1964 onwards – Marine Mammals and Ordnance Recovery

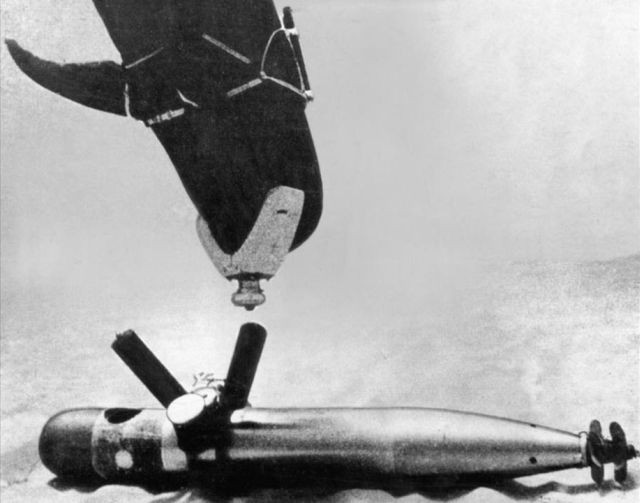
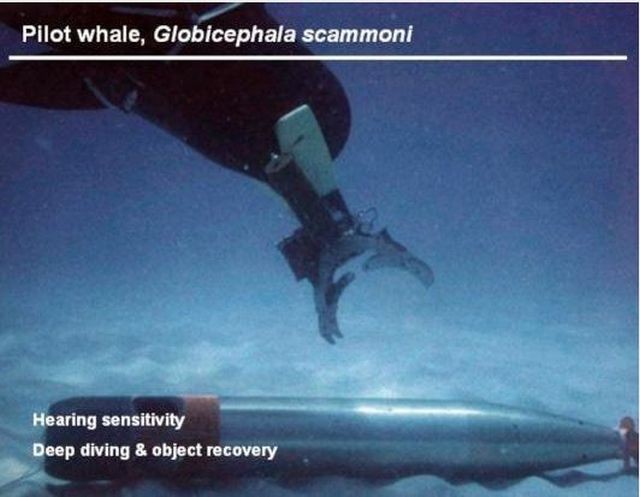
Ahab, a 5,500 pound killer whale, recovers a piece of inert ordnance using an acoustic pinger to guide him during the Deep Ops project. The whale is also equipped with a grabber device and a hydrazine system to allow the object to float easily to the surface. -Photo.
Porpoise / Dolphins:

Source: Extract from Popular Mechanics, July 1967.
"Aside from the porpoises, a number of other marine animals are being considered for underwater work. There's even hope of employing some of the smaller whales for special tasks, such as hauling heavy cargoes along the bottom. Preliminary work with pilot whales at Marineland of the Pacific shows that they echo-locate in the same way as do porpoises, that they are intelligent, and possibly can be trained more rapidly than porpoises because they usually calm down more quickly after capture. Pilot whales (17 feet long, 3000 pounds) have been taught to leap high in the air for food and to perform other stunts. In fact, a big false killer whale at Marineland of the Pacific began doing out-of-water back-flip leaps after watching trainers teach this stunt to a porpoise. It was worked in as part of her regular performance from then on.
Sea lions (the "trained seals" of circuses and zoos) and some other members of the seal family may get regular jobs with the Navy, too. Sea lions have excellent eyesight, as research at Stanford Research Institute has shown, and very good directional hearing, although their sonar ability appears to be rudimentary at best.
All in all, don't be surprised if the Navy starts a brand-new kind of enlistment program in the future, for sea lions, dolphins and whales! "

