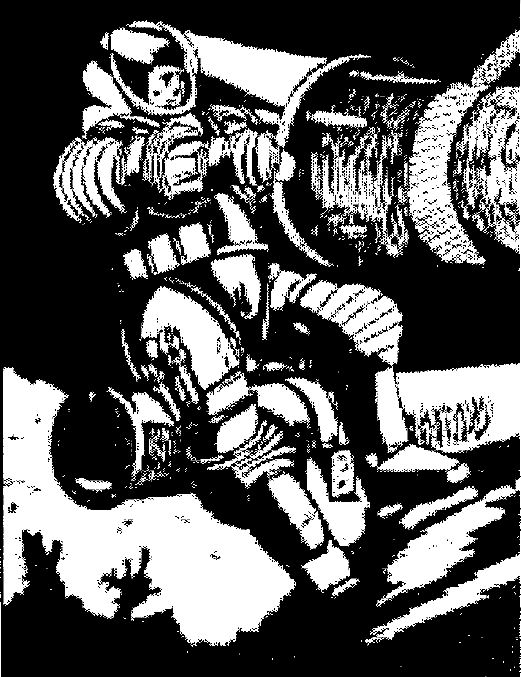
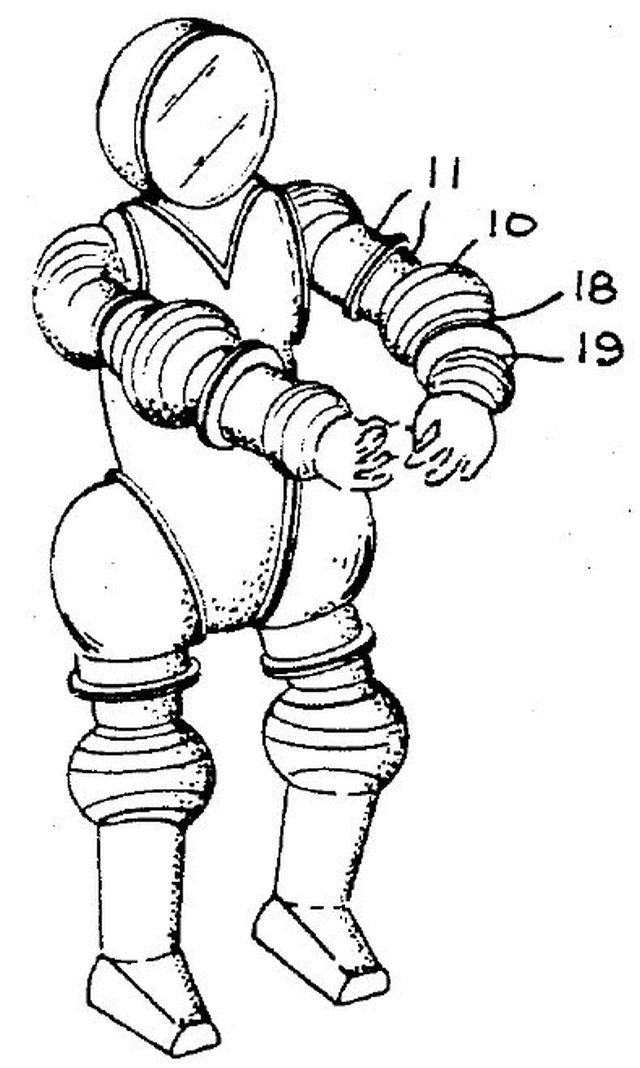
Figure 17: Conceptual drawing of the Litton atmospheric diving suit.
In the late 1960's Litton Industries Space Science Laboratories announced the development of a new design of an atmospheric diving suit (Figure 17) capable of operating to depths of 600 feet (Fonda-Bonardi, 1967). The UX-1, for underwater experimental, suit was to use a combination of constant-volume convolute joints and rotary joints.
Their basic principle was to place the geometric axis of the suit joints as close as possible to the anatomical axis of the operator's articulation. The suit design surpassed any that had been built to date, though it never made it to production. In 1974, prior to inventing the Newtsuit, Phil Nuytten bought all rights and patents to the Litton suit (Harris, 1985).
Source: A SURVEY AND ENGINEERING DESIGN OF ATMOSPHERIC DIVING SUITS – A REPORT by MICHAEL ALBERT THORNTON
Details of the suit design were presented at the Advanced Marine Vehicles Meeting in 1967 by Giusto Fonda-Bonardi, director of applied research, and Charles P. Buckley, manager of underwater system development at Litton.
