
The below video clip was recently placed on Youtube by Neil Mizen's son.
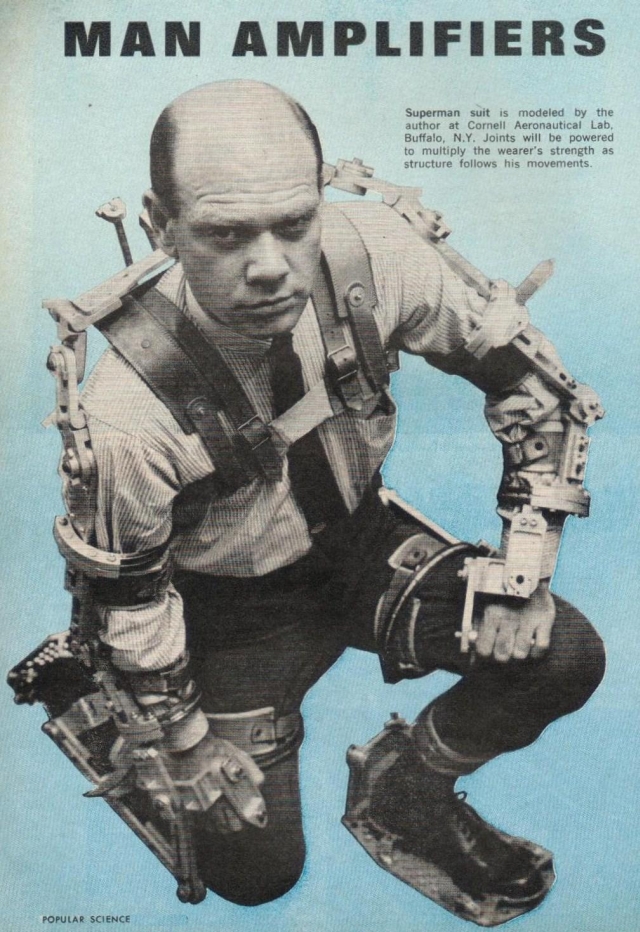
The person in the video and in the below pics is Ronald J. Patterson, a technician from Cornell Aeronautical Labs at the time.
ll
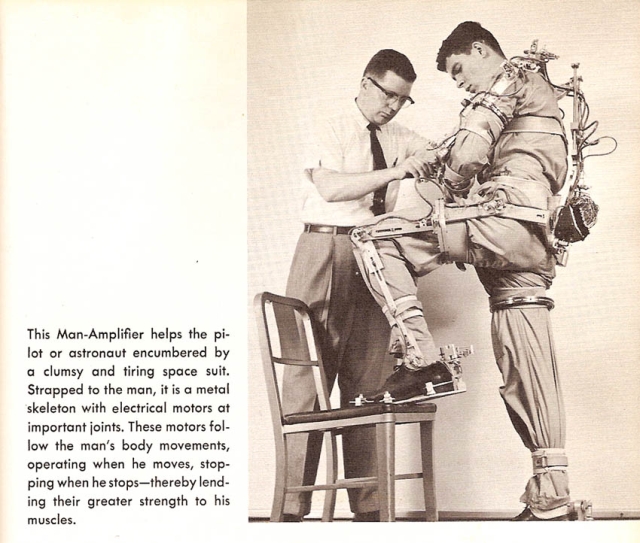
Note: The description above incorrectly describes the exoskeleton as having motors. Unfortunately Cornell never got to the powered stage.


.jpg)
Cornell Aeronautical Laboratories of Buffalo, New York were producing papers on Man Amplifiers as early as 1960. In 1961 they received a grant to explore these ideas. Initial work was on an exoskeleton, and later work on a mock-up.
There are some initial concepts one has to be aware of in understanding Man Amplifiers.
Typically there is a master component, and a slave component. In other teleoperated manipulators, they are physically and spatially separate. In the exoskeleton man-amplifier, they are together. In the Cornell Man-Amplifier, one of the problems encountered was the close proximity of the control harness (master) with the powered exoskeleton.
You will often see the phrase "bilateral force feedback with force reflection".
Bilateral force feedback meaning that both the master and slave units have common joints and position and force information can be transmitted in both directions (from operator to task and vice versa). Force feedback is when, for example, an obstacle is met with some resistance, that the resistance is felt back at the master. E.g. if you were to place an object next to a wall, you, as the operator, would feel the wall if the object being held by the slave unit touched it.
Force reflection is force feedback but the power can also be amplified. A force-reflection ratio of 1:1 would be normal force-feedback (compensation for the units weight and inertia). A ratio of 1:10 would mean that, for example, the person operating the master unit would lift an object of 1 kilogram would amplify to 10 kilograms at the powered slave end. The ratio can also go in the other direction and could apply to manipulators such as those used for surgical procedures.
