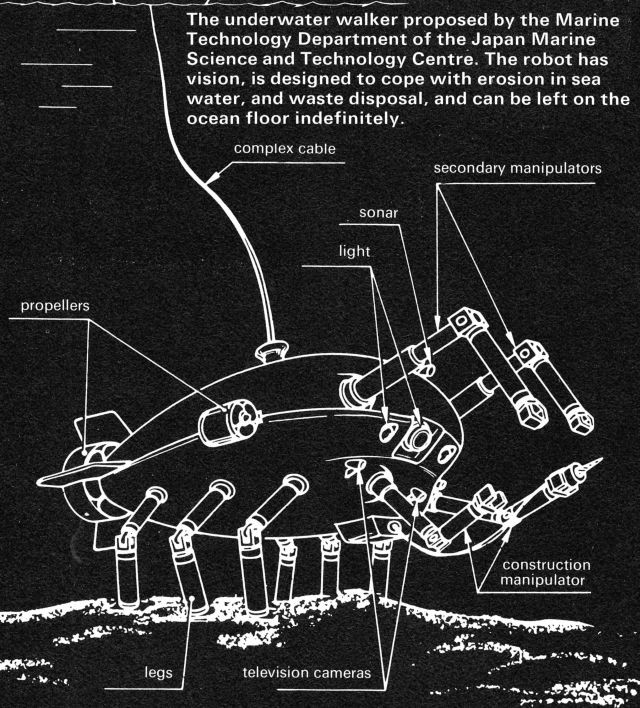
An early Artist's conception from the late 1970's. Source: Robots: Fact, Fiction, and Prediction by Jasia Reichardt, 1978.
Source: Field Test of Aquatic Walking Robot for Underwater Inspection
Junichi Akizono, Senior Research Engineer Mineo Iwasaki, Chief of Robotics Laboratory Takashi Nemoto, Member of Robotics Laboratory Osamu Asakura, Member of Robotics Laboratory – Machinery Division
Port and Harbour Research Institute, Ministry of Transport 1-1, Nagase 3-chome, Yokosuka, Japan 239
Summary
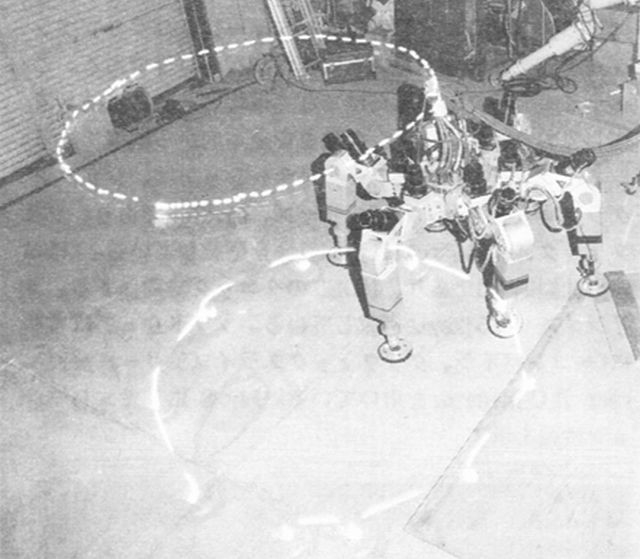
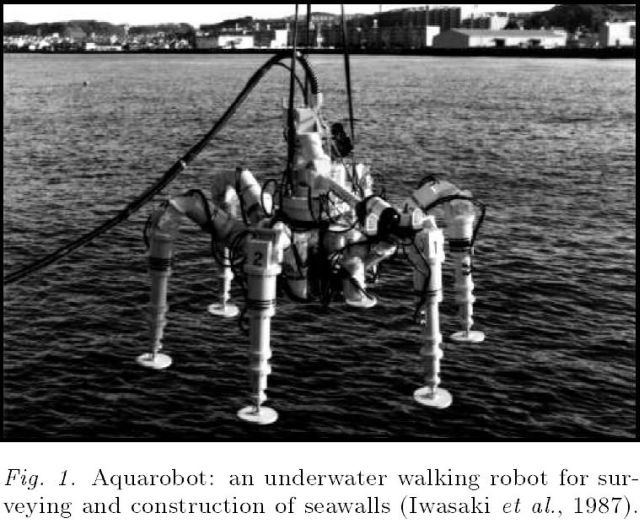
Aquatic walking robot named "AQUAROBOT" has been developed. Main purpose of the robot is to carry out underwater inspecting works accompanied with port construction instead of divers.
