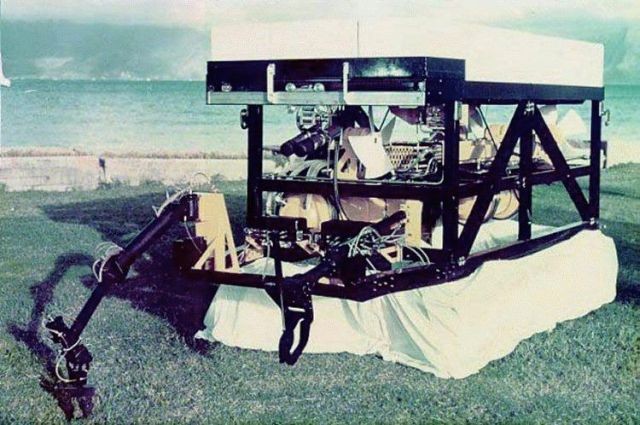
1975 – RUWS Remote Unmanned Work System
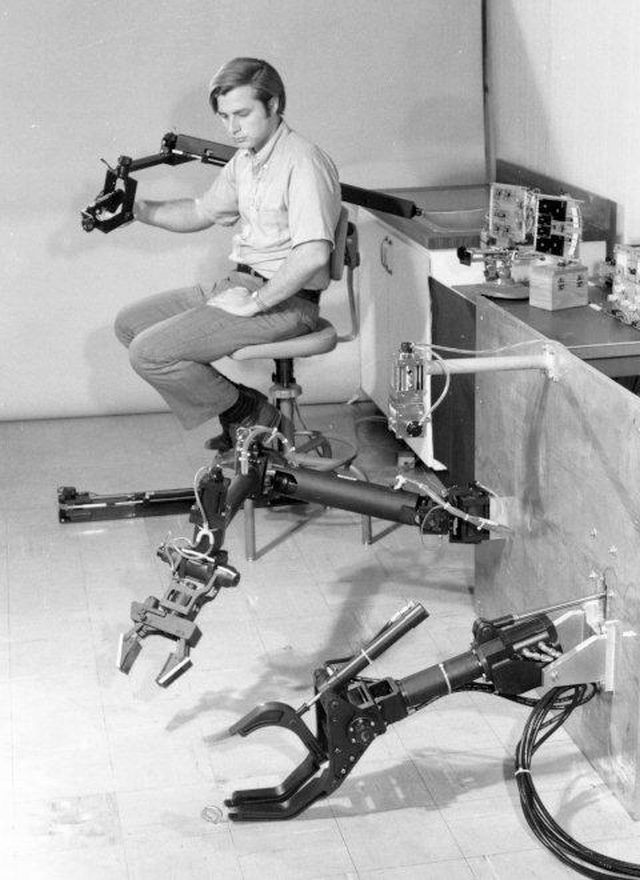
In order to do useful work in the deep ocean, NUC has been active in advancing manipulator technology. A recently developed system is the Remote Unmanned Work System (RUWS) manipulator. It is a master slave system based on end-point or terminus control, rather than an exoskeletal control.
