RUM – Remote Underwater Manipulator
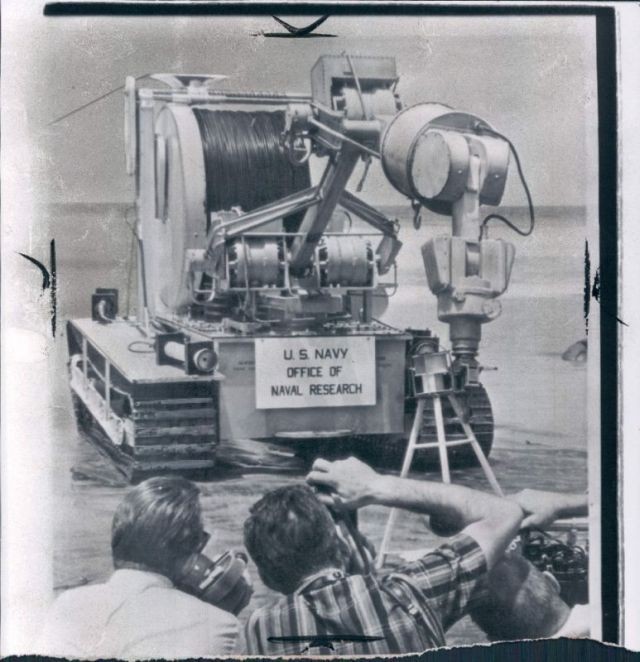
Press Release: U.S. Navy reveals new remote control vehicle for exploring ocean bottom.: A unique remote control undersea vehicle for exploring and conducting scientific studies of the ocean bottom for prolonged periods at great depths has been developed for the Office of Naval Research. The new vehicle was demonstrated for the Press off the shore of La Jolla, California, May 16. 1960. The vehicle is essentially a tank equipped with a long jointed manipulator arm and hand together with specially devised underwater television cameras which serve as the eyes of the vehicle's operator on shore. The development of the Remote Underwater Manipulator was directed by Dr. Victor Anderson of the Marine Physical laboratory of the Scripps Institution of Oceanography of the University of California at La Jolla for use in co-operation with the Hudson Laboratory of Columbia University. The goal of the Navy R.U.M. developments is to have available a vehicle capable of performing controlled work functions is oceanographic research. This includes observation of the sea floor, the collection of samples and specimens and the assembly and installation of deep bottom-mounted instrumentation in the ocean. R.U.M. (Remote Underwater Manipulator) can operate at depths down to 20,000 feet, maintained a speed of 3 miles per hour where level bottom soil conditions permit. It can manoeuvre and operate on grades of 60 percent and is capable of climbing a vertical obstacle 12 inches in height. It is seen here returning from ocean floor during tests.
Source: SIO Reference 60-26
MPL EXPERIMENTAL RUM
Victor C. Anderson, University of California, La Jolla Marine Physical Laboratory of the Scripps Institution of Oceanography San Diego 52, California
Abstract
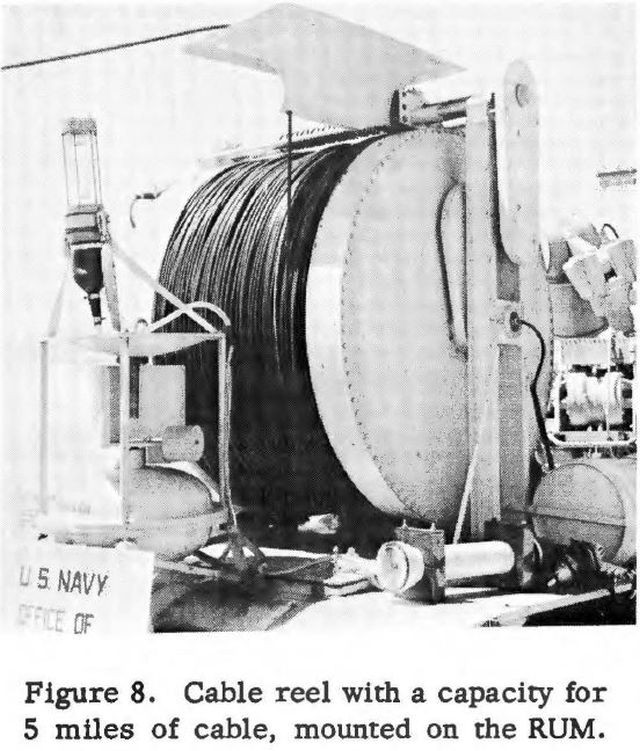
An experimental Remote Underwater Manipulator constructed at the Marine Physical Laboratory is described. Features of the design which permit operation at deep submergence in the ocean over 5 miles of small coaxial cable are discussed. Pertinent electronic circuits are shown and their general operation outlined.