Title : Project Deep Ops: Deep Object Recovery with Pilot and Killer Whales : Report Date : NOV 1972
Descriptive Note : Project summary rept. Aug 1969-Nov 1971
Corporate Author : NAVAL UNDERSEA CENTER SAN DIEGO CA : Personal Author(s) : Bowers, Clark A. ; Henderson, R. S.
Abstract : Two species of whales, killer whales (Orcinus orca) and pilot whales (Globicephala scammoni), were conditioned to locate and mark for recovery pingered cylindrical objects in the open ocean. The animals were conditioned to boat-follow, wear harnesses with radio backpacks, and deploy mouth-carried recovery hardware. An automatic direction-finding radio tracking system, originally developed for studies of wild marine mammals, was adopted and transformed to a system which is practical and reliable for day-to-day use with trained whales in the open ocean. The killer whales dived to maximum depths of 850 feet and 500 feet to deploy practice grabbers. The pilot whale deployed a practice grabber at a depth of 1654 feet and on one occasion apparently made a volunteered dive (without practice grabber) to a depth of 2000 feet. Float-line recovery devices proved ineffectual, leading to the development of a hydrazine lift system, which was fitted to the operational Grabber and is capable of lifting 600 pounds from 1000 feet. The pilot whale aided in the recovery of a dummy Mk 46 torpedo from 500 feet with this device, and during an earlier training session deployed the hydrazine system on the same target at a 1000-foot depth.
On 15 November 1971 Morgan successfully deployed the hydrazine lift system and effected the recovery of a dummy Mk 46 torpedo in 500 feet of water. The recovery site was approximately 5 nautical miles from Sag Harbor. On one other occasion Morgan deployed the hydrazine unit on a 1000-foot-deep target; however, the grabber did not attach properly. Subsequent attempts were frustrated by inclement weather and heavy seas, and the project was officially concluded on 1 December 1971..
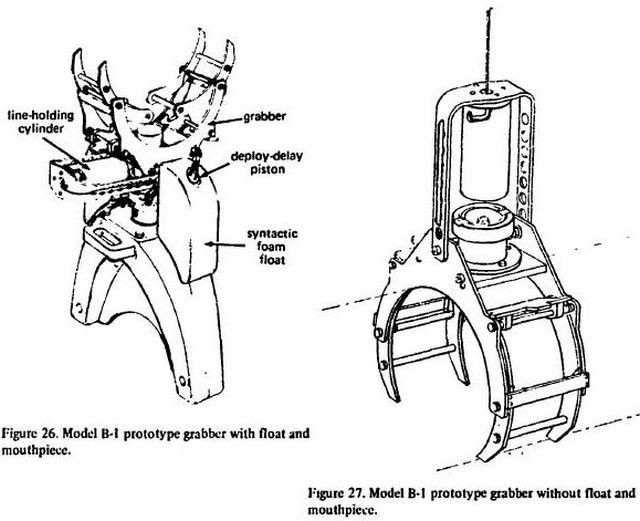
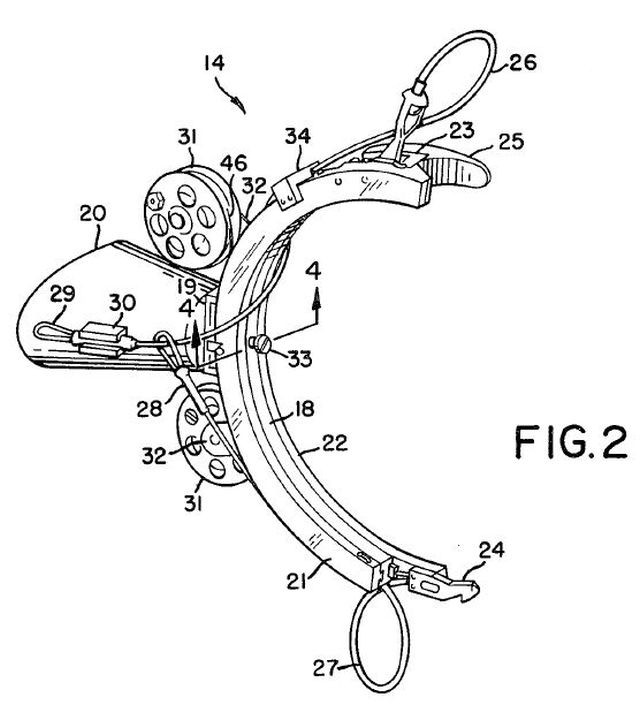
Prototype grabber
In February 1970 the design of a prototype grab device was started. The approach used was to adapt a grabber to the practice grabber release mechanism and mouthpiece. With proper placement and actuation, grab arms were to lock around a cylindrical target and separate from the mouthpiece. A float with a retrieval line would then deploy to the surface.
From several primary designs of varying types, a dual-arm device with distending tubular grab arms was chosen. Fabrication of this grabber (model A-1) was completed in May 1970. Preliminary tests with it indicated problems in the extension of the arms from their tubular sockets. Dissatisfaction with this model prompted the design and fabrication of model B-1 .
The model 13-1 grabber (Fig. 26 and 27) was made of 1/4-inch aluminum plate and utilized rotating closure arms rather than distending arms. When pressed against a target and in the proper orientation, the closure arms are forced to rotate and close into circular form and lock into rocking ratchet plates.
Model B-1 CAMLOC.
A practice grabber with a new release mechanism was tested with Ahab in March 1970. On this device a quick-disconnect air line fitting replaced the cam-locks as the connecting link. These new fittings were superior in reliability and durability and were thereafter used on all practice and operational grabbers.

