
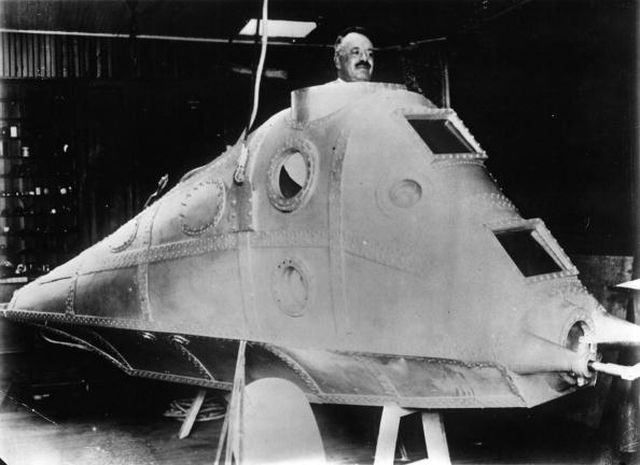
An Armored Sea-Monster
This machine is not really a sea-monster, but the newest thing in diving 'bells', although in this case the operation and construction resembles a miniature submarine. It was invented by Emil Kulik, 52-year-old former sea captain and naval officer, Brooklyn, N.Y. It is plentifully supplied with windows, the driver sitting within and operating the electric motors which drives it at two miles a minute. In front are the two robot arms operated from the inside. Compressed air chambers allow the submersible to be raised or lowered to any depth, remaining stationery at that depth. Kulik intends to try it out. March 1932.
1930 – Diving Apparatus by Emil Kulik
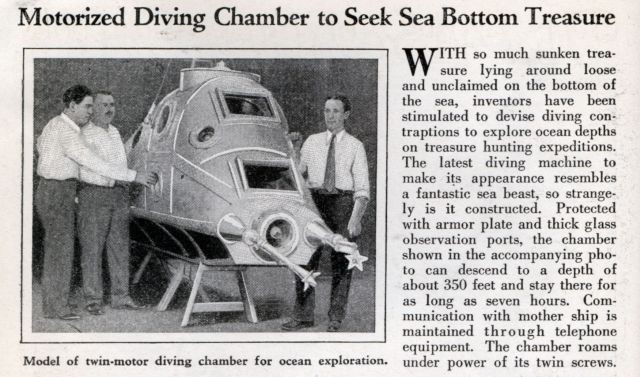
Motorized Diving Chamber to Seek Sea Bottom Treasure – Source: Modern Mechanix, December 1931
WITH so much sunken treasure lying around loose and unclaimed on the bottom of the sea, inventors have been stimulated to devise diving contraptions to explore ocean depths on treasure hunting expeditions. The latest diving machine to make its appearance resembles a fantastic sea beast, so strangely is it constructed. Protected with armor plate and thick glass observation ports, the chamber shown in the accompanying photo can descend to a depth of about 350 feet and stay there for as long as seven hours. Communication with mother ship is maintained through telephone equipment. The chamber roams under power of its twin screws.

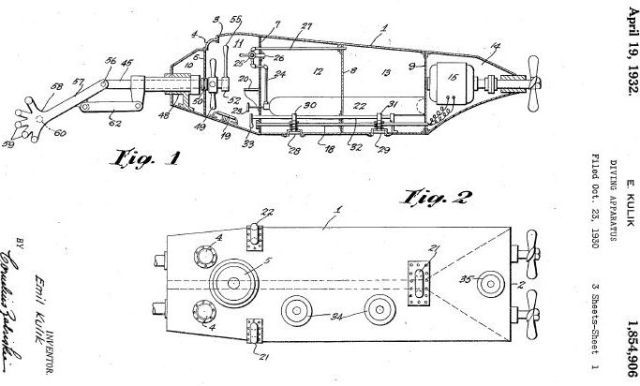
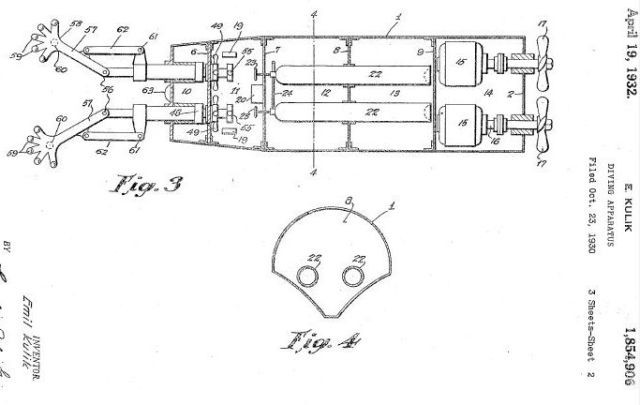
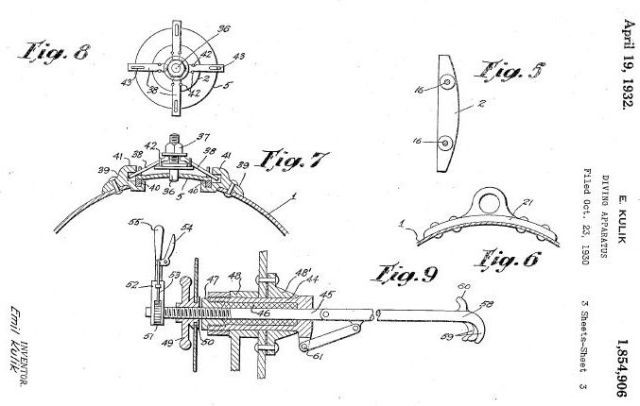
Diving apparatus
Publication number US1854906 A
Publication type Grant
Publication date Apr 19, 1932
Filing date Oct 23, 1930
Priority date Oct 23, 1930
Inventors Emil Kulik
Original Assignee Emil Kulik
This invention relates to diving apparatus and is directed more particularly to improvements in devices analogous to diving bells. The invention is especially directed to an apparatus which maybe lowered overboard from a salvage ship and while attached thereto by cables, chains or the like may be submerged to relatively great depths. The apparatus is such that the interior thereof is provided with a plurality of compartments through the provision of appropriate bulkheads and in these several compartments are positioned devices for controlling the buoyancy of the devices propelling mechanism whereby it may be self propelled and apparatus whereby one or more persons safely housed within the apparatus may direct its operations of undersea salvaging. It is well recognized that divers clothed in even the most modern diving suits cannot descend to any appreciable depth, whereas the device of this invention is so constructed that it can be readily made to withstand pressures at almost any depth.
An important practical feature of the present invention consists in mechanism operable from within the operator's compartment and extending to the exterior of the hull of the apparatus for efficiently carrying on salvaging operations. This means may be graphically referred to as a pair of mechanical hands supported on appropriate arms and so constructed that the operator within his compartment can move the hands and arms in all directions and can manually so coordinate their operations as to accomplish through such mechanical hands everything that can be accomplished by a diver but with even greater power and more efficiency. The said mechanical hand arrangement forms an important part of this invention ….
See other early Underwater Robots here.