Although built using a child's electric car as the chassis, the fully functional Buster was a true Cybernetic Animal, showing reflexes, phototropism, and hunger / recharging modes. He could operate totally autonomously if so desired, but had manual overrides via a remote panel or remote control via an acoustic adapter.
No CPU chips here. Op-amps, TTL digital logic gates, comparators and 555-type timers.
BUILD YOUR OWN WORKING ROBOT – Heiserman
This one-of-a-kind book offers complete instructions-plans, schematics, logic circuits,
and wiring diagrams-for building Buster, the most lovable (and mischievous) mechanical pet in the world! He'll serve you coffee or bring you the morning papers.
He'll forage for his own "food" and scream when he can't find it. His "curiosity" will get him into one plight after another, but Buster has the capacity to get himself out of trouble just as easily as he got into it! Not a project for novices, Buster is a sophisticated experiment in cybernetics. You build him in phases, and watch his personality develop as you add progressively more advanced circuitry to his mainframe. 238 pps., 117 illus.

Build Your Own Working Robot by David L. Heiserman
1976
THE BUSTER CONCEPT
WHAT IS BUSTER?
Buster is rather hard to describe in a few words. Part of the trouble with trying to describe Buster is that he ( or it) is two different things at the same time: he is both a machine and an evolutionary process. What's more, Buster is unique as a machine and quite unusual as a process.
As a machine, Buster represents the highest-order machine that technology can produce today. The lowest-order machine can be represented by simple hand tools such as hammers. screwdrivers, and pliers. The next order then takes the form of slightly more complicated labor-saving devices such as motors and engine-driven vehicles. Basic computer systems represent yet a higher order of machinery—machines that can save humans both mental and physical energy.
Buster is much more than any of these machines. He is much more than a tool, a man-controlled machine, or a computer system. Buster is a machine that is capable of setting its own goals and achieving them within the limitations of its own logical and physical abilities. And unlike any of the lower classes of machine, Buster can be fully operational without human intervention. Of course Buster can interact with a human operator, provided he doesn't have any other needs that are more urgent at the time. The completed Buster system can, in principle, live a long and active life in the total absence of human company. Lots of simpler machines can run without human intervention, too; but they cannot set their own goals.
One of the essential keys to Buster's unique position in the world of machines is his built-in animal-like reflex system. Every animal has a reflex system of some sort that mainly serves as a mechanism for survival or self-preservation; and most animal behavior is motivated by the needs of survival. Buster has a survival-oriented reflex system ; and whenever his energy cells become "hungry," for example. he takes action appropriate for recharging them.
Buster also has a need for activity. His primary goal in life. aside from keeping himself nourished, is to move about. He wanders around for hours on end. poking into corners and running headlong across the floor. If Buster's human doesn't take all the proper precautions, Buster can accidentally disable himself ; but as long as the accident isn't one that causes serious physical damage, Buster eventually gets himself out of the predicament or else begins crying for help.
Of what use is Buster? The question is not really appropriate. It's like asking what use is a puppy. Aside from the technical challenge of building such a system. Buster's real "use" lies in playing with him and watching him at work. Buster can be trained to do tricks and fetch a newspaper. but so can a puppy ( and for less money). The motivation for building such a system must come from the experimenter's own constitution—there must be a desire to work first-hand with the highest class of machine available today.
Buster is also a process. Unlike most other electronic projects. the system doesn't have to be complete before he comes alive. Buster evolves stepwise through this book. each step in the process adding more detail to his animal-like behavior.
This evolution-oriented program has the distinct advantage of letting you. the experimenter, reap some of the benefits of your time. labor. and cash outlay long before the program is completed. Once the basic mainframe, power supply. and power control systems are built. you can add whatever functions that time. finances, and moods dictate. And all the while, you'll have a machine that is fun and educational.
SUMMARY OF THE BUSTER PROGRAM
The Buster development program can be divided into three basic phases: Buster I, Buster II, and Buster III. Completing each one of these phases marks a major advance in Buster's modes of behavior; and for the sake of convenience, Buster is named according to his stage of development.
Buster I
Buster I is a wheeled machine that can be driven and steered by means of a simple control panel. Buster I can be run forward and in reverse at three different speeds. and turned left or right at two different steering angles. The control panel is connected to the machine via an umbilical cord. Although the machine is still run by a human operator, he can cause quite a stir among people who have never seen anything resembling a real robot. Besides. Buster I is fun to play with.