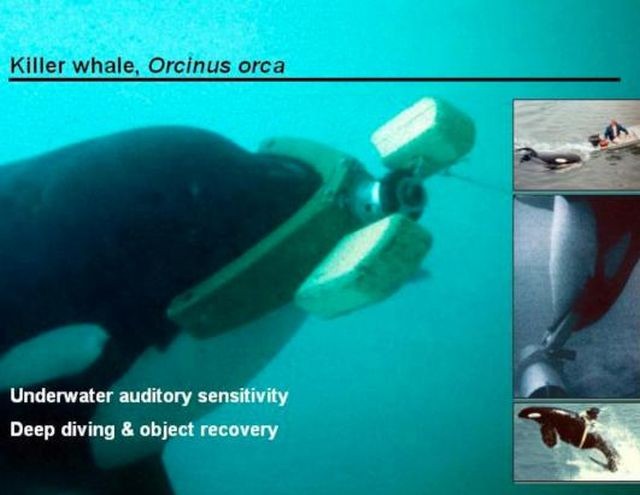
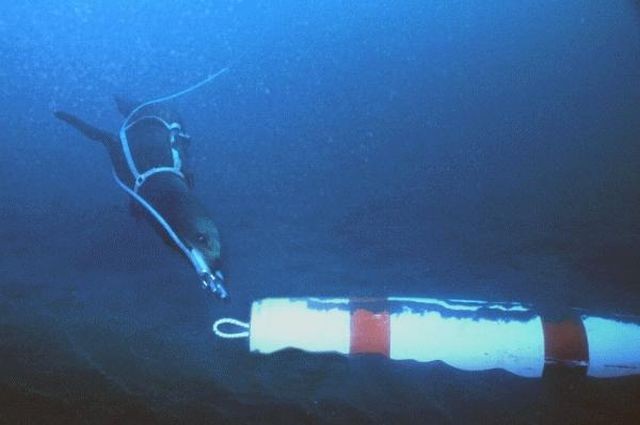
A 1,200 pound pilot whale carrying a recovery device in his mouth makes a preliminary pass over a dummy torpedo. Photo taken Oct. 1972.
It was obvious that a float-line method would not work for a system capable of recoveries at depths greater than 1000 feet. In December 1970 development was begun of a hydrazine monopropellant gas generator lift system for deep recoveries. All the components of this system were to be carried on the grab apparatus. and no lines were to be used.
Don Miller. the Navy's leading expert in hydrazine lift systems. was transferred from China Lake, California. to NUC, Hawaii. to design and supervise fabrication of the self-contained lift system. Development began in mid-February 1971, and by early June 1971 a prototype device was ready for testing.

Press Photograph: In this 1972 Navy photograph, a pilot whale at the Naval Undersea Reseach and Development Center's Hawaii laboratory prepares to fasten a grabber claw to a torpedo. "Morgan" presses a grabber claw against a target. locking the lilt device onto a torpedo on the sea bottom As he pulls away, the mouthpiece separates, activating a system that inflates a balloon and floats the torpedo to the surface. JUNE 11, 1989

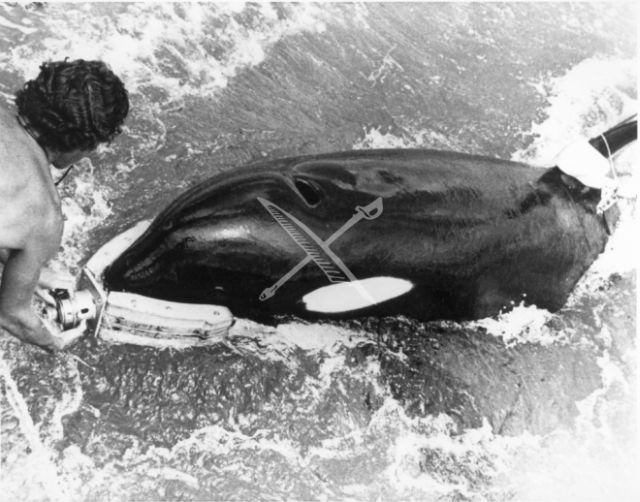
Ahab, a 5,500 pound killer whale, accepts a grabber device from his trainer during the Deep Ops project. The device is used for deep ocean ordnance recovery. Photo circa 1985.
Beluga Whales:

