MASCOT – (MAnipulatore Servo COntrollato Transistorizzato)
ELECTRONIC EXHIBITION IN ROME – 1962

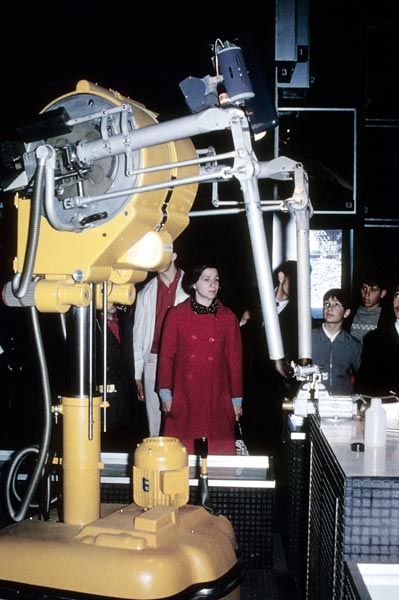
See MASCOT 0:59 secs into above clip at the Palace of Congresses in Rome for the IX Congress of Electronics Exhibition.
Later models of MASCOT were made by Elsag Bailey in the early 1990's. The Mascot first produced by the firm SELENIA in Rome.
The Mk I slave unit only had a single drive motor for mobility.
Note: Initial development of MASCOT started around 1958, not 1960 as mentioned in the article above.
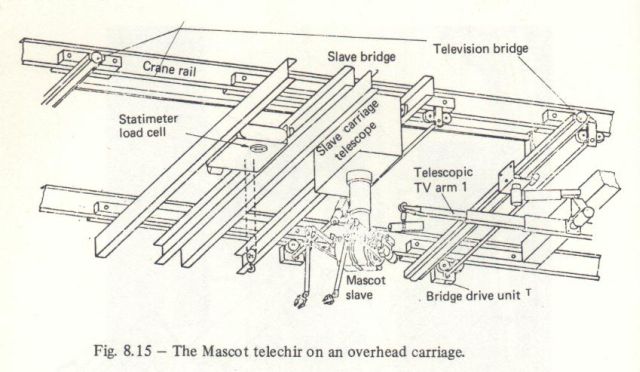
The MASCOT slave could also be mounted on an overhead carriage.
extract from pdf – MASCOT SERVO-MANIPULATOR FOR THE MPS DIVISION – 1969
The first servo manipulator was developed at Argonne National Laboratory under R. Goertz and involved some 8 years of work. Four of them were installed 9 years ago in the remote handling facility of Argonne, since when there has been no further production. In any case, this type was too big for installation in the PS tunnel. The development work was continued by a team at CNEN (Atomic Energy Commission of Italy) under C. Mancini. The first manipulator of this development was presented around 1960, and after many improvements it was exhibited in Geneva at the time of the Atoms for Peace Conference in 1965. Finally, a new type with reduced overall dimensions was finished in 1968 and installed in an Italian fuel reprocessing plant. This version has been seen and tested by us. Its size and working capacity meet very well the requirements inside the PS tunnel.
……
The only servo manipulator which can be obtained at present is therefore the one which was developed at CNEN and will be produced now under the name of Mascot by the firm SELENIA in Rome.
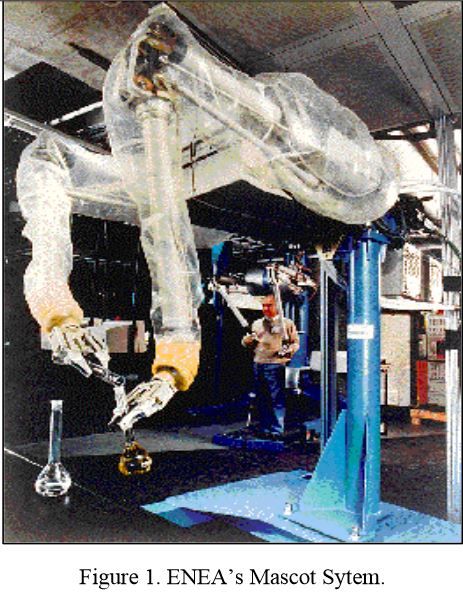
ENEA'S ACTIVITIES IN THE FIELD OF NUCLEAR ROBOTICS – An advanced teleoperator, the Mascot, has been developed by ENEA for use in radiation environments.
