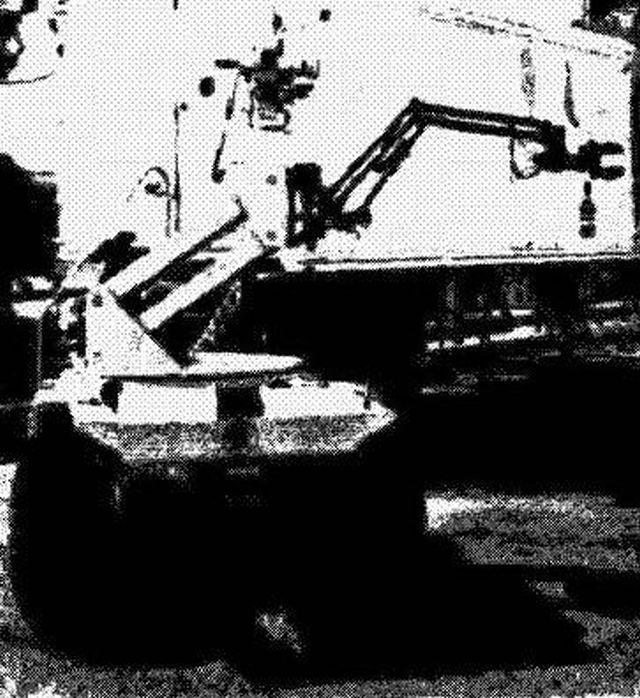
1970-1 – CURV Mobile Linkage Manipulator. Originally developed for the Cable-controlled Undersea Remove Vehicle (CURV), it was adapted for potential use as a mobile nuclear manipulator as seen here. Later it was used in Bezjcy's lab at the Jet Propulstion Laboratories (JPL), along with the JPL/Ames Arm.
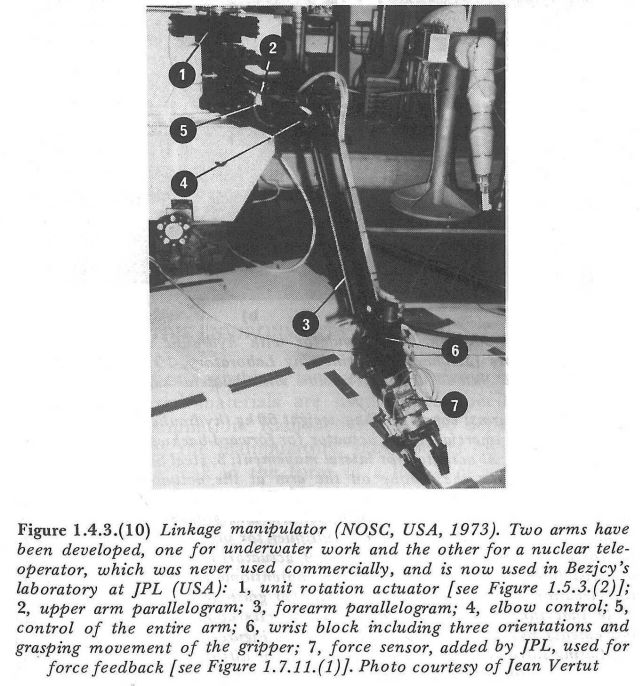
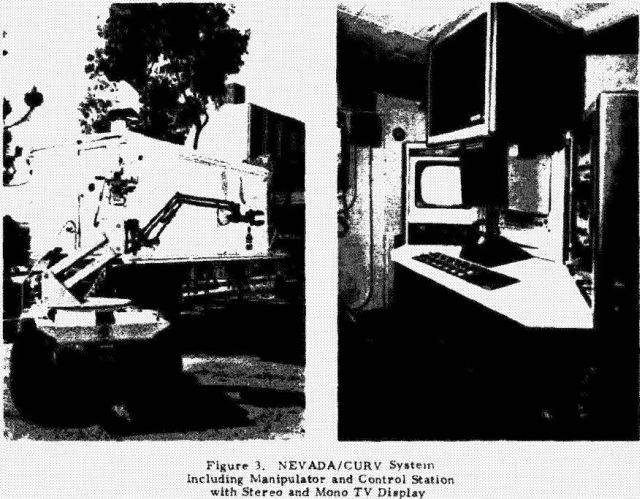
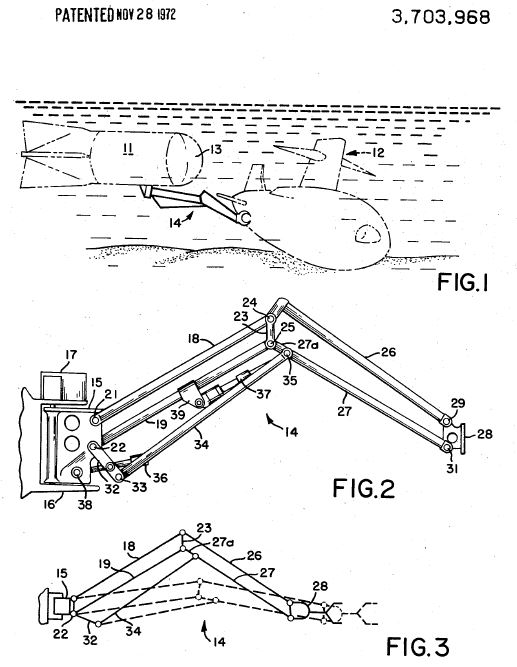
The NEVADA/CURV system (Fig. 3) consists of the CURV Linkage Arm mounted on a turret which can be rotated and elevated relative to the carrier vehicle, two TV cameras for stereo viewing, a separate TV camera for monodisplay, and a remote control station with RF or hardwired link to the vehicle-arm-TV system. This hydraulically powered arm has six degrees-of-freedom, plus opening and closing the hand mechanism. The essential and novel feature of this manipulator is that it provides true linear extension by the use of an idler gear of twice the radius of a forearm drive gear. Extension is achieved by moving the upper arm with respect to the idler. The linkage action causes the course travelled by the wrist during extension to be a straight line passing through both the azimuth and elevation axes. Elevation is achieved by rotating the whole mechanism about the vertical axis of the idler. A double parallelogram added to the linkage eliminates wrist disorientation during changes in elevation and extension or the arm. Thus, the arm performs the