1965 – "XU-1" Deep Sea Diving Suit – Fonda-Bonardi / Buckley for Litton Systems
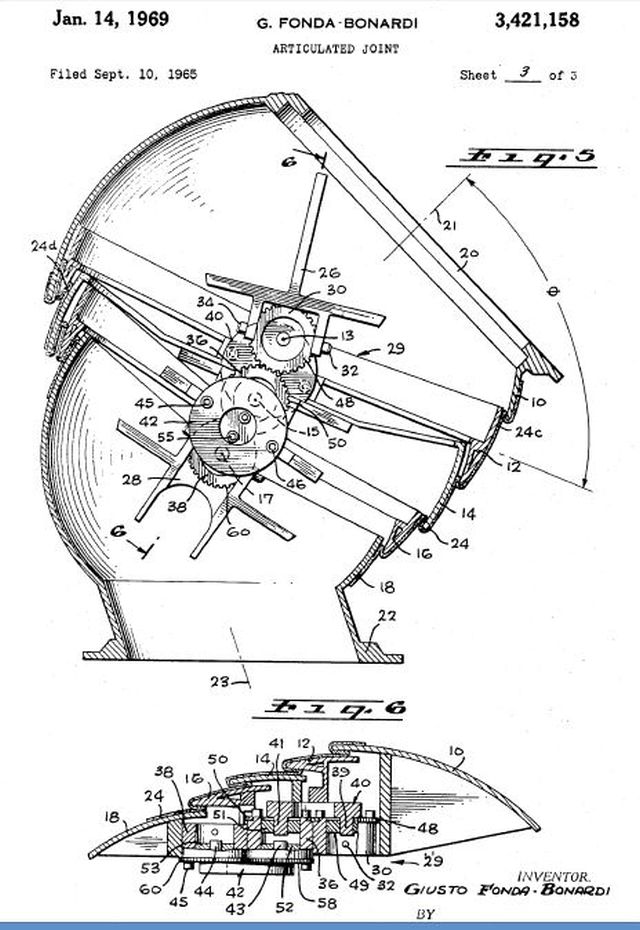
Name: Articulated joint
Publication number US3421158 A
Publication type Grant
Publication date Jan 14, 1969
Filing date Sep 10, 1965
Priority date Sep 10, 1965
Also published as DE1296042B
Inventors Fonda-Bonardi Giusto
Original Assignee Litton Systems Inc
ABSTRACT OF THE DISCLOSURE An articulated joint for interconnecting to portions of a deep sea diving suit which is adapted to enclose adjacent members of the human body, comprising a plurality of substantially spherical segments, including two end segments secured respectively to the adjacent portions of the diving suit, and at least one intermediate segment, adapted to be nested in a predetermined angular relationship as the joint is flexed. The segments are interconnected by at least one gear and linkage assembly for distributing an angle of flexure of the joint in a predetermined proportion among the segments and for reventing the segments from separating. The compressive force of the surrounding water on the spherical segments is transmitted through at least one roller assembly.
This invention relates to articulated joints for a low pressure diving suit, and more particularly to an improved form of articulated joint which maintains a constant displacement volume when flexed.
In a diving suit it is necessary to provide the wearer with an environment that will protect him and that will permit the accomplishment of useful functions. The articulated joints of the invention allow a mobility to the wearer which is comparable with that of a free swimmer, provide thermal protection to the wearer for long periods in cold water, and permit the air pressure in the suit to be maintained at a normal pressure of substantially one atmosphere.
In the prior art, numerous forms of articulated joints are employed for providing mobility to a diver. In the most common form of diving suit the joints form a part of a fabric suit attached to a rigid helmet. Protection from water pressure is afforded to the diver by maintaining the internal air pressure of the suit substantially equal to the external pressure. Subjection of the diver to extremely high air pressure has the disadvantage of a mandatory period of decompression when surfacing. A period of decompression limits the maximum operational period possible and prohibits immediate recovery of the diver in an emergency.
Some diving suits of the prior art employ joints which vary in displacement volume when flexed. A changing volume during flexure, particularly in a low pressure suit, requires that the diver expend energy on the surrounding water in addition to the energy required to perform a desired task.
Even in a suit using a constant volume joint, as the depth of the surrounding water increases, the joint may be incapable of carrying the increased load caused by the increased water pressure. Further, the increased water pressure may cause adjacent moving parts to bind due to friction between the parts, which requires excessive effort by the wearer to move the joint. Another problem encountered is that the bulk of the joint, e.g. thickness of material, packing, and the like, limits the allowable angle of rotation of the joint to substantially less than the range of flexure of the body members. The present invention, on the other hand, overcomes the foregoing and other disadvantages of the flexible joints of the prior art by providing improved constant volume joints which are completely flexible when subjected to pressure because auxiliary means are used to support the pressure load. The characteristics of the auxiliary means are such that friction between the parts is not increased with depth. In accordance with the concept of the invention, the constant volume joints comprise a pair of end segments, having the shape of spherical segments-of-one-base, with each contoured to form a port which adapted to receive the limb of a wearer; a plurality of ring-shaped intermediate spherical-segments-of-two-bases; a means for intercoupling the spherical segments to distribute the angle of movement of the joint among the segments and to carry compressive forces across the joint between the end segments; and a tubular section of flexible, non-permeable material, such as for example-rubberized fabric, affixed to each segment and circumscribing the intermediate segments to create a seal between the segments.
