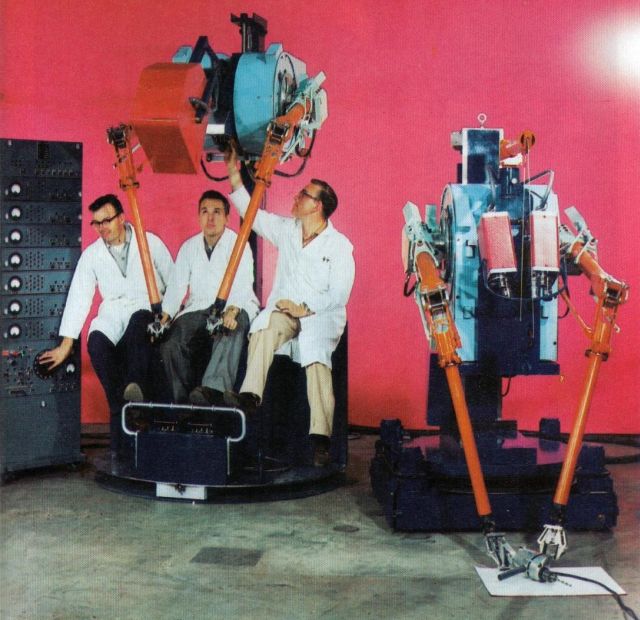
Mobile Remote Servo-manipulator.
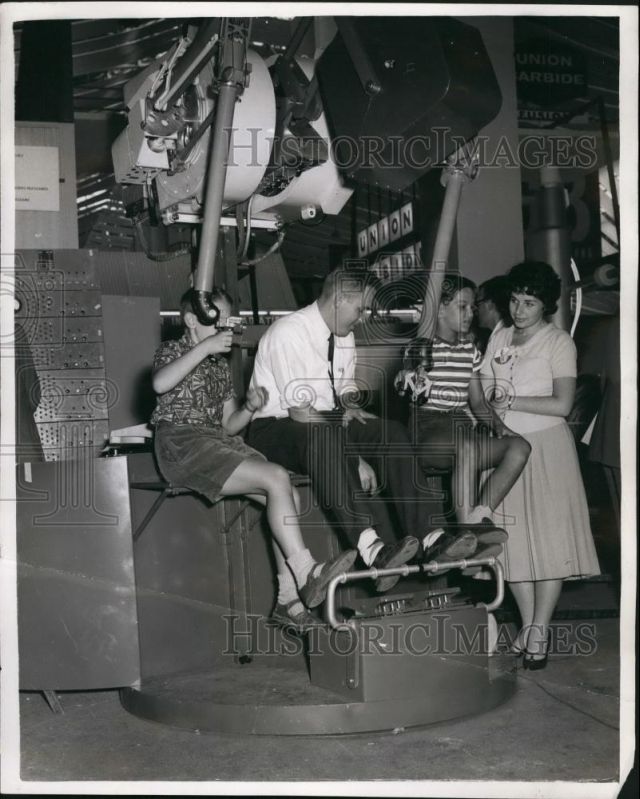
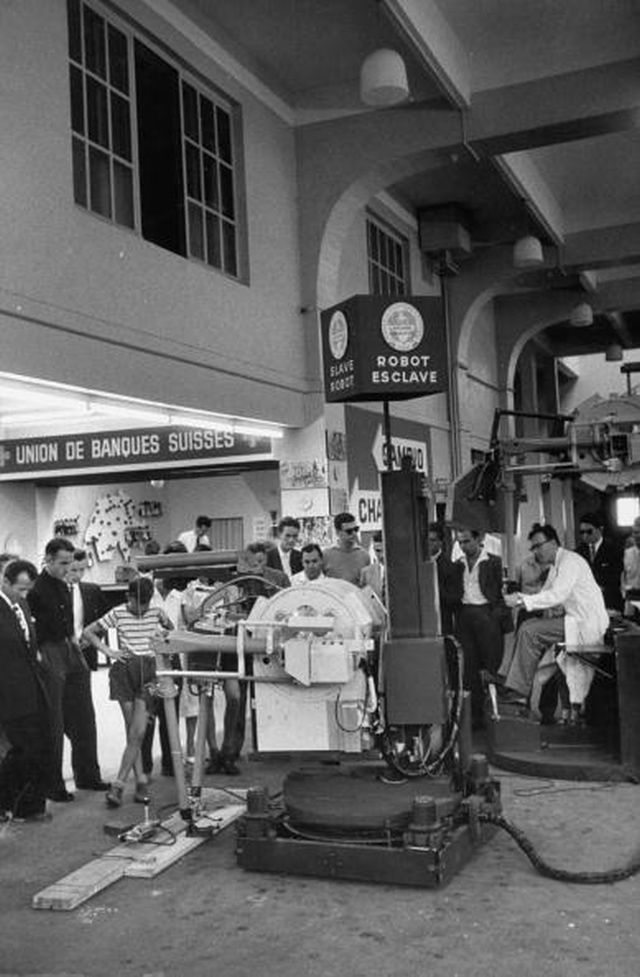
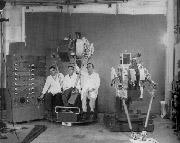
Caption: Robot Demonstrations Of The Atomic Age: Many onlookers – including schoolboys were thrilled by the robot "hands" – dealings with a variety of tasks on one of the stands at the Geneva Atomic Exhibition. The "almost human hands" are used in dealing with radio-active materials behind protective