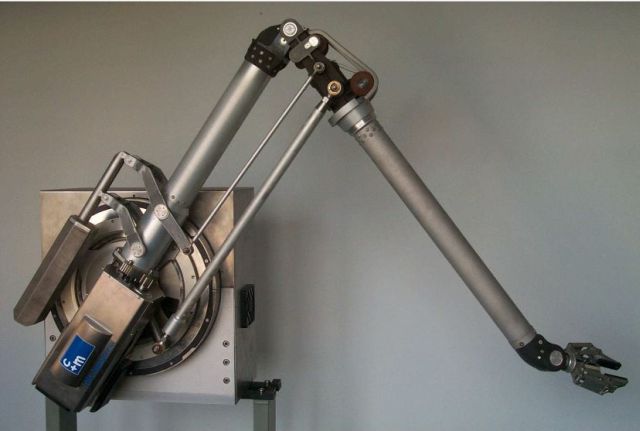
A Mk III version of MASCOT.
The Mascot teleoperation system
In 1961 the researchers from ENEA developed the first Mascot unit, a telemanipulator for nuclear plant operation.
This manipulator was, and still is, one of the best machines available in the world as regards the force feeling it can transmit back to the operator (force feedback signals).
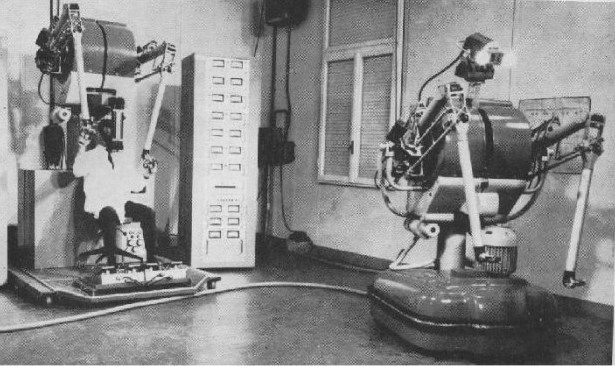
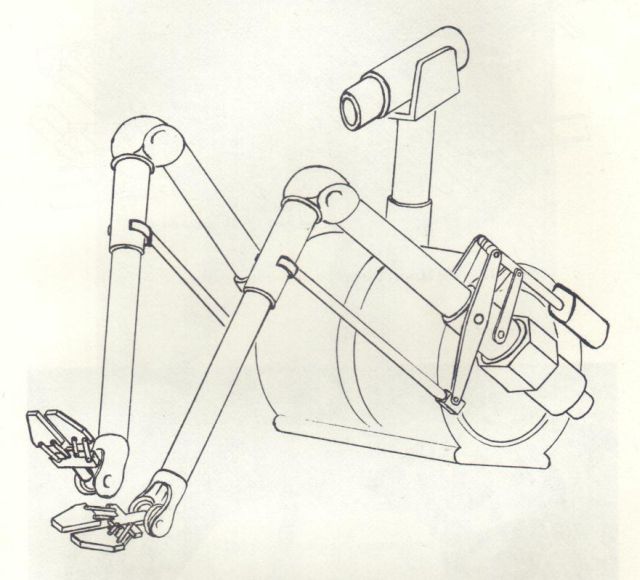
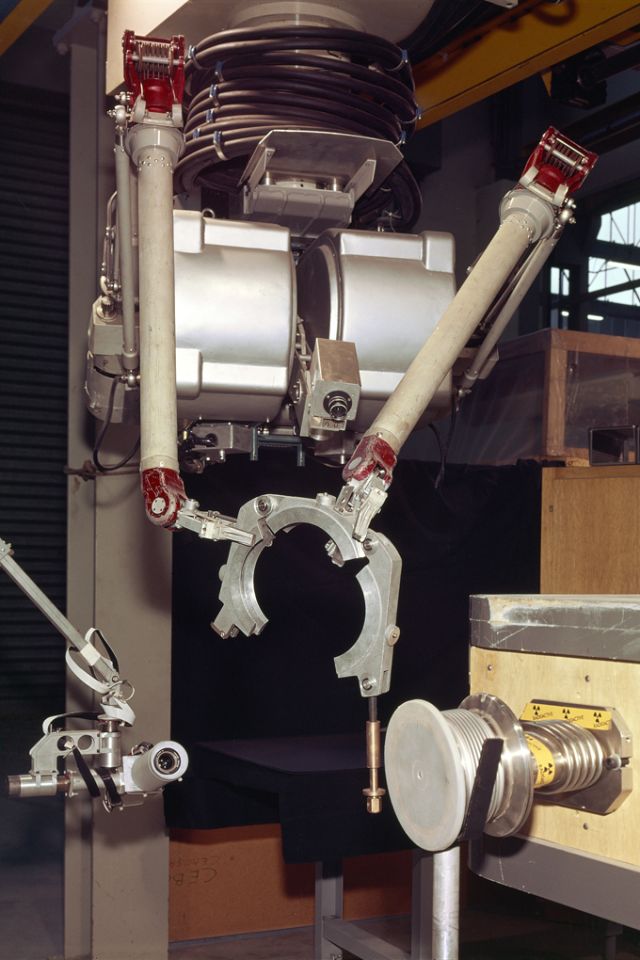
The Mascot is a Master/Slave telemanipulator of the force feedback type (see Fig. 1 above). Each arm has seven servo-controlled joints: six links for six degrees-of-freedom plus a gripper. Each joint is driven by its own actuator through gears or steel cables. The control algorithm is based on comparing the position and velocity of the joints of the Master and Slave arm, sensed at the same instant. These values, the position and velocity errors, are then multiplied by adequate proportional coefficients to determine the torques to be applied to the Slave arm actuators (which is thus forced to follow the Master) and to those of the Master arm, to generate the force feedback to the operator. These torques are applied in order to minimize the position errors.
A modern commercial example of a bilateral teleoperation system for use in the nuclear industry is the MAnipolatore Servo COntrollato Transistorizzato (MASCOT) system developed by Elsag Bailey.
This features dual six-DOF, kinematically identical, master and slave arms with full bilateral control. Each arm can move up to 20 kg with an accuracy of 0.5 mm. Communication between master and slave sites is via optical fibre cable. The system has the ability to compensate for the