This robot has two main functions. One is the measurement of the flatness of rock foundation mound for breakwaters by the motion of the legs while walking. The other is the observation of underwater structure by TV camera.
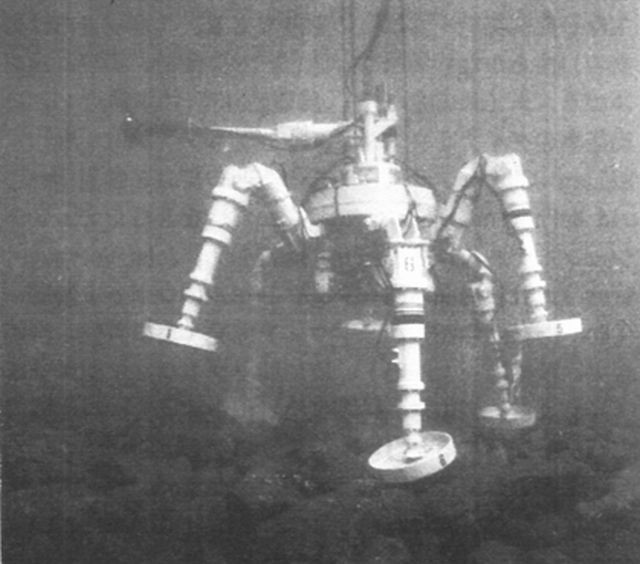
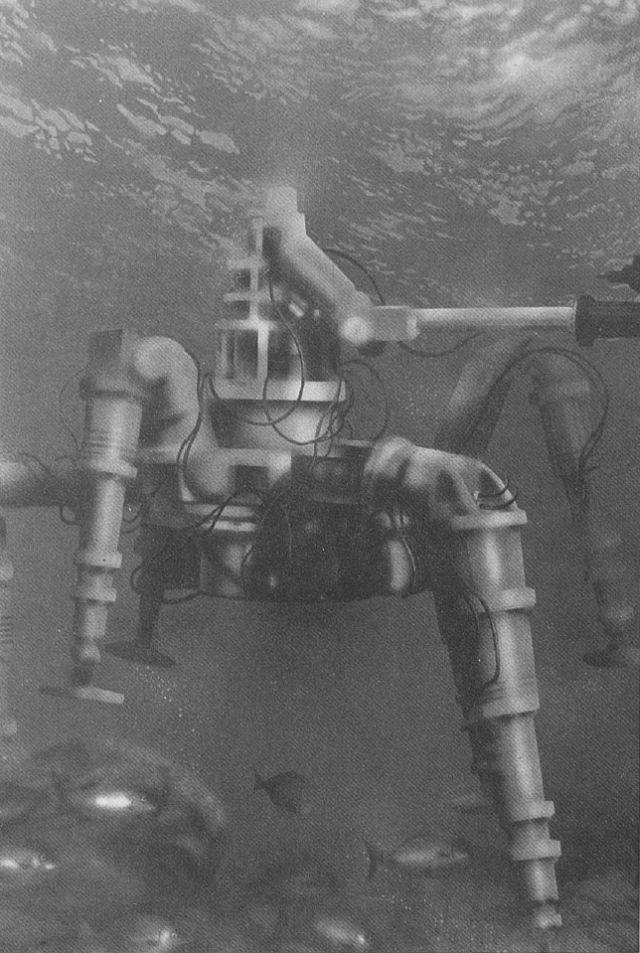
AQUAROBOT is six-legged articulated "insect type" walking machine. Operation is fully automatic because this robot is so-called intelligent mobile robot. The working depth is up to 50m.