Introduction
In November of 1958 the Marine Physical Laboratory undertook the construction of an experimental Remote Underwater Manipulator (RUM) as a part of a task, under Contract Nonr 2216 with the Office of Naval Research. It was felt that by the adoption of a suitable design philosophy such a device, capable of operating at great depths, could be built utilizing, to a large extent, standard commercial components. Operating from a fixed installation over a length of several miles of control cable, the RUM would permit a significant increase in underwater installation work capability and a reduction of the required complexity of bottom-mounted oceanographic instrumentation.
The first tests of the MPL RUM were carried out in the San Diego Bay in May of 1959. The first ocean test was made on 5 May 1960.
This initial report covers the RUM design and construction in a manner which will outline the problems arising during its construction and describe their solution as well as present the philosophy followed in the design.
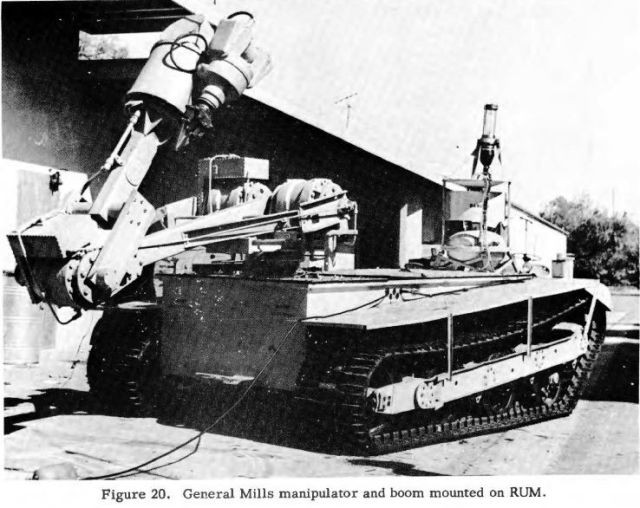
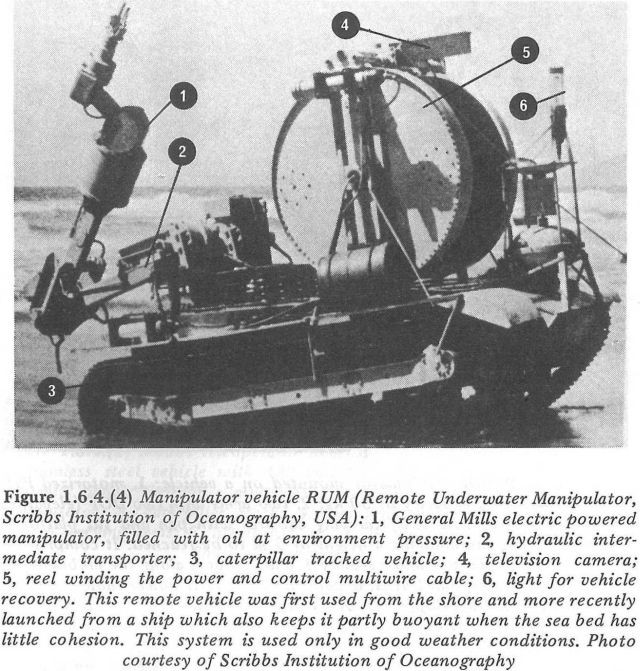
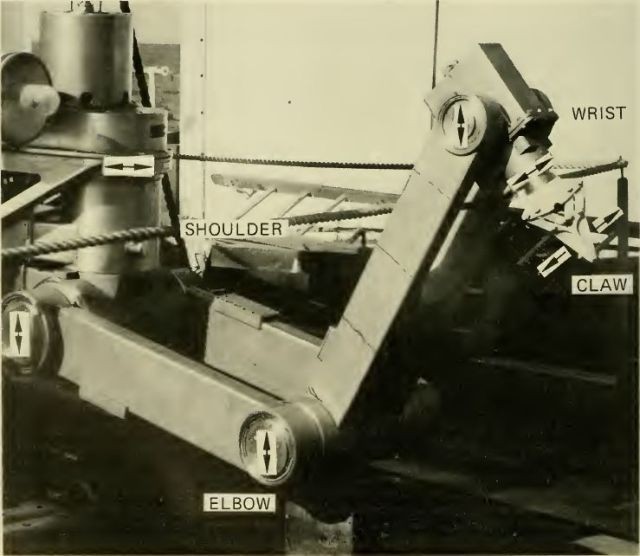