The first prototype man amplifier wasn't to be seen until General Electric built their Hardiman I, based on results from the Cornell research.
There are a few articles on Cornell's Exoskeleton. The pdf's are :
1. Preliminary Design of a Full-Scale, Wearable Exoskeletal Structure – Neil J. Mizen 1962.
2. Design and Test of a Full-Scale, Wearable Exoskeletal Structure – Neil J. Mizen 1964.
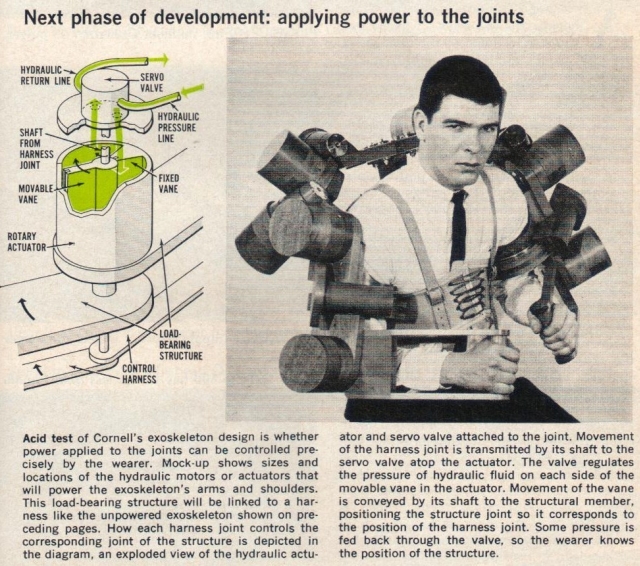
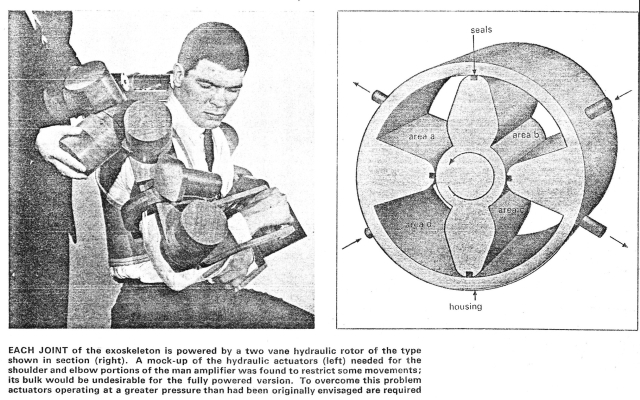
3. Exoskeleton Man Amplifier – Popular Science Nov 1965.
4. Exoskeleton Man Amplifier – Mechanix Illustrated Dec 1961.
5. Machines With Strength – Science Journal Oct 1968.
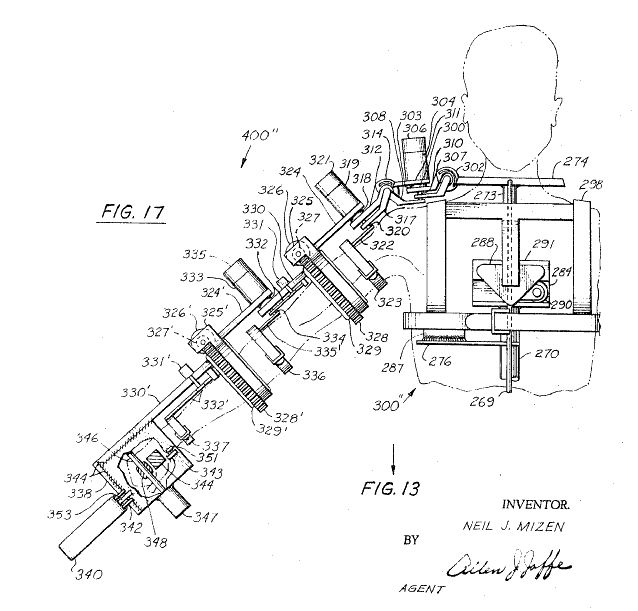
See also Mizen's patent for the Man-Amplifier here
POWERED EXOSKELETAL APPARATUS FOR AMPLIFYING HUMAN STRENGTH IN RESPONSE TO NORMAL BODY MOVEMENTS.
Neil J. Mizen et al
Patent number: 3449769
Filing date: Jun 27, 1966
Issue date: Jun 17, 1969

Some of the concents of the exoskeleton were spun off for possible use in rehabilitation. Above we see the "Myotron", where the powered exoskeleton is exercising the disabled limb.
http://www.youtube.com/user/flaviodavidjimenez