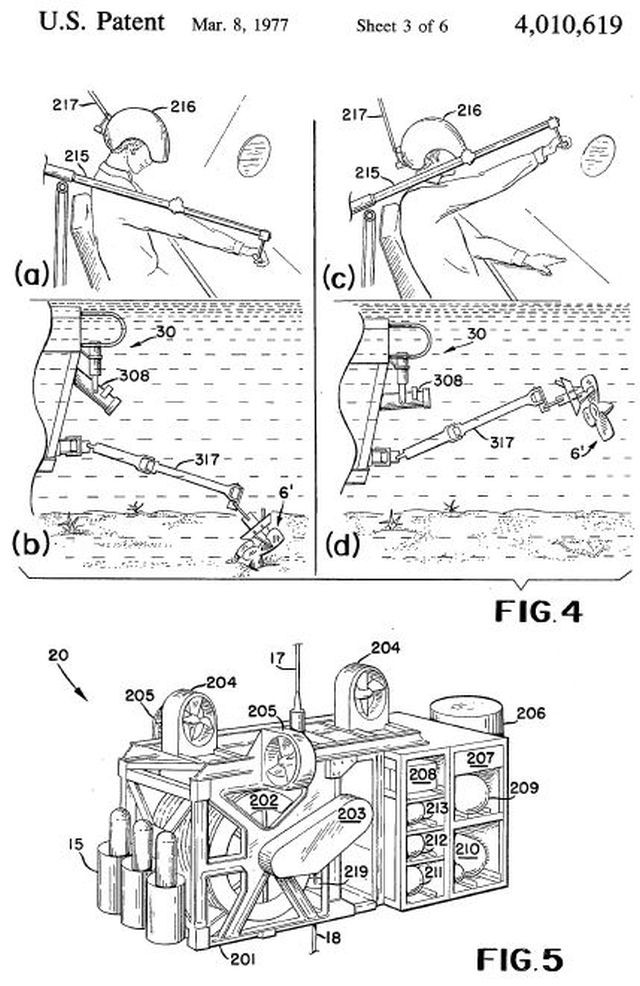
The operator only concerns himself with the notions of the hand. Wherever he moves his own hand, the hand of the manipulator follows. He is otherwise unconstrained. This also means that the designer is not constrained to design the manipulator to resemble or function like a human arm. The grip force which is applied by the manipulator hand is proportional to the distance the trigger is pulled. The three position functions are bilateral, no that the operator has a sense of force feedback. The hydraulic porting of the three wrist functions and the hand are completely internal, so there is no danger of entanglement of hydraulic lines. The tubes which are external to the wrist contain the wiring to the potentiometers which sense the position of the wrist functions.
The subsystems described above appear to have many other applications. First of all the linkage manipulator. because of the simplicity and ease of control. could be en easy "tack-on" to any tainting undersea vehicle, either manned or unmanned, to add to the submersible's work capability. In an entirely different application, the manipulator could be an aid to the handicapped in performing general work tasks. There are many situations wherein a small electric version of that manipulator, attached to a wheelchair, could be very useful in doing simple things which are just outside a handicapped person's physical capabilities. It is also hoped that this type of manipulator might prove useful in remote planetary exploration where more sophisticated manipulators are not practical. Source: Automation Technology Applied to Public Service: Proceedings Edited by Edwin G. Johnsen – 1976.
Some images and text sourced from here.

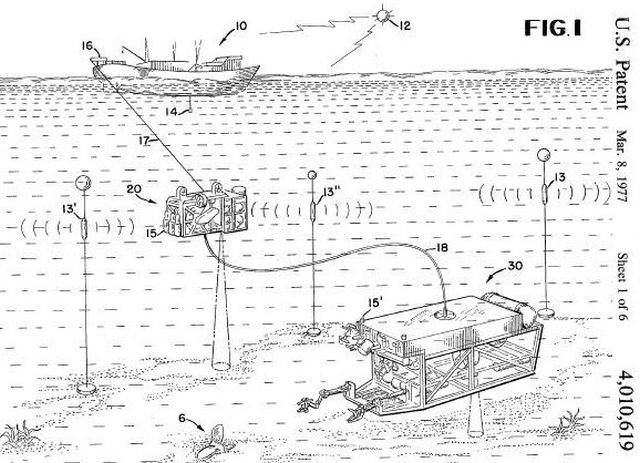
RUWS The Remote Unmanned Work System (RUWS), precursor to the Advanced Tethered Vehicle, was designed to perform a variety of work tasks at ocean depths as great as 20,000 feet (6100 m), giving it access to 98% of the ocean floor.
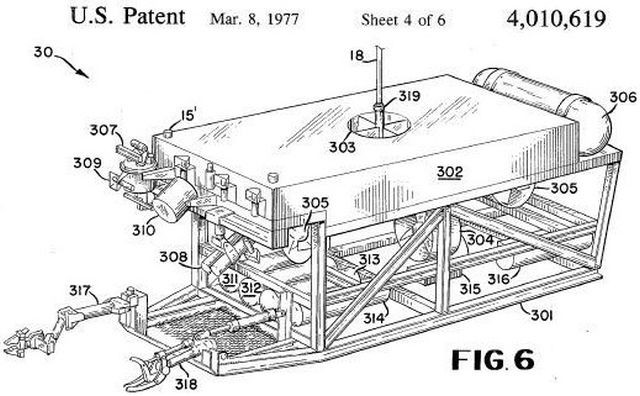
RUWS ARM The work system itself included a hydraulically powered, master/slave arm with seven functions including grip. The arm was terminus-controlled: the operator moved a simple pistol grip to control the position and orientation of the remote manipulator hand. It was also bilateral, or force-feedback: weights and forces encountered by the remote arm were reproduced at a scaled-down level in the master arm and thus felt by the operator. A second four-function arm or gripper, simpler and more rugged, was used to steady RUWS with respect to the work or work site.