The manipulator for the MPL RUM was obtained from General Mills as a complete assembly ready for installation in the rear compartment. As may be seen in Figure 20 it consists of a model 500 manipulator arm mounted on the end of an articulating boom which has three degrees of freedom: base rotation, lower boom elevation and elbow elevation between lower and upper boom. The manipulator itself has the standard set of 5 motions: shoulder rotation, shoulder pivot, elbow pivot, wrist rotate and hand grip. These functions, combined with power on-off, fast-slow and forward-reverse control, require 18 of the off-on control channels. The manipulator capabilities are as follows:
Gross lifting capability with hook . . . 1500 lbs at 10 ft
Maximum outreach . . . 15 ft
Manipulator lifting capability . . . 500 lbs
Wrist torque . . . 100 ft -lbs
Hand closing force . . . 100 lbs
The manipulator arm itself is powered by dc motors while the boom operates from a hydraulic system position servo-coupled to dc control motors.
Hull Construction
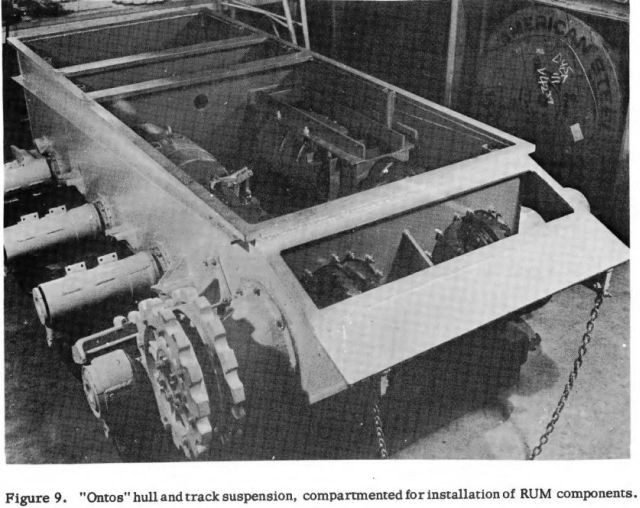
The MPL RUM has been built on the basic hull and track assembly of an M-50 self-propelled rifle or "Ontos," provided for this purpose. The Ontos was stripped and reworked to provide four compartments as shown in Figure 9 above.