walls and are controlled from a distance with the aid of thick glass windows or with the medium of TV. Photo shows This American made slave robot is designed for the handling of radio-active materials 1/4 and is seen at the Geneva Exhibition. Photo is dated 09-09- 1958.
In use at Argonne National Laboratories, located outside Chicago, Illinois, USA.


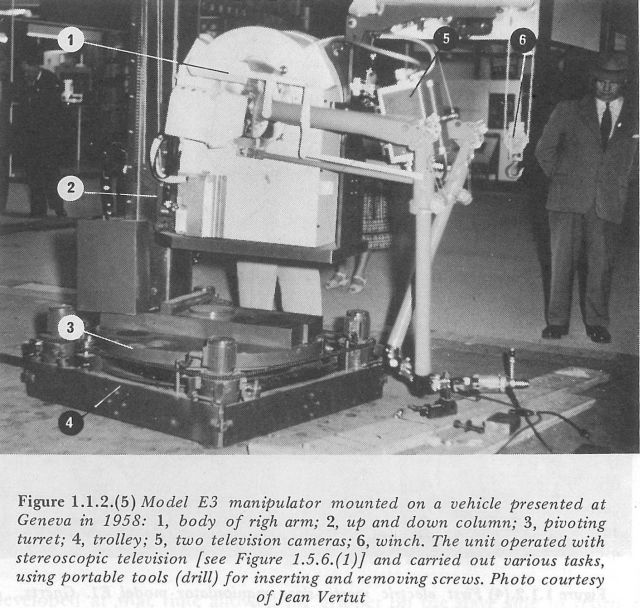
Slave unit.
Slave unit in the foreground; master unit in the background.

Source: Above 3 images from Getty.