AQUAROBOT has an ultrasonic transponder system which is long base line type as a navigation device. It also has an underwater TV camera with ultrasonic ranging device at the end of the manipulator on the body.
Through the field tests, the performance of the robot was proved to be sufficient for the practical use.
Test results are as follows.
Walking speed is 6.5m/min. on the flat floor in the test pool and 1.4m/min. on the irregular rubble mound in the sea. In the case of navigation, the positioning accuracy is within ±21cm. The robot can measure the flatness of rubble mound by the motion of the legs with the same accuracy as divers.
key words: walking robot, underwater application, inspection work.
1. Introduction
The underwater inspection works accompanying port construction are carried out by manual labor of divers. However, the efficiency and safety of underwater activity are not sufficient because underwater condition is austere. Increasing risks and lower working efficiency of port construction work at deeper sea area and shortage of divers make the situation worse. Therefore, it is necessary to develop the underwater inspection robot.
The robot which carries out the underwater inspection work taking the place of divers should have good stability, positioning ability and the ability to move on uneven seabed. Compared with free-swimming type, the bottom-reliant type is good for this purpose. We selected walking type, not wheel type or crawler type or Archimedean screw type, as the underwater Inspection robot.
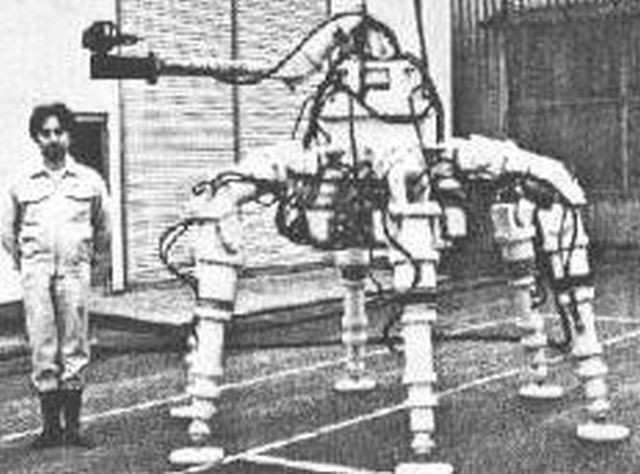
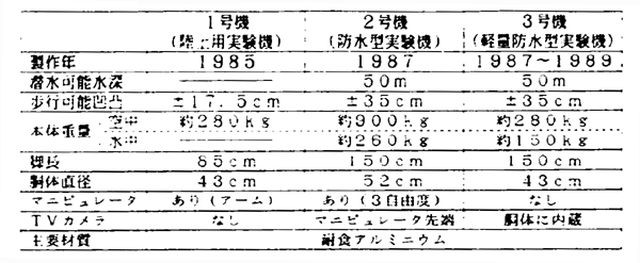
We started this project from 1984 and have made 3 models up to now. The 1st one made in 1985 is an experimental model for overground test. The 2nd one made in 1987 is a prototype. The 3rd one made in 1989 is light-weight type.
In this paper, the walking test of prototype in the sea is mentioned.