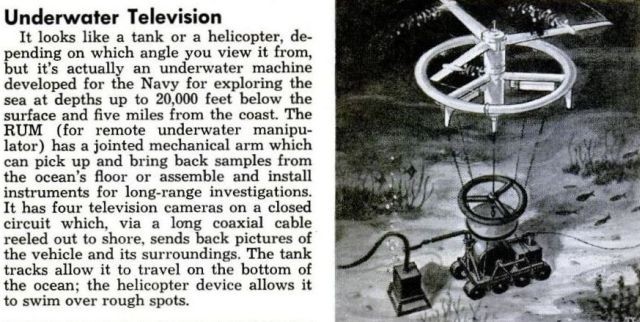
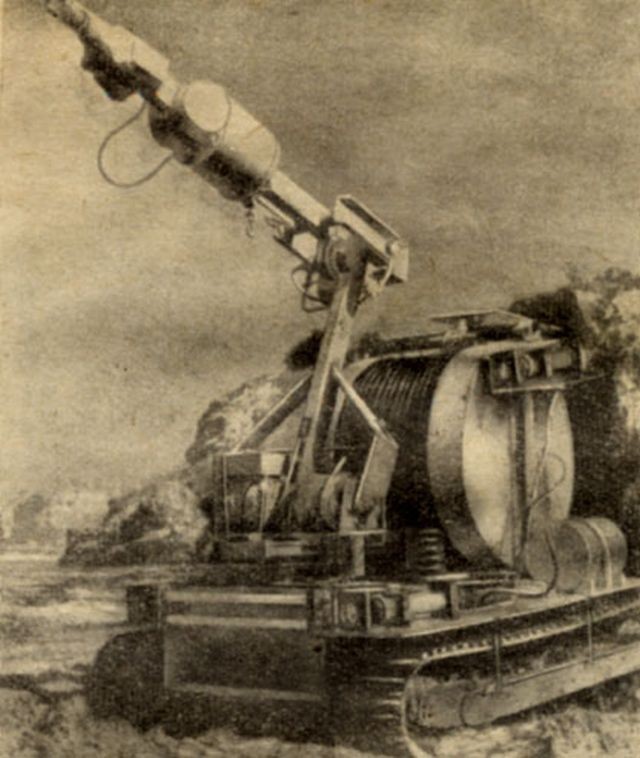
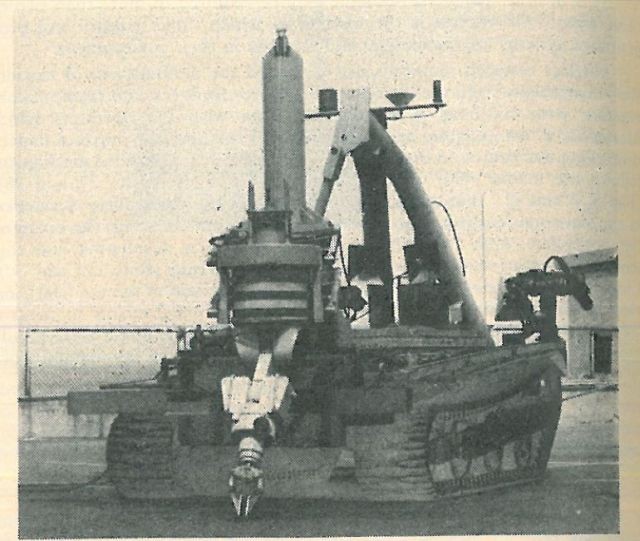
Interesting in the above artist's conception is the adaption of a helicopter device to allow RUM to swim over rough spots.
Source: Popular Mechanics, December 1960.