More specifically, a plurality of shells each having the form of a spherical segment, are interconnected to form a structure having the shape of a series of spherical segments of diminishing diameter, in which each segment is partially nested in the segment of next larger diameter. The segments are constructed to withstand compressive force and to maintain substantially constant volume when subjected to pressure. The segments are interconnected by gears and linkages so that, when a bending moment is applied to the joint, each segment rotates inside the segment of next larger diameter to permit the volume of the joint to remain constant throughout the range of flexure. The gears function to distribute, in a predetermined proportion, the angle of flexure of the joint, among the segments. The connecting linkages prevent the segments from separating. When the joint is immersed in a fluid, the pressure of the fluid on the joint tends to cause each segment to be enveloped in the segment of next larger diameter. Means for preventing the collapse of the joint in all relative angular positions of the segments, within the range of flexure, is provided by affixing a pair of rollers to each of the alternate odd segments. Each roller in the succession is held in pure rolling contact with adjacent rollers to bear the force of the fluid. Force on the alternate even segments of the succession is transmitted by the connecting linkages to the load bearing rollers. When the joint is flexed, a lune-shaped surface area on one side of each segment, defined by two intersecting great circles, is enveloped beneath the surface of the adjacent next larger segment. An equal lune-shaped surface area is exposed on the opposite side of each segment. Therefore, flexure of the joint does not change the surface area of the joint. Because of the symmetry of construction, provided by the spherical segments, the joint also maintains constant volume. Since the joint displaces a constant volume during flexure, it may be flexed without expending human energy on the fluid creating the outside pressure. A pressure seal between the surfaces of each shell is provided by a flexible, non-permeable fabric which convolutes over the enveloped areas and covers the exposed areas of the joint. As the joint is flexed, the fabric convolutes between segments without friction.
It is, therefore, an object of this invention to enclose a human being in an environment having a first fluid pressure, which environment is substantially constant pressure in the presence of surrounding higher fluid pressures.
It is also an object of this invention to allow movement of the enclosed human being without expending energy on the surrounding fluid.
It is a further object of this invention to improve constant volume joints for body-enclosing suits to reduce the energy expended by the wearer in moving the suit.
It is likewise an object of this invention to allow greater range of flexibility in the joints of diving suits.
It is also an object of the invention to provide for enclosing a diver or other person in a portable artificial environment corresponding to that existing at some relatively low altitude on the surface of the earth, which artificial environment is constant for any relatively lower depth and independent of the environment outside the suit.
It is an object of the invention to provide a diving suit adapted for use at great depths to maintain a substantially normal pressurized environment for the wearer.
It is an object of the invention to provide a constant volume diving suit adapted for use at great depths with flexible joint connections for facilitating maximum freedom of movement with minimum human energy expenditure.
It is an object of the invention to provide flexible joints which employ successive segments intercoupled to maintain the displacement of the joint substantially constant when it is subjected to pressure.
It is an object of the invention to provide flexible joints for withstanding compressive force when subjected to external pressure.
It is an object of the invention to provide flexible joints which maintain substantially constant displacement when flexed.
It is an object of the invention to provide flexible joints which employ successive segments intercoupled to prevent relative axial separation when a joint under pressure is flexed.
It is an object of the invention to provide flexible joints which employ successive segments intercoupled so that the angle of flexure is distributed into relative angular movement of the segments in a predetermined proportion.
It is an object of the invention to provide flexible joints which employ successive and interconnected segments for withstanding compressive force in any position of the joint Within a range of flexure.
It is an object of the invention to provide means for withstanding compressive force received in any direction within a range of operation.
It is an object of the invention to provide means for constraining relative angular displacement between structural elements to distribute, in a predetermined proportion, the angular displacement between said elements and for carrying compressive forces across said element.

Before the XU-1, Giusto Fonda-Bonardi designed a constant volume joint for a space suit. [Trivia – Before that, he was designing fusion reactors!]

Name: Constant volume joint
Publication number US3242499 A
Publication type Grant
Publication date Mar 29, 1966
Filing date Sep 7, 1962
Priority date Sep 7, 1962
Inventors Giusto Fonda-Bonardi
Original Assignee Litton Systems Inc

An earlier Litton space suit, the Mark 1.
Obituary – In Memory of Giusto Fonda-Bonardi
Giusto Fonda-Bonardi (89) passed away peacefully on May 16, 2011. Born April 15,1922 in Trieste, Italy he was commissioned at the Italian Naval Academy in 1943, and came to the US aboard an Italian submarine in 1944 to develop anti-submarine weapons with the U.S. Navy. In the ensuing 65 years he worked as a physicist and engineer in southern California's flagship companies such as Rotoflow, Power Industries, Litton and Hughes Aircraft. He developed over 39 patents in the fields of inertial guidance, radar and microwave applications, magneto-hydrodynamics, plasma containment, electronic circuits, space and underwater protective systems, thermo-dynamics and gas dynamics. For the last 25 years he managed his own consulting company, Meruit, specializing in computation fluid dynamics and expander-compressor systems. As a life senior member of the IEEE, Mr. Fonda-Bonardi published extensively in scientific journals throughout his professional career. He recently wrote a book entitled The Persistence of Myth.
See other early Underwater Robots here.