Buster II
The first half of the Buster II phase of the program are concerned with developing Buster's autonomic reflex system and "brain" power. Buster has the capacity for making logical decisions of his own, but he has no way to implement his notions and needs in a physical way.
The first, and most important, reflex system is completed. Here, Buster II is given a set of touch sensors and a control system that lets him make an appropriate motion reflex whenever he blunders into a solid object. This blunder reflex mode takes priority over any other on-going activity, including direct commands from the human operator. Buster II is also given the ability to run ahead at full speed whenever he is not executing a blunder sequence. Buster, in other words, becomes an independent creature at this point in the program. Included is circuitry for sensing low battery levels and signaling the human operator whenever a low-battery condition arises. This is only the first portion of a complete hunger mode that will be completed as part of the Buster III phase. The hunger alarm board also doubles as a special blunder alarm that sounds whenever Buster becomes trapped between two immovable objects.
The umbilical cord is finally cut. You'll spend considerable time and effort working on an up-to-date acoustical data communications system that lets you communicate with Buster via remote control.
Buster III
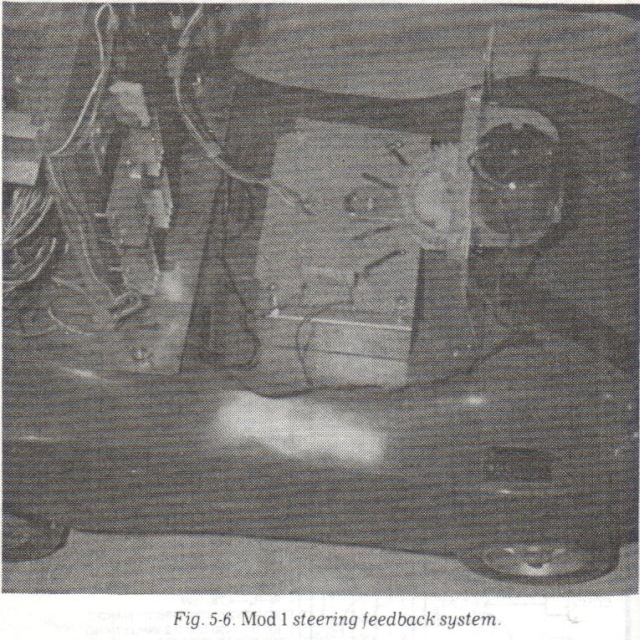
The Buster III phase of the program opens with a discussion of a generalized tracking function. Whereas Buster II is characterized by some reflex responses and independent activity, the main point of the Buster III phase is to give him an active goal-seeking capability. The tracking interface system can be used wherever Buster is supposed to follow or track down a target object.
The hunger alarm system in Buster II merely sensed a low-battery condition and caused Buster to whistle for his master. With the tracking interface now available, Buster no longer has to call for help whenever his batteries begin running low—he simply seeks out his battery charger and plugs himself in.
Buster III is a truly independent creature. He can wander about for hours on end, blundering away from solid objects and running at full speed across the floor and when the batteries run critically low, he immediately tracks down the battery charger. Once the batteries are recharged, he backs out of his "nest" and resumes his feverish activity. You can take over control via the remote or direct terminals, but Buster III always retains his reflex capability that overrides just about anything his master tells him to do.
Anything added to the Buster II system from this point on is simply icing on the cake, e.g. a line-tracing function that lets Buster follow any sort of light-colored line on the floor and suggests some other tracking functions that can direct Buster to respond when he is called.
The final chapter introduces a proposed Buster IV system: one where a microprocessor brain is added to his basic reflex and goal-seeking modes of behavior. The Buster II system is upward-compatible with just about any sort of modern data system; given the appropriate kinds of sensors, Buster can become as much a mechanical animal as your talent, imagination, and resources allow.
[Note: RH 2010 – The final chapter on a proposed Buster IV with a microprocessor brain did not eventuate. The closest we get to is in the acoustic data link so “the whole Buster system can be placed under the control of a more sophisticated minicomputer or microprocessor system that is too bulky to be included in the mainframe assembly.”]
Heiserman also wrote some software for the personal robot RB5X.
See a transcript of a 2008 interview with David Heiserman here.
See other early Mobile Robots here.