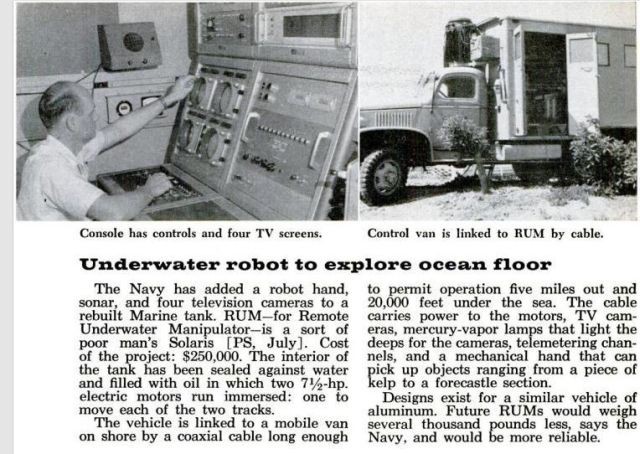
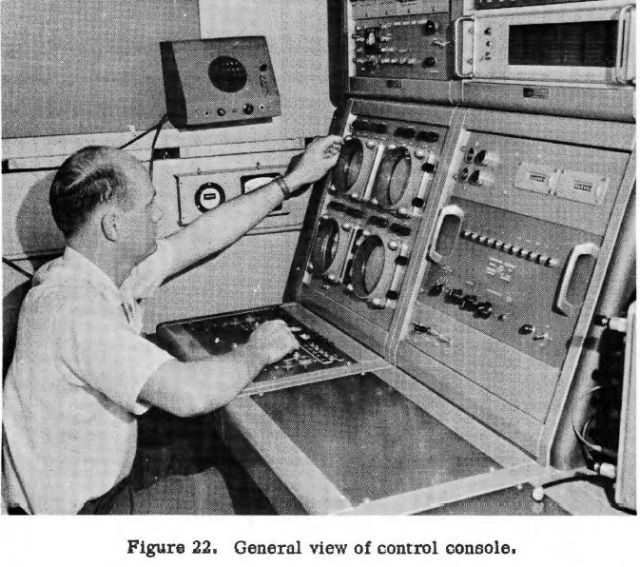
Underwater robot to explore ocean floor
Console has controls and four TV screens.
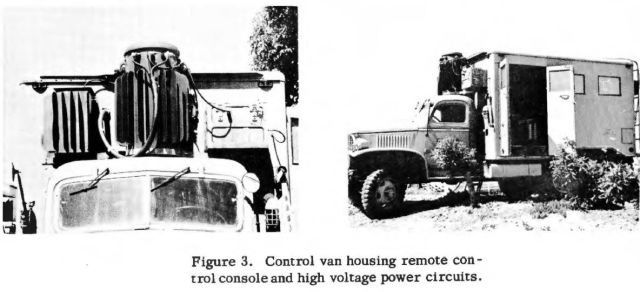
Control van is linked to RUM by cable.
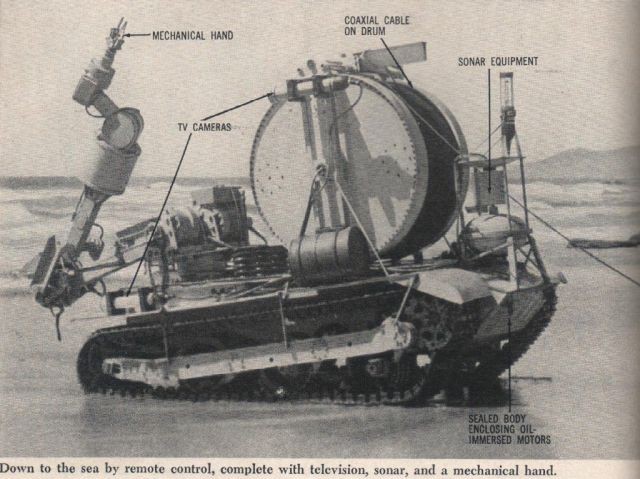
The Navy has added a robot hand, sonar, and four television cameras to a rebuilt Marine tank. RUM—for Remote Underwater Manipulator—is a sort of poor man's Solaris [PS, July]. Cost of the project: $250,000. The interior of the tank has been sealed against water and filled with oil in which two 71/2-hp. electric motors run immersed: one to move each of the two tracks.
The vehicle is linked to a mobile van on shore by a coaxial cable long enough to permit operation five miles out and 20,000 feet under the sea. The cable carries power to the motors, TV cameras, mercury-vapor lamps that light the deeps for the cameras, telemetering channels, and a mechanical hand that can pick up objects ranging from a piece of kelp to a forecastle section.
