GE Orbital Space Tug
MISSILE AND SPACE VEHICLE DEPARTMENT
GENERAL ELECTRIC COMPANY
PHILADELPHIA, PENNSYLVANIA
INTRODUCTION
The General Electric Company has been active in the manipulator and remote-handling equipment fields for several years. primarily in connection with its nuclear laboratories and test facilities. The application of remote-handling equipment to operations in space and lunar situations is a logical extension the work in remote handling. Remote handling will play a definite role in the exploration of space. Investigations of remote-handling equipment for space operations have indicated that considerable research and development work will be required to produce functional remote-handling systems capable of performing the necessary tasks in space.
A great deal of material has been written about the hazardous nature of the space environment, which precludes the necessity of discussing the reason for remote handling in space. Remote-handling equipment should and will be used wherever possible to eliminate the necessity for directly exposing man to space. Normally, the first approach to design for remote handling for earthbound situations is to avoid it whenever possible. The opposite approach, to make maximum use of remote-handling design principles in designing space vehicles and equipment, may well be required.
The remote-handling equipment still require new design approaches of a revolutionary rather than evolutionary nature.
TYPICAL SPACE TASKS
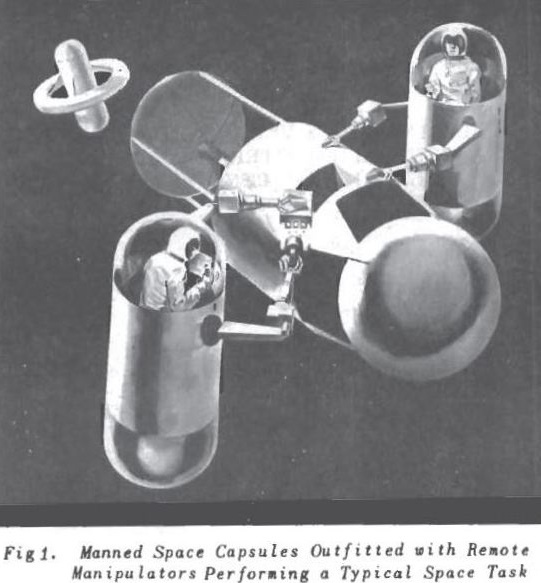
Many tasks in space may have to be performed by remote-handling equipment. In the near earth orbital region, which ranges roughly from 400 to 600 miles above the earth, there are many proposed programs for satellites, manned vehicles, and space stations which will require utilization of manipulators and remote-handling equipment. Such tasks as assembling and disassembling, loading and unloading. inspecting, testing, handling, checkout, and servicing can be performed by remote means. Remote equipment will undoubtedly play an an part in the maintenance of satellites and space stations (see figure 1). Manipulators might be used as a device for grappling, docking, and mating between vehicles or subassembly sections. Several conceptual vehicles for orbital operations, such as the popular space tug have included manipulators as an integral part of their design.LUNAR MISSIONS
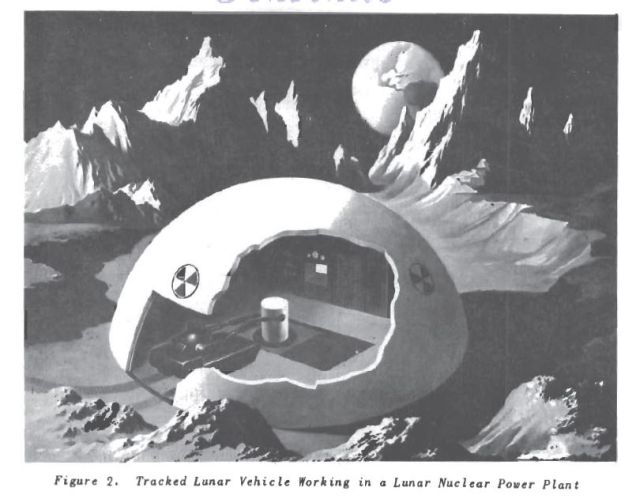
The broad area of lunar missions will include many applications for remote-handling equipment. In addition to the tasks already mentioned, exploration, sampling, and experimentation might be performed remotely. The construction and servicing of lunar base facilities, particularly nuclear power systems, may well be handled by remote equipment. A simple, compact, highty dextrous manipulator may be required as an integral part of a space suit to overcome the problem of the gloved hand and to provide a space-suited man with some semblance of manual dexterity. Wheeled or tracked vehicles capable of lunar surface mobility will use remote-handling equipment to perform a variety of functions (see figure 2). As the conquest of space moves from exploration through economic development to mature economic operation, the projected advances in the state-of-the-art of remote-handling equipment dictate that much equipment will be used to an ever-increasing extent in space.
PROBLEM AREAS
There are, of course, many problem areas associated with the design and development of remote-handling systems for space applications. A rather detailed analysis of the remote-handling tasks for each specific mission will be required. The problems of force feedback and tactile perception are important in terms of the information furnished to the operator of remote-handling equipment and manipulators, as well as the "body image" and "frame of reference" problems. The competent operation of remote-handling equipment is heavily dependent upon visual access. Should this access be remote or direct using optical or television techniques? The areas of output control, control transducers, and control actuation requires considerable study. Present control actuation methods for manipulators do not appear operable in the space environment. Pneumatic or hot gas actuation systems seem to hold promise for application to manipulators. Similarly, the results of concurrent work in the fields of materials, structures, mechanisms, bearings, and seals for space vehicles and equipment will have to be implemented. Special effort may be required in these areas to solve problems peculiar to remote-handling equipment. Early recognition and definition of all these problem areas are instrumental to development work for space remote-handling systems. Basic research will undoubtedly be required in many of these areas.
GENERAL DESIGN
Many general design characteristics of manipulators and associated equipment are already apparent. Early space manipulators are expected to be simple with somewhat limited dexterity and force reflection capability. They will be capable of simple, basic movements and operations. The relative simplicity of these early models will necessarily be due to problems with such items as materials, bearings, seals, and control actuation. Also, the size and weight of equipment associated with manipulators, particularly electrically controlled manipulators, limit the complexity and dexterity of these early systems since there is a limit to early booster payload capability. Early remote manipulators will probably be used to position, locate, and place in operation special, self self-contained automatic mechanisms or programmed machines capable of specific operations as required by the specific mission in order to provide the overall remote-handling ssytem capabilitys A new approach to the design of this equipment is required using previous designs and configurations are guide lines rather than as first approximations. The established philosophy of designing vehicles and equipment to be handled or operated on by remote means so as to augment the remote-handling equipment itself will have to be used to a very great extent. This includes consideration of such things as grasping points, register points, orientation indicators, and pilot pins.
CONCLUSIONS
As advances are made in the many technologies used in remote handling, equipment will become more complex and capable of a greater variety of operations. The role which remote handling plays in space can be a large and vital one. Just how large depends upon how much timely develupment work can be started to make equipment available when the need for it arises. Careful planning and study, along with the early initiation of development programs, will insure the future of remote-handling equipment in space.
Source: "Survey of Remote Handling in Space", D. Frederick Baker, USAF, 1962
See other early Teleoperators here.
See other early Lunar and Space Robots here.