weight of grasped objects (so that those constant forces need not be maintained by the operator). It supports reindexing (so the workspace of the slave manipulator may be larger than that of the corresponding master arm), and has a "teach and repeat" function (so sequences of operations may be stored and later replayed).
The early MASCOTs were analogue based, and only in the 1990's were they digitalized.

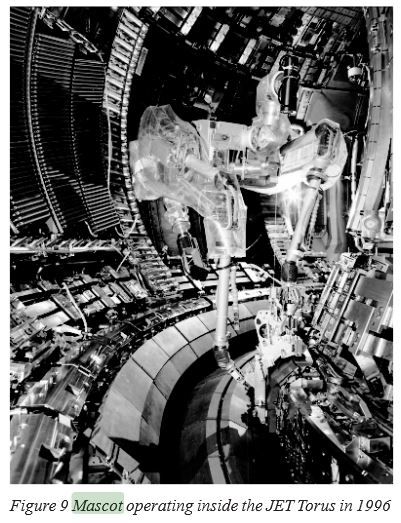
MASCOT Mk IV specification described in its JET tokamak upgrade in 1990.
"The Mascot IV telemanipulator was chosen by the remote handling group in the late nineteen eighties to form the basis of the remote maintenance system for the JET torus. It is a two arm Master-Slave device with 7 degrees of freedom per arm (including gripper).
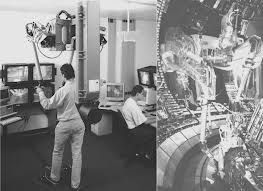
The Mascot IV microprocessor (Z8000) controlled system evolved from the analogue Mascot III developed at ENEA in the 1960’s. The Master and Slave controllers are linked by a high speed 1MB serial line, allowing a separation of several kilometres. The Slave unit can be positioned anywhere inside or outside the tokamak, using specially designed robotic transporters, while the Master unit is operated from the remote handling control room.
The ‘man-in-the-loop’ philosophy of using bilateral, force-reflecting, servo-manipulators was considered necessary to provide the flexibility to handle the wide range of maintenance tasks that the constantly evolving JET project would require. Viewing is provided by the ‘Cyclops’ camera mounted on the Slave unit between the arms, two wrist mounted camera’s, a hand-held
mobile camera unit, and other in-vessel camera’s."
H.A. Ballinger, 'Machines with arms', Science Journal, October 1968
…..
