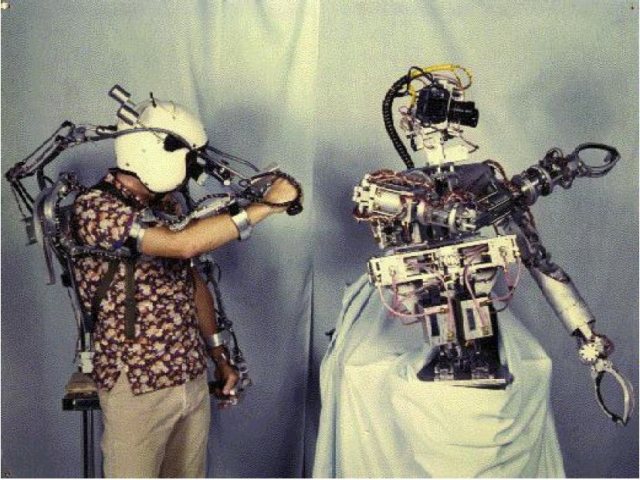
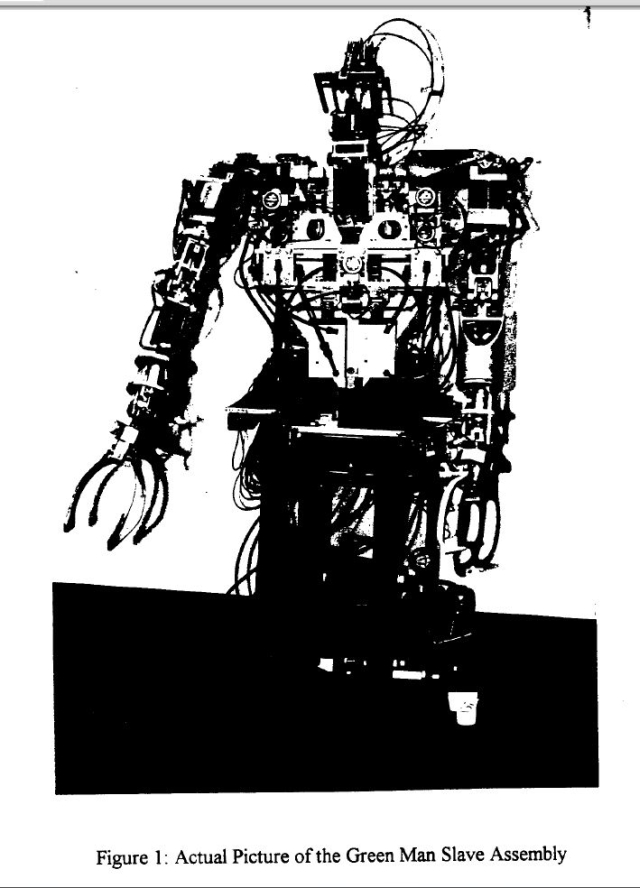
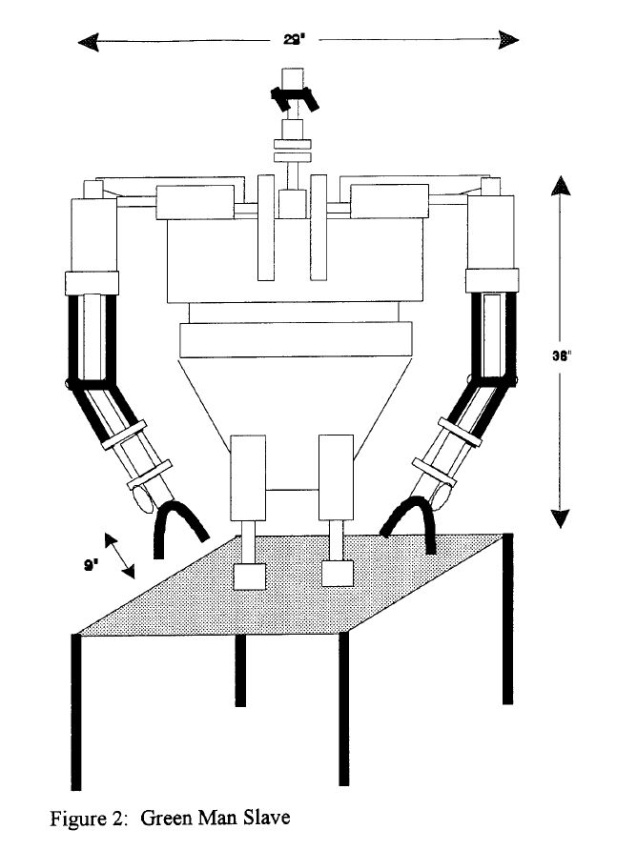
“Greenman” (1983-1988) – The first anthropomorphic (human configured) manipulator developed at SSC San Diego was the Remote Presence Demonstration System, nicknamed “Greenman”. It was assembled in 1983 using MB Associates arms and a SPAWAR Systems Center San Diego-developed torso and head. It had an exoskeletal master controller for the human operator’s torso, arms, and head. Its vision system consisted of two 525-line video cameras each having a 35 degree field of view and video camera eyepiece monitors mounted in an aviator’s helmet.
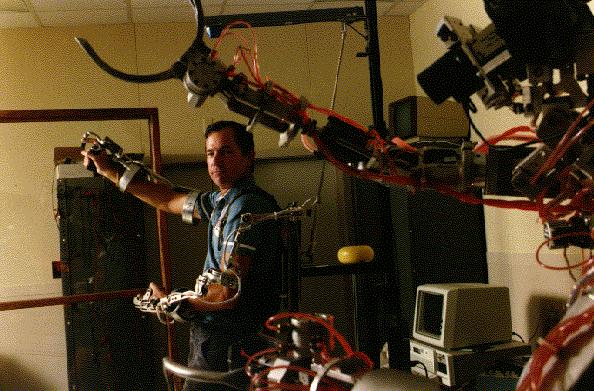
Greenman provided SSC San Diego with valuable experience in teleoperation and telepresence issues and designs. Even with its simple claw hands and no force or tactile feedback, novice operators could readily perform manipulative tasks without training. However, it clearly showed that dextrous hands, force feedback, and a high-resolution vision system were necessary for diver-equivalent work capability. Also the Greenman was not designed for in-water use, and demonstration of in-water work was deemed necessary to fully demonstrate the diver-equivalency concept. These shortcomings were later addressed in the TOPS project.
Video “Greenman – Teleoperated Humanoid – The first anthropomorphic (human configured) manipulator developed at SSC San Diego was the Remote Presence Demonstration System, nicknamed Greenman.”
See pdf here.
Images below from pdf.
See the later 1991 version called TOPS here.