Since the early 1960s the United States had been deploying marine mammals, beginning with dolphins, for tasks including mine detection and recovery of test torpedoes. By the mid-1970s, the locus of the naval cold war had shifted to the Arctic, where the latest Soviet submarines were secreting themselves under the ice cap, an environment off-limits to animals including dolphins and sea lions used in the Navy Marine Mammal Program (NMMP). Experiments commenced on weaponry that could function in such extreme conditions. The Navy needed marine mammals with built-in sonar, capable of locating and retrieving sunken experimental torpedoes in the frigid waters and low visibility of the Arctic.
…………
The new Cold Ops recruits proved not only to be remarkable divers, ultimately reaching preset platforms at depths of over 2,000 feet, but pinpointing retrievers as well. Belugas evolved their precisely honed echolocation powers in order to both navigate the Arctic’s dark waters and to find available pockets of breathing air between the ocean surface and the underside of the ice cap. Pinging on mud-embedded test torpedoes proved, by comparison, an easily dispatched task. They would also learn to wield a mouthpiece with a special “grabber assembly” for retrieval of the torpedoes from the ocean floor.
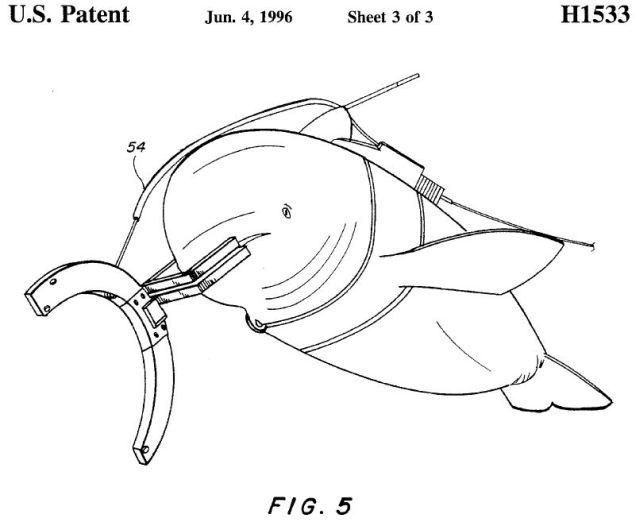
Beluga whale object recovery system
Publication number USH1533 H
Publication date 4 Jun 1996
Priority date 19 Aug 1985
Inventors Clark A. Bowers, Donald Miller
Original Assignee The United States Of America As Represented By The Secretary Of The Navy
Abstract
A method of recovering an underwater object wherein a beluga whale wears aackpack harness, beaches into a boat with beaching capabilities and is transported to an area of work. The beluga whale is trained to then follow small boats, carry attachment hardware using a bite plate connected to the hardware, carry tow lines and buoyancy modules from the surface, dive and then locate and deploy the attachment hardware onto the non-pingered target.
Description
BACKGROUND OF THE INVENTION
There are several ranges in the Pacific and Northwest where torpedoes are fired and recovered routinely. Computerized operations, tracking, and test facilities, control, monitor, and direct range activities at each site. Underwater sounds and surface craft activity are tightly controlled, which helps range operators assure successful torpedo firings. Sophisticated underwater hydrophone arrays are used to keep track of run and end-of-run positions of test weapons. Surface craft with directional underwater sound receivers are used to pinpoint the torpedo's location.
Large recovery craft capable of deploying a variety of tethered vehicles are vectored to recovery sites. Tracking data help provide information about the torpedo's condition such as whether it is floating, lying on the sea floor, or partially or fully buried. The recovery craft usually lowers the vehicle to assess torpedo status, to make the recovery, or to determine if another vehicle will be required to assist with recovery. Recovery operations are manpower intensive and can be extremely time consuming and costly.
Successful recoveries are a function of a number of factors independent of such obvious variables as sea state, weather, hardware, personnel, and support craft capability. For example, torpedoes are equipped with acoustic beacons (pingers), but if the pinger malfunctions, torpedo recovery is often impossible. Or, if the torpedo drops into a bad location, such as under cables, next to hydrophone arrays, or in crevices on the bottom, or floats in the water column, recovery operations become very difficult.
Improvements in recovery techniques and equipment, i.e. improvements that will cut costs, save time and reduce manpower are important to range operations.
The Navy has conducted research on several marine mammal systems which were devoted to solving or aiding recovery operations. It has been demonstrated in various projects that sea lions, dolphins, killer whales, and pilot whales can be trained to work in the open ocean and perform a variety of tasks. These animals have all learned to carry and attach devices to targets emitting acoustic signals.
Although the Navy projects have demonstrated a variety of recovery capabilities, information now available indicates that the project animals previously used may have operational limitations in cold and fresh water or in areas of low salinity or at deep diving depths in excess of 1,000 feet.
SUMMARY OF THE INVENTION
In accordance with the discoveries and invention of the method disclosed, the foregoing problems with underwater recovery operations are overcome as follows. Particularly, applicants have discovered that beluga whales have sonar and deep diving capabilities and that these animals can be trained to utilize these capabilities for recovery of pingered as well as non-pingered objects in water. More particularly, applicants have discovered and invented a system for providing a safe, rapid and economical means of marking and/or recovering acoustically active (pingered) and acoustically passive (non-pingered) objects from within a body of water and/or on the ocean floor. The beluga whale object recovery system has the advantages over other systems such as tethered remote controlled underwater vehicles and manned submersibles of simplicity, lack of requirement for large, expensive and sophisticated support equipment, rapid deployment capability, hardware attachment capability and also the ability to operate in strong currents and turbid waters.
The beluga whale recovery system of the present invention includes a trained beluga whale that performs the following behaviors. Upon command the trained beluga whale will beach itself onto a floating platform or modified boat. The beluga whale will allow itself to be transported on the platform or boat to the area of water to be searched. At the search area, the beluga whale is trained such that, while free swimming, it follows a small boat from its home base floating net pen or modified boat to the search area and then returns. Upon command, the beluga whale accepts a mouthpiece with associated attachment hardware. Utilizing its acoustic homing capabilities, it is trained to locate a pingered or non-pingered cylindrical object on the ocean floor or in the water column. It is then trained to dive down and attach the attachment hardware to the cylinder. The attachment hardware carries with it a lift line so that the underwater object may then be lifted via the lift line to the recovery boat.
OBJECTS OF THE INVENTION
Accordingly, it is the primary object of the present invention to disclose an underwater recovery method and system that is extremely simple and has no requirement for large, expensive and sophisticated support equipment.
It is a further object of the present invention to disclose an underwater recovery method that can be rapidly deployed and has the capability of operating in strong currents and turbid waters.
It is a concommitant object of the present invention to disclose an underwater recovery system using marine mammals that can be trained to locate non-pingered targets.
It is a still further object of the present invention to disclose an underwater recovery system that requires minimal support equipment and relatively few personnel for its operation.
It is another object of the present invention to disclose a beluga whale underwater recovery system that has the capability of recovering targets at relatively deep depths, e.g. 1300 feet.
Other objects, advantages and novel features of the invention will become apparent from the following detailed description of the invention when considered in conjunction with the accompanying drawings.
Sea Lions