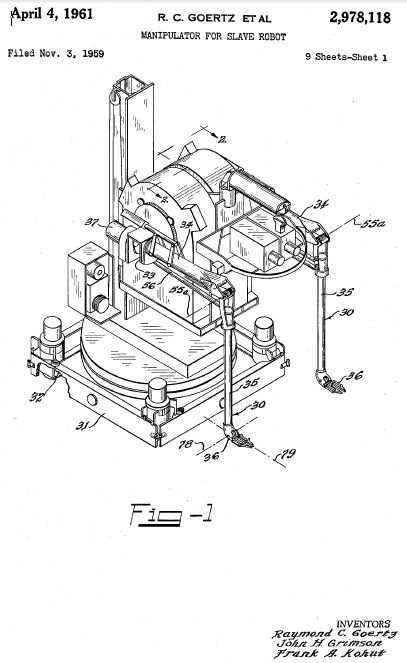
Publication number US2978118 A
Publication date Apr 4, 1961
Filing date Nov 3, 1959
Inventors Raymond C Goertz, John H Grimson, Frank A Kohut
Original Assignee Raymond C Goertz, John H Grimson, Frank A Kohut
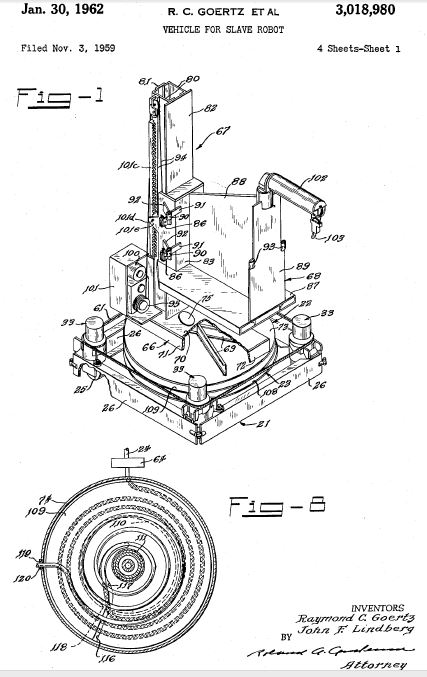
Publication number US3018980 A
Publication date Jan 30, 1962
Filing date Nov 3, 1959
Inventors Downers Grove, Goertz Raymond C, Lindberg John F
Original Assignee Downers Grove, Goertz Raymond C, Lindberg John F
This invention relates to a remote-control manipulator in which slave and master units are electrically interconnected. More specifically, the invention relates to such a manipulator in which two slave units are mounted side by side on a mobile vehicle.
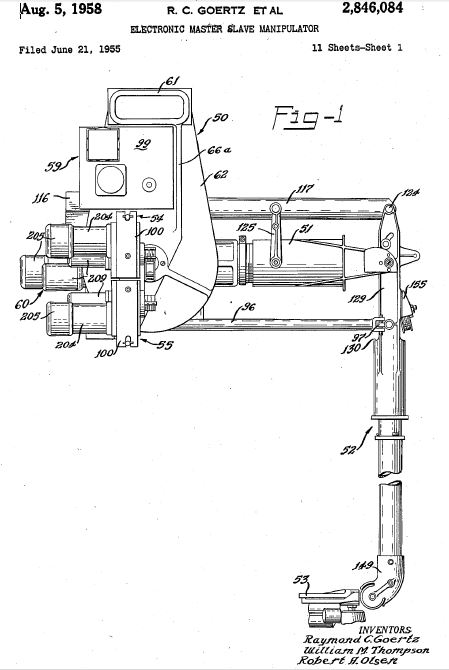
Goertz et al. Patent 2,846,084, dated August 5, 1958, discloses and claims a manipulator having master and slave units electrically connected with one another. 'With such a manipulator the master and slave units can be extensively separated from one another, and the slave unit can be completely sealed in an enclosure.
The present manipulator is an improvement of that of the above Goertz et al. patent in that two slave units as well as two master units are mounted side by side to take advantage of the two hands of the human operator and the two slave units are mounted on a mobile vehicle so as to reach a maximum amount of space.
One desirable feature of the assembly of two slave units and vehicle is that it takes up a relatively small amount of space so that it may be readily maneuverable and have access to the maximum space. Another desirable feature is that the slave units and vehicle should be readily repairable by another manipulator if operation in a sealed enclosure is indicated.
An object of the present invention is to provide a manipulator unit of compact arrangement and size which enable the unit along with a similar unit and a mobile vehicle carrying the units to occupy a small amount of space.
A further object is to provide a manipulator unit that is so constructed and arranged as to be readily repairable.
Publication number US2846084 A
Publication date Aug 5, 1958
Filing date Jun 21, 1955
Inventors Goertz Raymond C, Olsen Robert A, Thompson William M
Original Assignee Goertz Raymond C, Olsen Robert A, Thompson William M
Note: This Remote Manipulator is not MASCOT.
See other early Teleoperators, Exoskeletons and Industrial Robots here.