TeleOperator/telePresence System / Concept Verification Model (CVM)
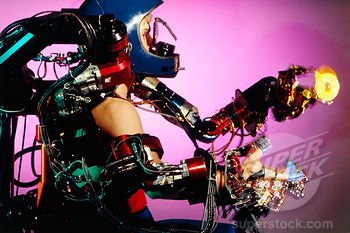
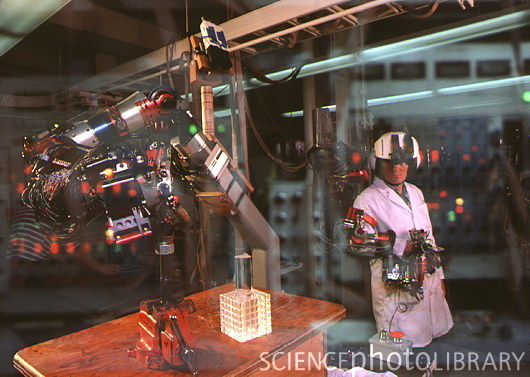
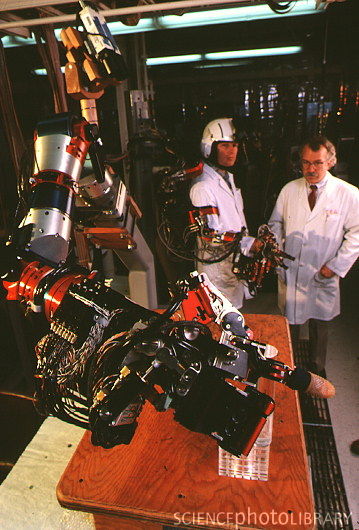
The TeleOperator/telePresence System/Concept Verification Model (TOPS/CVM)[34], was developed as the successor to the 'Greenman'. The TOPS/CVM consisted of a 3-DOF (degrees-of-freedom) head, a 3-DOF torso and a dexterous, force-reflective 9- DOF hand coupled to a force-reflective 7-DOF arm.
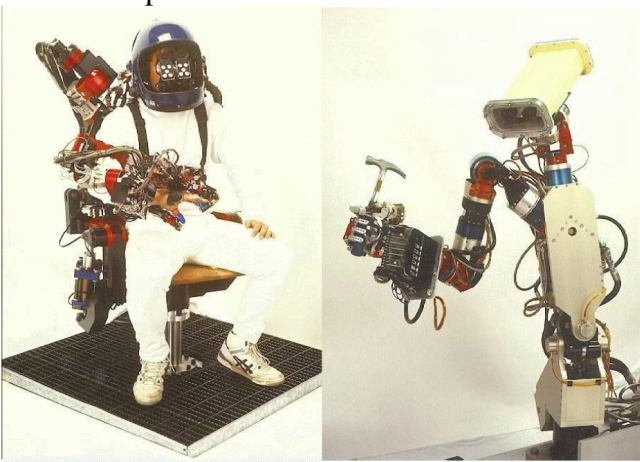
Fig. 1 TOPS from Space and Naval Warfare Systems Center, San Diego
The operation of TOPS was described as follows:
"… The operator controls the hand/arm combination through an exoskeletal controller, while the torso and head motions are controlled by the operator's torso and head motions. …. … The viewing system provides 1023-line monochrome video to the TOPS/CVM operator and has a 70-degree field of view with full stereo overlap. … … The operator interface allows the TOPS/CVM operator to easily control all major TOPS/CVM functions and modes. This is done through the use of voice control and graphic overlay feedback. The second major interface, the supervisor interface, allows technical test personnel intimate access to all TOPS/CVM sensing and actuation systems."
For pdf see here.