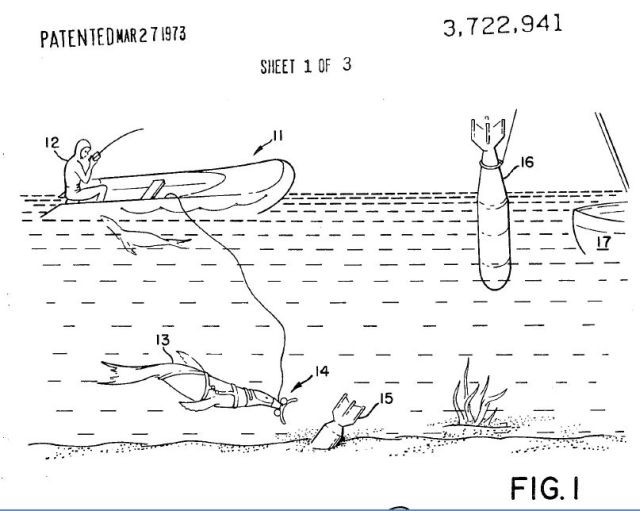
Marine mammal underwater attachment and recovery tool
Publication number US3722941 A
Publication date 27 Mar 1973
Filing date 3 Feb 1972
Inventors Ashenden E, Seiple R, Webb R
Original Assignee Us Navy
Abstract
An attachment and recovery tool for recovery of underwater objects has two telescopically extending arms which together with a central portion encircles the object to be recovered. The telescopically extending arms are urged into object engaging position by spring motor means mounted on the central portion. Latch units mounted on each telescopic arm secure them in encircling engagement with the object to be recovered. Cable means carried by said latch means cooperate with a lifting line to raise the object to the surface.