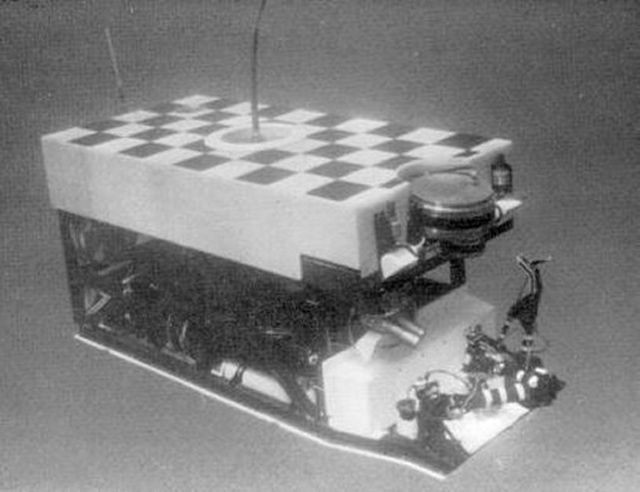
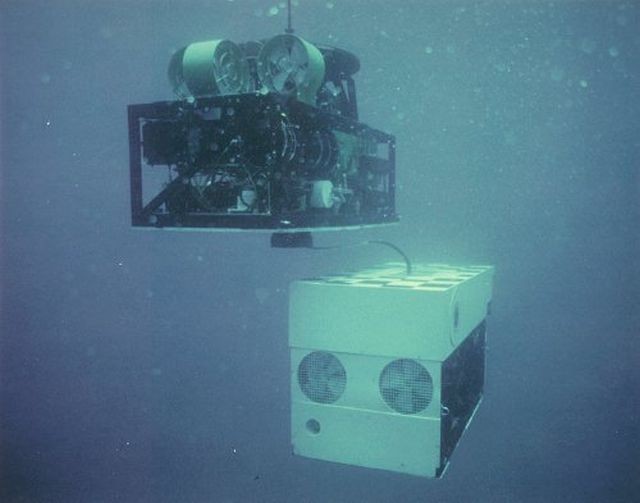
RUWS PCT The system actually consisted of two vehicles. The second was a heavy Primary Cable Termination (PCT) to which the work vehicle was firmly attached during deployment and recovery, and which carried a cable reel for the 850 foot neutrally buoyant portion of tether. The functions of the PCT were to maintain tension in the primary cable, provide position-keeping capability to its bottom end, and to launch and recover the RUWS vehicle itself. In affect, the PCT was a highly sophisticated plumbob, keeping the main umbilical section vertical and isolating the RUWS from its motions.
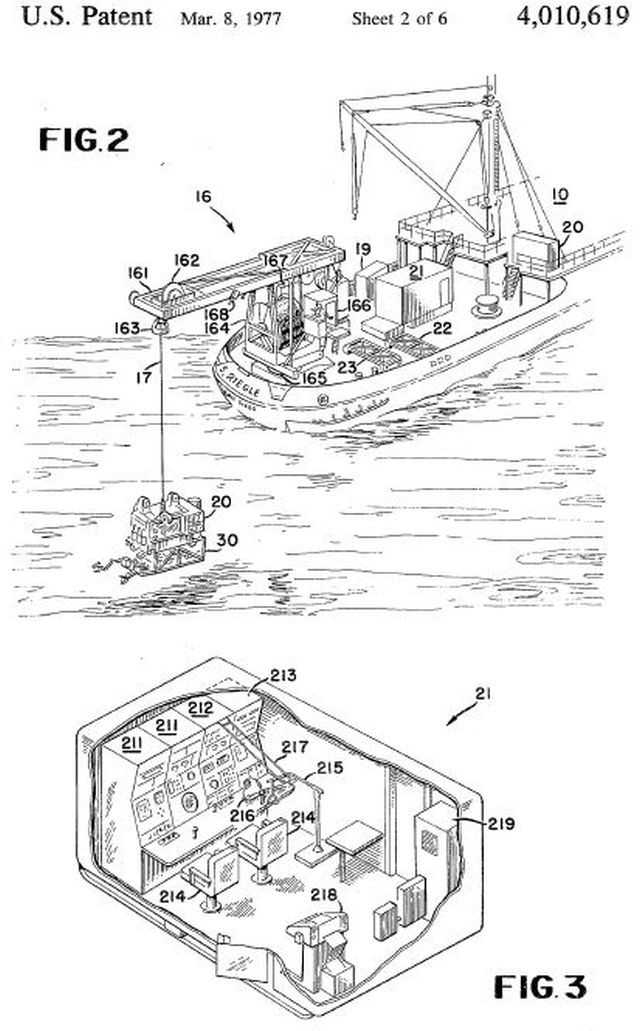
RUWS MCDHS Another vital component of the system was the Motion Compensating Deck Handling System (MCDHS), an extremely versatile combination of launch crane and cable reel. Its purpose was to launch and recover the RUWS vehicle/PCT combination and to tend the primary cable, minimizing ship-induced motion and tension therein. It was capable of operating in sea state three and recovery in sea state four.