Designs exist for a similar vehicle of aluminum. Future RUMs would weigh several thousand pounds less, says the Navy, and would be more reliable. Source: Popular Science, Aug, 1960.
The Remote Underwater Manipulator (RUM) was first intended to work alone, crawling about on the sea floor at depths down to 6,000 meters to gather objects and samples, to take photographs, and to install deep-sea instruments. Victor C. Anderson began assembling it in 1958, starting with a Marine Corps self-propelled rifle carrier; to this he added a boom and a steel claw that could be pivoted in any direction out to about five meters to pick up objects. The gasoline engine was replaced with a pair of heavy electric motors in an oil-filled compartment. Sonar was installed, and a powerful light and four television cameras for sea-floor surveillance from a portable shore station (actually a bus). Power for RUM and sensor signals were provided by way of a coaxial cable 8,000 meters long. Early tests in shallow water were only moderately successful, and RUM was set aside for other projects. Source: here.

Selection of 15 images of RUM from University of Southern California. Libraries.
Title: Remote underwater manipulation test (United States Navy), 1960-05-16.
Description: Remote underwater manipulation test (United States Navy). May 16 1960. Howard Humphrey; Howard McQueen; Doctor Victor Anderson (project director); Bill Clay.; Caption slip reads: "Photographer: Snow. Date: 1960-05-16. Reporter: Henley. Assignment: RUM. Series of pictures of RUM going out to sea until it is completely submerged. Arm of RUM in sand after it broke down. Howard Humphrey and Howard McQueen, with hat, putting on arm in control van. Dr. Victor Anderson, project director; Bill Clay, closest to camera. Dr. Victor Anderson standing beside RUM on beach".
Photographer: Snow





Selected images of RUM from Time-Life Collection. Photographer is Ralph Crane. 1960.

Dr. Victor Anderson.



RUM II
ORB and RUM are a pair of MPL vehicles that often work as a team. By December 1967, ORB (Ocean Research Buoy) had been developed as a platform for suspending equipment and particularly as a service vehicle for RUM. ORB is a barge 45 feet by 65 feet with a large center well through which the ten-ton RUM is operated by means of a constant-tension winch. It has two laboratories, a galley and messhall, and sleeping quarters for twelve people. “Loading RUM is a somewhat unconventional operation,” its designers wrote. “RUM is first lowered to the bottom of the bay by a crane. Then ORB is moved to a position over RUM, divers attach the strain cable, and RUM is lifted up through the well doors.” Unconventional or not, it does work. RUM has been used for taking cores at depths down to 1,900 meters, for measurements of sediment properties in place, for underwater photography, for recovering equipment at depths down to 1,260 meters, and for sampling deep-sea biological communities. It has the advantage of being able to stay on the sea floor at work much longer than manned submersibles. On one of its earliest sea trials, in 1970, RUM placed two small sonar reflectors on the sea floor, crawled away from them, and returned to find and retrieve them. It also found a third sea-floor object: … a can of a well-known brand of stewed tomatoes. … The can was found to be the dwelling of a small and very frightened octopus. We feel [said RUM’s inventors] that this is one of the first times that a mobile biological specimen has been selectively retrieved by a remotely controlled manipulator as well as record of the first sea-going anti-pollution effort by such a unit.
See 25:55 into clip.
Anderson also developed the Benthic Laboratory, first used as a communications center for Sealab II in 1965. The laboratory housed electronic equipment. Source: here.

RUM (Remote Underwater Manipulator) – This series of seafloor work vehicles included RUM II, a remotely controlled, tracked vehicle which was developed under the sponsorship of the Office of Naval Research at the Marine Physical Laboratory for use as a research tool in sea floor technology experiments, and to establish design criteria for future sea floor technology systems. RUM III, which combines seafloor search and work capabilities, is in the development phase.
