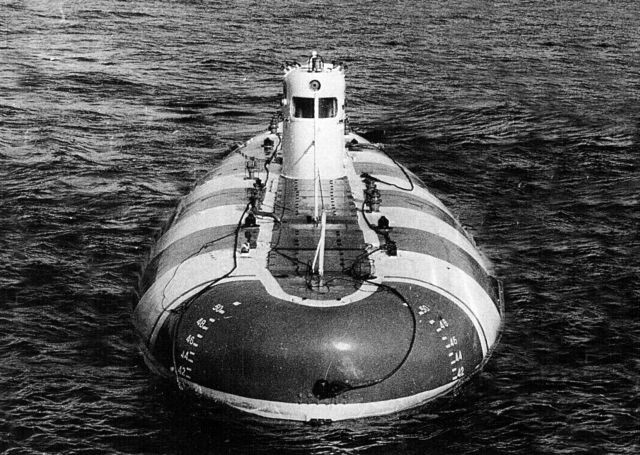
Search PA pr.1832 "Search 2" [ПоиÑковый ПРпр.1832"ПоиÑк-2"]

Manipulator arms are folded underneath hull.
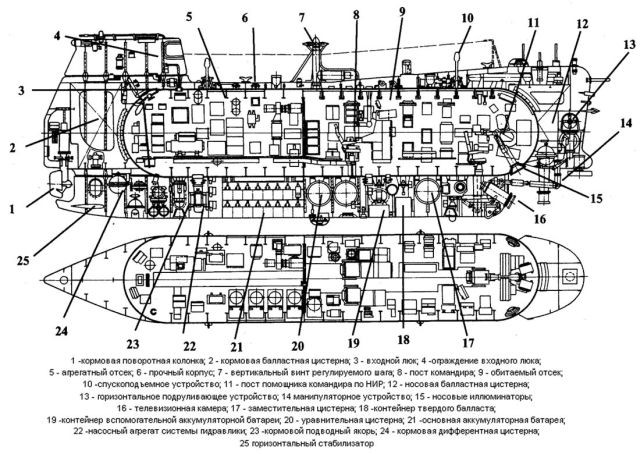
1 – pen horizontal steering; 2 cowl steering column the sustainer engine; 3 – drive steering column; 5 – aft main ballast tanks; 6 – the hatch; 7 – pilot house; 8 – ring cargo unit; 9 – service module; 10 – Guard rails; 11 – vertical thruster; 12 – BTF bow; 13 – lag bow thruster; 14 – Manipulator arm; 15 – porthole assistant commander for research; 17 – replacement tank; 18 – hard ballast; 19 – supporting AB; 20 – remote commander; 22 – equalizing tank; 23 – the main AB; 24 – aft trim tanks.
