controlled Arms)
DEPTH: 2,300'
DIMENSIONS (LxWxH): 11.5' x 6.6' x 6.6'
WEIGHT: 6,000 lbs
SPEED: (Max Surface) NA
(Max Current) NA
STRUCTURE: Rectangular, open metal framework encloses and supports all components. Syntactic foam blocks mounted on top of frame.
PROPULSION: Seven 6KW hydraulic thrusters provide maneuvering in all translational and rotational directions.
INSTRUMENTATION: Two CCTV: one fixed camera with wide-angle lens, one p&t mounted with zoom lens, four mercury vapor lights, two halogen lights, stereo still cameras. Three manipulators: one master-slave force feedback unit (GE Arms) with lift capacity of 65-100 lbs, grip force of 247 lbs, reach of 5'6"; two grabber manipulators capable of lifting 175 lb at full reach (6'3"); tool rack, echo sounder, two directional hydrophones, transponder, gyro, depth_meter.
POWER REQ: 440VAC, 60Hz; 380V, 50Hz.
SHIPBOARD COMPONENTS: Control console and computer, transformer, launch/ retrieval system.
SUPPORT VESSEL REQ: Deck space: 538 to 861 sq ft.
CREW: NA
TOTAL SHIPPING VOL: NA
TOTAL SHIPPING WEIGHT: 12 tons plus launch/retrieval device BUILDER: Saab-Scania, Aerospace Division, Linkoping, Sweden
General Electric's Diver Equivalent Manipulator System (DEMS) was employed on a tethered unmanned submersible called Oceaneering Remote Controlled Arms (ORCA), and on a Oceaneering's Ocean-ARMS. See here for more information on the G.E. DEMS.
See other early Underwater Robots here.