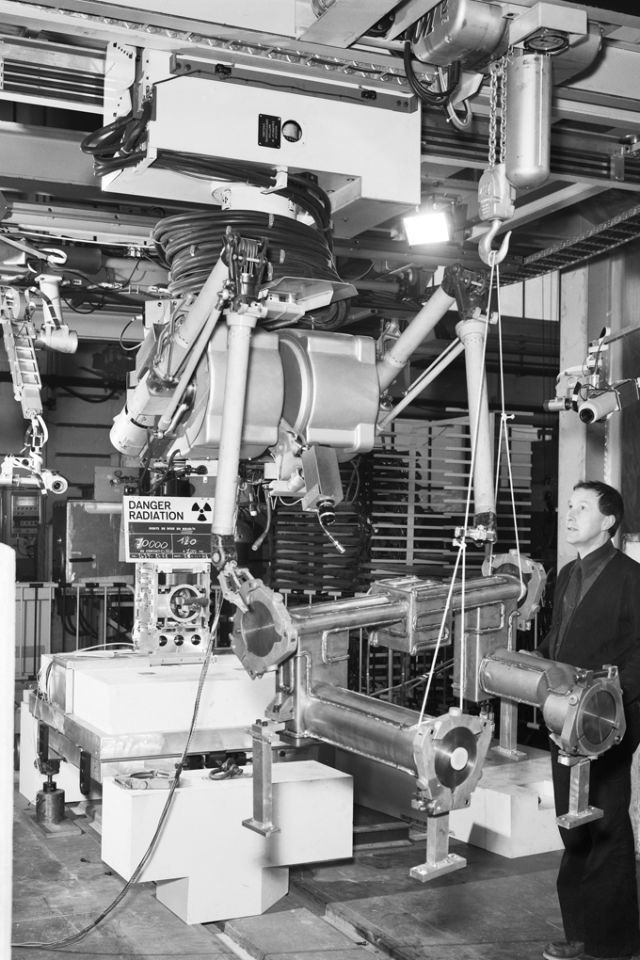
Because European governments have not sponsored extraterrestial developments of nuclear power, there has been little money or encouragement for creating free-roving machines with arms.However, a section of the CNEN Laboratories of Italy under Ing. C. Mancini created in 1960 a note-worthy machine: the MASCOT (Manipulatore Servo Controllato Transistorizzato). This device followed and improved on the techniques of Goertz in mounting a pair of arms, with the described bilateral control, on a mobile 'dolly'. From a console fitted with an identical master arm, a stereo vision screen and a foot control for the dolly's movements, the seated operator can integrate his own subconscious neuro-muscular control into co-ordinated and complex responses of slave's movements. Its one limitation, like that of the others described, is a restriction to floor areas cleared of normal obstructions. But, of all the machines developed, the MASCOT is the most aesthetical engineered device; the machine creates a humanistic impression which generates an impulse to speak orders to the machine rather than to the operator.
The Goertz Teleoperator Model E3 was used by the Italians as a basis for development of the MASCOT servomanipulator.
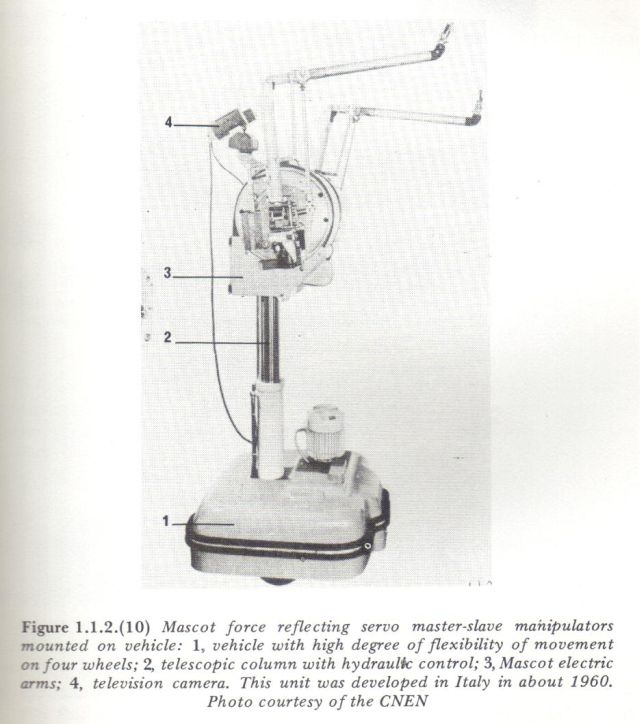
A few pages from Robotics by John F. Young, 1973 giving specifications of MASCOT. See pdf Mascot-Robotics-J-Young-1973
See other early Teleoperators, Exoskeletons and Industrial Robots here.