Trained Navy dolphins losing out to robots
December 2nd, 2012 by Associated Press
SAN DIEGO – Some dolphins used by the Navy to track down mines will soon lose their jobs to robots – but they'll be reassigned, not retired. Starting in 2017, 24 of the Navy's 80 military-trained dolphins will be replaced by a 12-foot unmanned torpedo-shaped vehicle, according to UT San Diego. The military said the machines can do some of the same mine-hunting duties as the sea creatures. And they can be manufactured quickly, unlike the seven years it takes to train a dolphin. But the dolphins won't be relieved of duty. They'll be used along with sea lions for port security and retrieving objects from the sea floor, the newspaper reported. The Navy's $28 million marine-mammal program dates back to the late 1950s and once included killer whales and sharks. Based in San Diego, it currently uses 80 bottle-nosed dolphins and 40 California sea lions. In recent years, dolphins have been deployed to Iraq and Bahrain to patrol for enemy divers and mark the locations of mines. Using their innate sonar, the mammals find and mark mines in shallow water, in deep water when tethers are used, and on the bottom where sediment cover and plant growth can hide the devices. Dolphins are carried aboard Navy ships in large movable pools, about 20 feet in diameter. Dolphins traveled on the amphibious ship Gunston Hall in 2003 for the Iraq war. Most of the Navy's dolphins and sea lions are housed at Point Loma Naval Base, in pools sectioned off from the bay. Others guard Navy submarine bases in Georgia and Washington state, according to UT San Diego. The military is responsible for the mammals' care throughout their lives, even after they're retired from active duty. Sometimes Navy dolphins are loaned to animal parks, such as Sea World, later in life.

How to: A dolphin model is wearing some of the specially designed kit in a military museum.
The Ukraine Army has been using dolphins and seals since the 70s. After the fall of the USSR, the 'dolphin spies' remained in the Ukraine. The dolphins have been trained to hunt for mines and plant bombs. They can also attack divers with knives or pistols attached to their heads. Now, military dolphins in Crimea will be transferred to the Russian Navy.
By Will Stewart for MailOnline, Published: 22:09 EST, 26 March 2014 | Updated: 06:28 EST, 27 March 2014
Ukraine's secret unit of spy dolphins and seals have defected to Russia and are now swimming under Kremlin orders, officials revealed today.
The Army has been using the underwater mammals since the 70s, and they remained under Ukrainian command after the collapse of the Soviet Union.
The bottlenose dolphins are trained to hunt for mines, plant bombs on hostile ships or attack enemy divers with special knives or pistols fixed to their heads.
The use of bottlenose dolphins as naval assets was begun during the Cold War in Sevastopol by the Soviet Union in 1973. With the collapse of the USSR, they were enlisted in the Ukrainian navy.
Now after the Russian repossession of the Crimean peninsula this month, it was revealed today that the combat dolphins are now back under Kremlin control along with all 193 military units in the region.
‘The military dolphins serving in Crimea will be transferred to the Russian Navy,’ reported state-owned Russian news agency RIA Novosti.
In fact, Ukraine announced last month it was preparing to cease naval training with the mammals, so the Russian annexation of the Black Sea region has probably saved the unique underwater force.

Search and rescue: Dolphins were sent out on bomb missions where the army did not want to risk the life of a diver
Source: Future Life, March 1980.
…..When he has the time, Rick [Sternbach] likes to go scuba diving and he is a professional marine mammal photographer. That interest, coupled with his technology bent, led him to create the spacefaring dolphin on the cover of this magazine.
This vision, which he titles "Cetacean Tomorrow," may at first appear more comic than cosmic, but Rick has concocted a nearly believable explanation for his imaginative sane: "He's a Pacific Bottlenose Dolphin, Tursiops gilli," Rick says, "born on December 3, 1985, at the San Diego Marine Mammal Facility of the National Aeronautics and Space Administration. The dolphin has been trained to use a pressure suit specially developed for space-traveling cetaceans. The suit contains a radar-to-sonar converter so the dolphin can scan in-space objects the same way he would underwater. It's also outfitted with a radio, an attitude control system using liquid nitrogen gas jets, a water circulation system and filter to keep his skin wet and clean (dolphins generate almost an entire layer of skin every day), and finally, a set of manipulators for working inside and out."
It may sound strange, but Rick's intent is not idle fantasy. "The theoretical capabilities of both the suit and the dolphin have been checked out by cetacean trainers and veterinarians," Rick reports. "They all agreed that it's 'different,' but nobody could see any major obstacles."
See other real early Underwater Robots here.