RUWS was lost at sea in January of 1980. The cause was determined to be a design flaw in the mechanical attachment to the PCT. Search efforts proved futile due to the extremely rough scarp bottom. RUWS is currently undergoing what is termed "long-term corrosion tests" at 13,500 feet depth approximate 15 miles West of Kona, Hawaii. Source: here.

RUWS
Vehicle Name: Remote Unmanned Work System (RUWS)
Type Purpose: ROV/ deep general-purpose work
Initial Operation: 1975
Depth: 20.000 ft
Speed: 1.5 knots
Weight in Air: Vehicle 7.000 lb, PCT 5,500 lb
Dimensions: Vehicle 11' x 4.8' x 5', PCT 9.6' x 5' x 6' (L x W x H)
Power Requirements: 60 kW
Propulsion: Five hydraulic thrusters
Instrumentation: TV camera, 70 mm still camera, two manipulators, sonar, altimeter, digital magnetic compass
Navigation: Long baseline
Other: Two-unit system: RUWS and Primary Cable Termination (PCT) decoupling vehicle
Remote unmanned work system (RUWS) electromechanical cable system
Publication number US4010619 A
Publication type Grant
Application number US 05/689,306
Publication date 8 Mar 1977
Filing date 24 May 1976
Priority date 24 May 1976
Inventors John D. Hightower, George R. Beaman, George A. Wilkins, Douglas W. Murphy
Original Assignee The United States Of America As Represented By The Secretary Of The Navy
Abstract
A tethered underwater work system comprises a primary lift module attached to a support vehicle by means of a primary tether. A submarine work vehicle is removably attached to said primary lift module and connected thereto by means of a secondary tether. Additionally, the lift module contains electrical distribution systems to permit an extensive control and instrumentation linkage with the submarine work vehicle and remotely controlled manipulators mounted thereon.
STATEMENT OF THE OBJECTS OF THE INVENTION
It is accordingly an object of this invention to provide an improved tethered submarine vehicle.
Another object of this invention is to provide an improved tethered submarine vehicle.
Still another object of this invention is to provide a tethered submarine work vehicle which is adapted to perform work as great depths and to remain on station for a considerable length of time.
Another object of this invention is to provide an improved means for handling tethered submarine vehicles using a constant tension marine crane effectively connected to pay out and retrieve the vehicle cable.
Still a further object of this invention is to provide a tethered submarine work system comprising a pair of separable submarine vehicles.
These and other objects of the invention will become more readily apparent in the ensuing specification when taken together with the drawings.
……….Thus, the operator by making suitable physical movements of his head and arm may control both the view presented him and operate the manipulator. In this manner, a close approximation of diver presence in the underwater environment is achieved. The individual details of such control mechanisms are well understood in the art and may be incorporated in this invention following the well recognized design practice common to the marine engineering arts. For example, the manipulator 317 may be that shown in U.S. Pat. No. 3,703,968 issued on Nov. 28, 1972 to Richard W. Uhrich for "Linear Linkage Manipulator Arm." Similarly, the visual presentation system may, if desired, be that disclosed in U.S. Pat. No. 3,916,094 issued on Oct. 28, 1975 to F. A. Marrone for "Submersible Visual Simulator For Remotely Piloted Systems."…………….
See also RUWS' predecessor CURV here.
See other early Underwater Robots here.