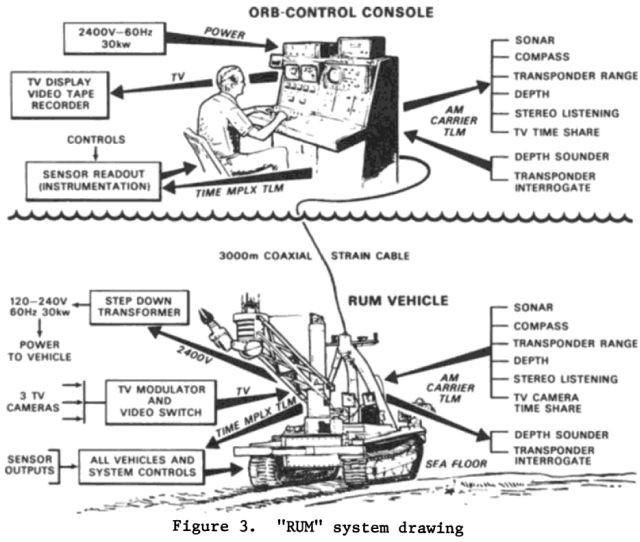
RUM II provided detailed information on vehicle trafficability, remote manipulation, navigation, cable telemetry systems, effect of ambient pressure on electronics, and environmental and mechanical design considerations. Design depth for the vehicle is 2,400 meters. Extensive operations have been carried out in a variety of locations of diverse bottom characteristics within 120 km radius from San Diego. Depth of operations has ranged from 30 to 1800 meters. Operational tasks carried out on the sea floor have included search and recovery, implantment of instruments, biological studies, vehicle trafficability studies, navigation exercises, collection of samples, and the measurement of the engineering properties of sea floor sediments. During operations, RUM was launched through the well on ORB and lowered to the sea floor. A pair of divers were used in the launch and recovery of the vehicle to connect and disconnect snubbing cables. Electrical power, telemetry for control and instrumentation, and signals for sonar, navigation aids and television were transmitted over the single coaxial umbilical cable connecting the RUM to ORB.
The vehicle was propelled by two independently controlled reversible 15.6 KW direct current motors, one driving each track. Other equipment included three television cameras, ten 500-watt quartz iodide lights, two 600-watt mercury vapor lights, color movie and still cameras, an obstacle avoidance scanning sonar with a 25-meter range, a high resolution search sonar with a 200-meter range, up- and down-looking depth sounders, a magnetic compass, listening hydrophones, acoustic transponder navigation system and a manipulator capable of exerting 22 kg of force in any direction.
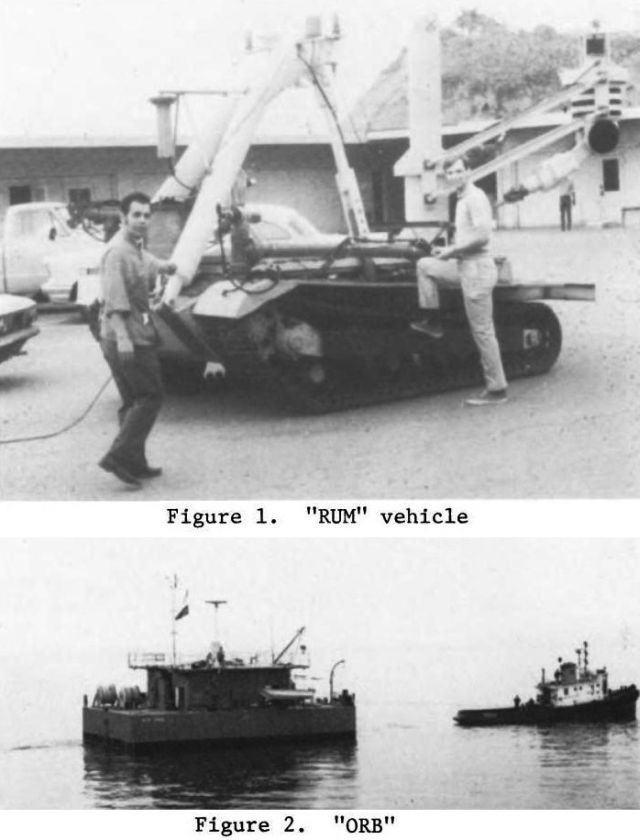

ORB (Oceanographic Research Buoy) – ORB, a 21 x 14 meter rectangular shaped vessel displacing approximately 330 tons, was developed by the Marine Physical Laboratory to serve projects at the laboratory which require the launch, retrieval, implantation or handling of large equipment or systems in the open ocean. In contrast to FLIP, ORB is designed to follow the sea surface as closely as possible, in order to simplify the task of placing and retrieving large objects in the ocean. The vessel has a center well of 9- by 6-meter area which can be opened to permit the lowering of equipment through it, using a cable-tensioning system to minimize vertical motions. The well doors when closed provide a dry work space and will safely support a weight of 12,000 kg. Loads up to 12 tons can be lowered to a maximum depth of 2,000 meters. ORB is 8 meters high from keel to upper deck. It has no means of self propulsion and must be towed to and from operating areas. In addition to laboratory work spaces and machinery space, ORB is equipped with complete living facilities for 20 people including five crew members.