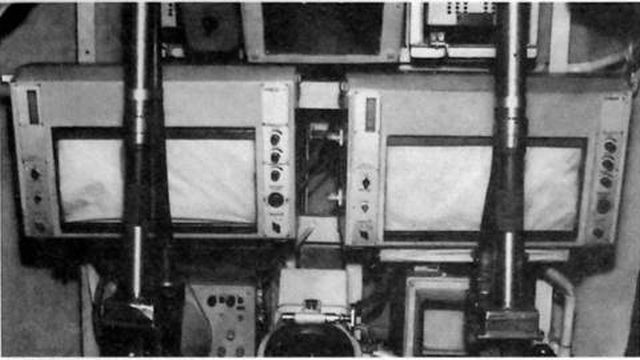
ПоÑÑ‚ помощника по ÐИРголовного “ПоиÑка-2”
The post of research assistant head " Search 2"
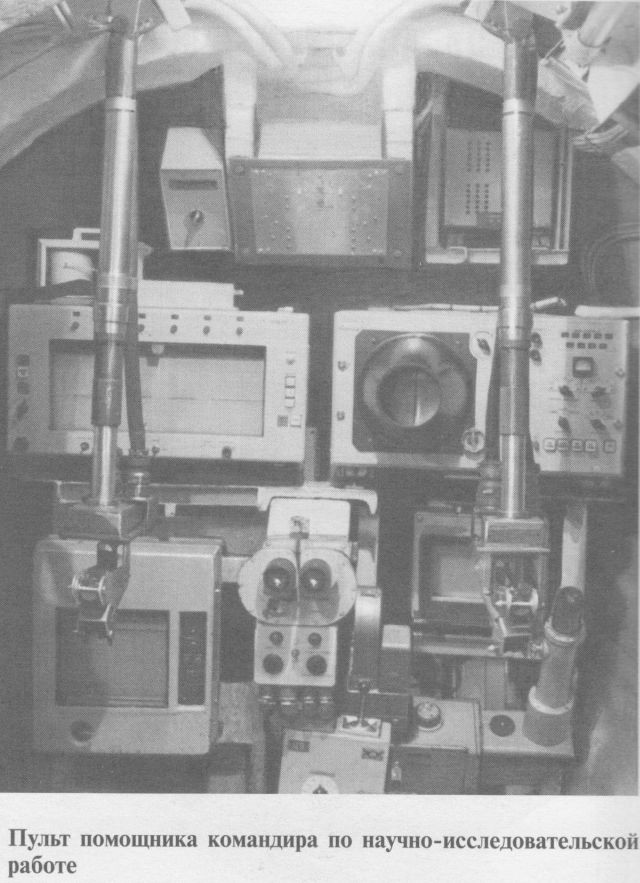
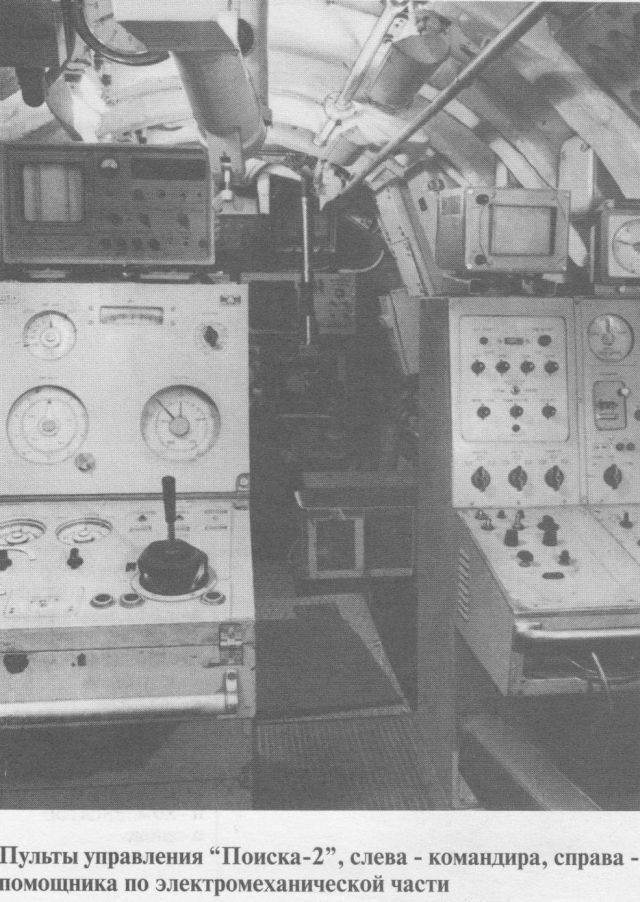
Пульт помощника командира по научно-иÑÑледовательÑкой работе
Remote assistant commander for research work.
Interesting that the layout is more conventional to those used in the nuclear industry.
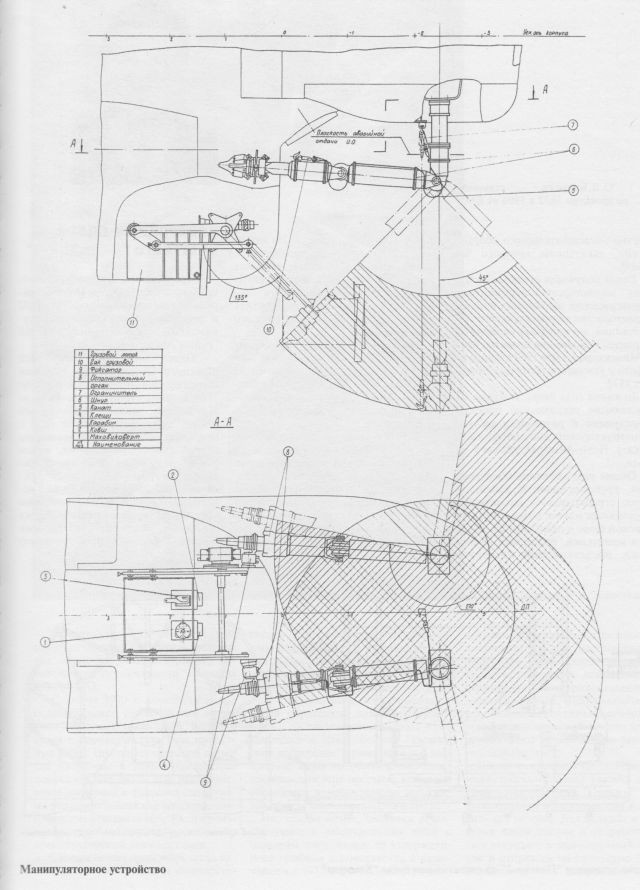
Diagram showing movement of manipulator arms.
There were four Search-2's made. The first was initiated in 1970, launched in 1973, and delivered to the Soviet Navy in 1975.
Source: See here.
See other early Underwater Robots here.