2.Outline of AQUAROBOT
2.1 Hardware
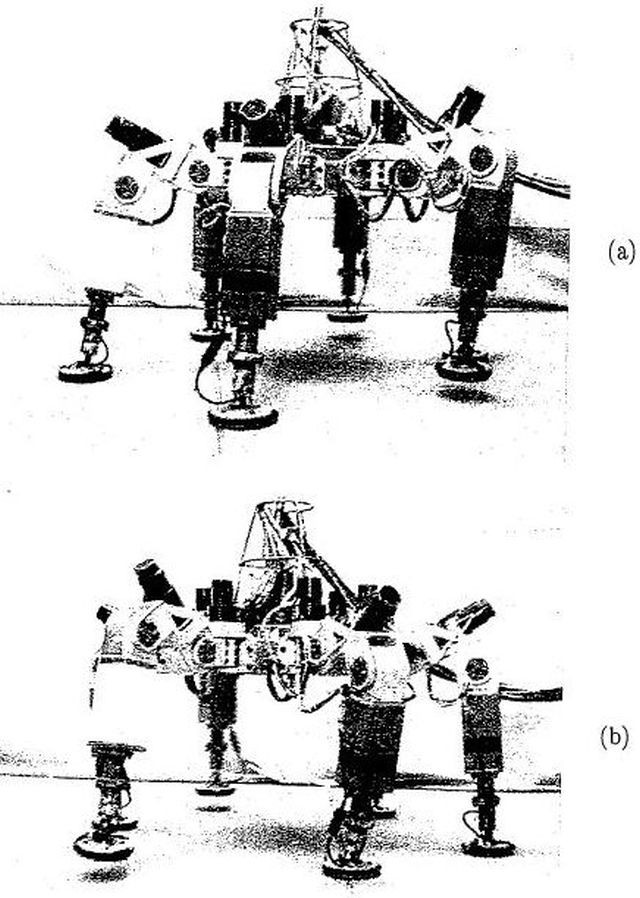
AQUAROBOT is six-legged articulated "insect type" walking machine. Each leg has three articulations, and they are driven semi-directly by DC motors which are built inside the leg. The articulations are mechanically independent to each other.
All the motions are controlled by a tiny lap-top micro computer (CPU 80286), which makes the robot be able to walk on irregular rough terrain. The measurement of the profiles of seabed is possible by recording the motion of the end of the legs while it walks.
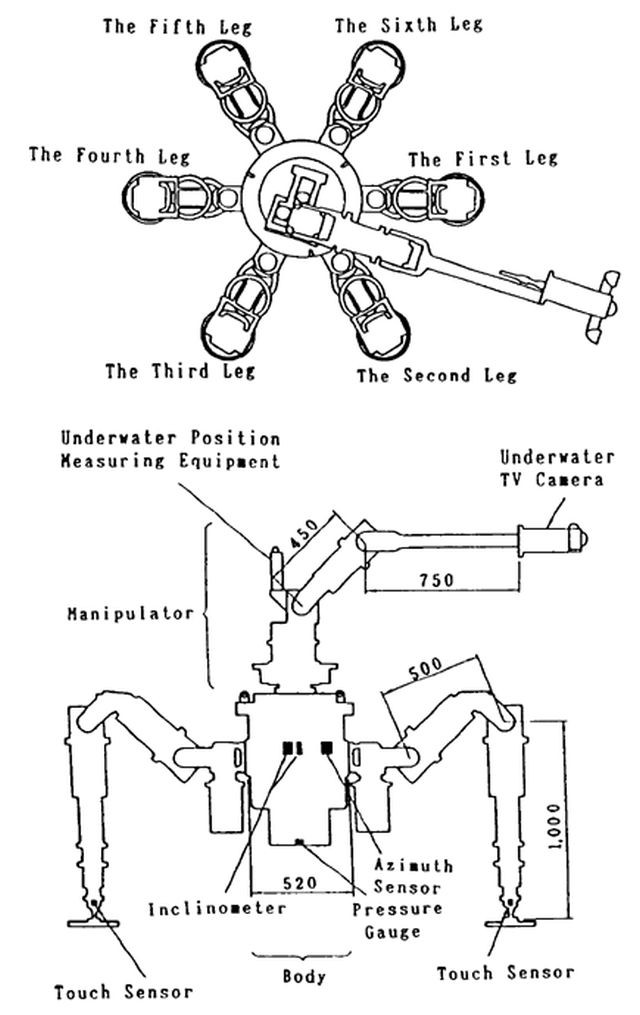
AQUAROBOT can walk in any direction without changing its quarter and can turn within its own space. Each leg is equipped with a tactile sensor on its end and there are two inclinometers, a gyrocompass, and a pressure sensor in the body.