function of positioning the hand, without disconnecting it, in a spherical coordinate system. The arm has a high section modulus which makes it rigid but lightweight. The existing prototype can handle loads corresponding to nearly 70% of the arms weight at 1.5 m extension. The control system is presently a single on-off control for each joint. Rate control servo for joystick control and position control servo for computer control are under construction. The equioment of the hand with tactile, proximity, and force/torque sensors is also in progress. Presently, the NEVADA/CURV system is used for hand-eye coordination experiments.
Source: JPL Technical Memorandum 33-721. Jan 1, 1975
See also paper by Uhrich, R., "CURV Linkage Manipulator," Naval Research Center. November 1971.
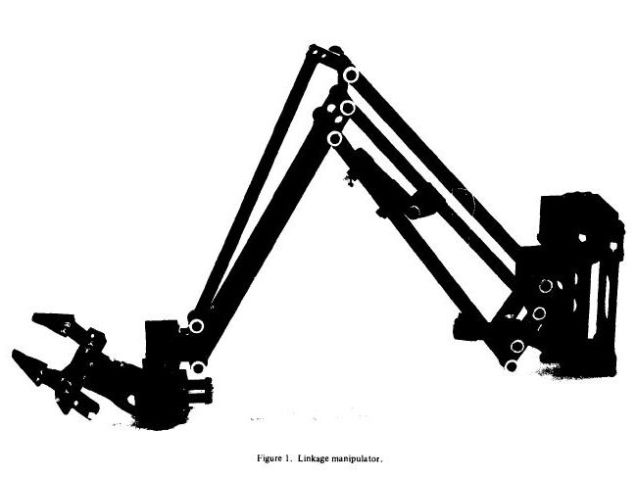
Linear linkage manipulator arm
Publication number US3703968 A
Publication type Grant
Publication date 28 Nov 1972
Filing date 20 Sep 1971
Priority date 20 Sep 1971
Inventors Richard W Uhrich, Jimmy L Held
Original Assignee Us Navy
Abstract
A manipulator arm comprises two parallelogram linkages in combination with a trapezium linkage. The three linkage systems cooperate to produce movement in spherical coordinates when used in conjunction with three independent actuators. The two parallelogram linkages preserve spacial coordination between the wrist, elbow and shoulder joints and the trapezium linkage permits radial extension of objects carried thereby.
See other early Teleoperators here.