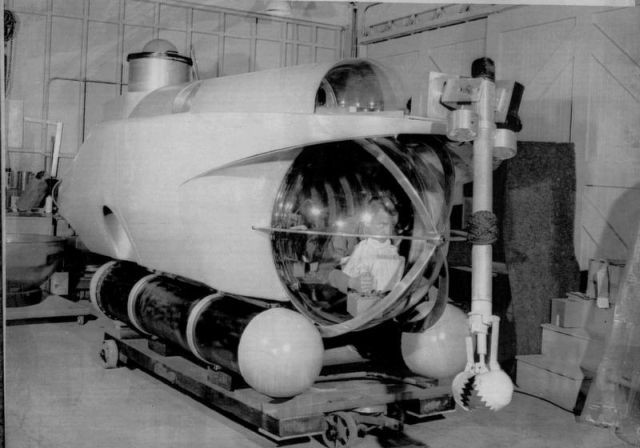
Project initiated in 1965 headed by Willis "Will" R. Forman (seen lying down in the above image).
Launched in September 1971.
A single mechanical arm with only three degrees of freedom and claw gripper.
See Deep-View – 23:40 into the clip.
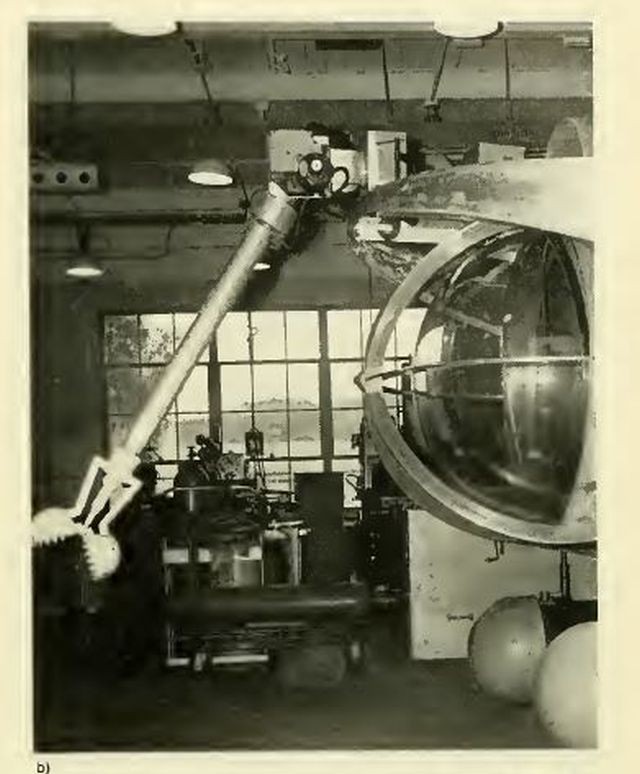
"That's a 44 1/2 -inch-diameter glass hemisphere streamlining the bow of the Navy's latest submersible, Deep View. The 300-lb. borosilicate glass dome, made by Corning, will give observers wide-angle views down to 1,500 feet-over twice the depth possible with plastic domes." Text source: Popular Science Apr 1972.
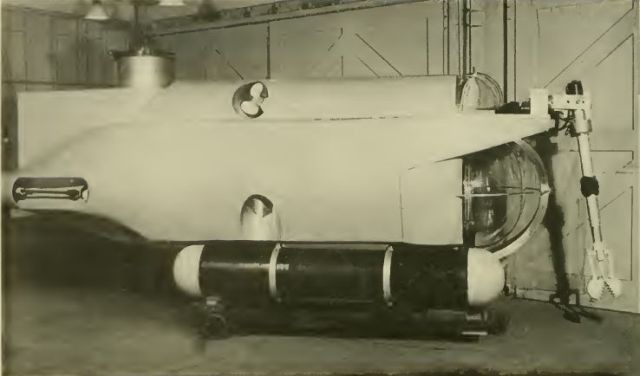
Project Deep View is the first submersible to incorporate glass for a significant portion of the pressure hull. It represents the first full-size manned experiment with high strength to weight transparent hulls. In a brief few years of submersible operations pilots and observers have learned the limitations of view port vision and a few have observed the maximum effectiveness obtained through transparent hulls (Sea-Link, Nemo, Kumukahi). As time continues and experience builds the glass and glass-ceramic transparent hulls continue to appear as the next step for going deeper. The difficulties in using presently available glass are due to the present low quality, brittleness and the physical properties mismatch with other high strength materials. Techniques for quantitative stress analysis were developed and comparative experiments with numerous glass to metal joints were conducted until the final design was obtained. The various subsystems are briefly described as well as the sequential testing of the pressure hull, environmental propulsion, etc. and test operations to date.
Published in: Engineering in the Ocean Environment, IEEE 1971 Conference 21-24 Sept. 1971, Page(s): 294 – 297.
The glass dome developed catastrophic cracks after repeated usage and the project was abandoned soon after. Technology at the time was not advanced enough to overcome the manufacturing problems to prevent these issues.
See other early Underwater Robots here.