The prototype model has 150cm legs and weighs 857kg. It can be operated 5Om deep in the sea. A manipulator for underwater TV camera with ultrasonic ranging device is mounted on the body. The robot is connected by optical/electric cable of 100m long to the control unit on mother ship.
Prototype has an ultrasonic transponder system which is long
base line type as a navigation device. It also has an underwater TV camera with ultrasonic ranging device at the end of the manipulator on the body.
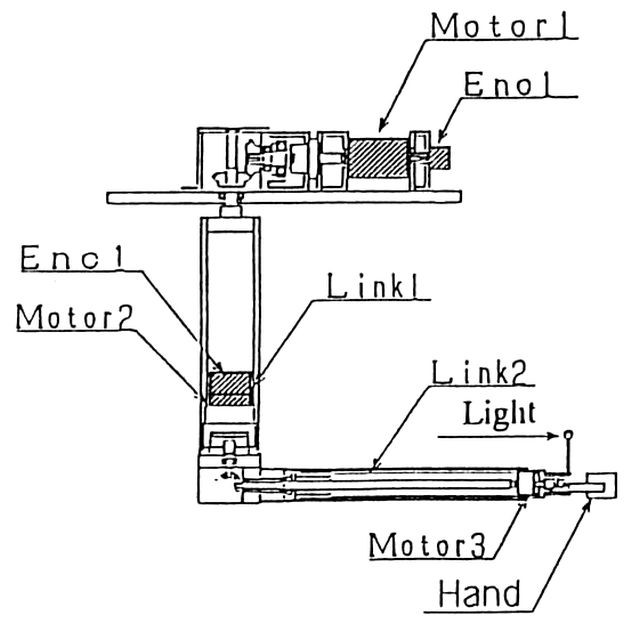
Main dimensions and the positions of the sensors are shown in Fig.2 and the specifications in Table 1.
5.1 Description of the Robot System
The Port and Harbour Research Institute has constructed three models of six legged underwater walking robots. This series of experiments has been conducted on the first model. The AQUAROBOT hardware system consists of a main body and six radially symmetrically located legs. Each leg, made of anti-corrosive aluminum, has three degrees of freedom. The axis of the first joint is vertical and those of the second and third joints are horizontal. A disk-shaped foot is connected through the bottom limb of a leg through a passive spherical joint. One tactile sensor is attached to each foot. Each side of the hexagonal body is 30 centimeters long. The limbs of a leg are 14, 25, and 60 centimeters in length respectively. The motors for the second and third joints are mounted inside the limbs and, through harmonic gears and bevel gears, directly drive the limbs. This design allows their weights to be distributed over legs and makes water-tight structures easy. The powers of the first, second, and third motors are 80,120, and 120 watts respectively. The total weight of AQUAROBOT in the air is 280 kilograms.
The control computer is an NEC PC-9821Xt/C1OW based on a Pentium/90MHz CPU. The software system was written in C++. The sampling time is 50 milliseconds.
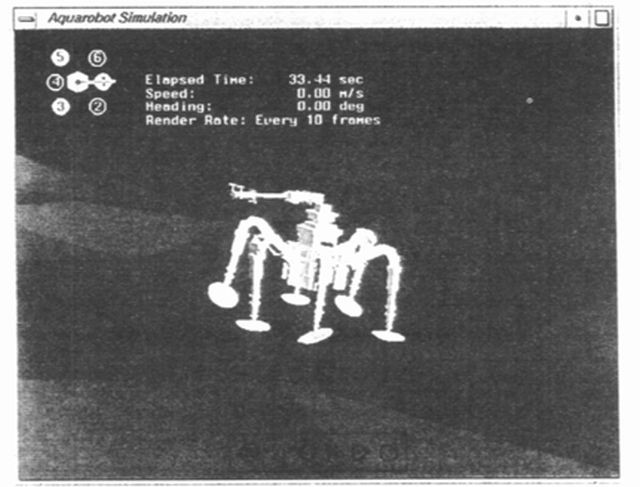
Computer simulation.
The project started in 1984 and made 3 models.
See other early Underwater Robots here.