ORB, during her first ten years of operation in support of over a dozen different projects, has been moored at over 20 sites ranging up to 400 km off the southern California coast and at depths from 30 to over 4,000 meters.
There is a RUM III but I have no image of it.
CABLE WINDING MECHANISM
Publication number US3168261
Publication date 2 Feb 1965
Filing date 29 Mar 1963
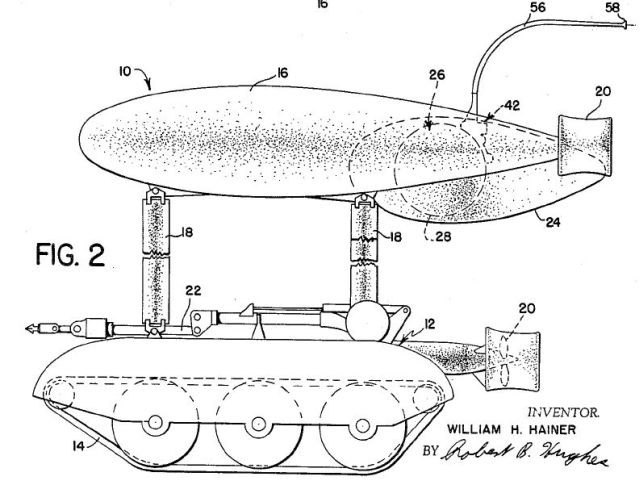
Inventor: William H. Hainer
Original Assignee General Mills Inc
This invention relates to a cable winding mechanism, and more particularly to an apparatus for use on a remotely controlled vehicle, such as an underwater reconnaissance vehicle, to automatically reel in or pay out a control or power cable for the vehicle as it travels a course.
It is a general object of the present invention to provide such a cable winding mechanism which is relatively simple and compact, which performs reliably, which, when reeling cable in, properly winds the cable in even multiple layers upon a spool or drum, and, when paying out cable, properly dispenses the cable from said drum, and which, in reeling in and paying out cable, does so independently of the travel of the vehicle, by making the winding action of the drum responsive to tension on the cable.
In conjunction with this above-mentioned object is the further object of providing such a cable winding mechanism especially adapted for use in a remotely controlled underwater reconnaissance vehicle that is designed to travel over rough terrain of the ocean floor at relatively great depths (i.e. 500 feet or more) and be able to follow a relatively complex course over such terrain.
It is believed a clearer understanding of the apparatus to which the present invention relates, and of the problems which the invention purports to alleviate will be obtained by first describing briefly an underwater vehicle of the type for which the present invention is especially adapted and the problems in its operation.
Such a vehicle has a chassis which rests on a pair of tracks by which the vehicle is able to propel itself along the ocean floor. Pivotally connected to the chassis are a set of upstanding struts the upper ends :of which are pivotally connected to a set of tanks which impart a lifting or buoying force to the vehicle. By properly moving these tanks by means of the supporting struts, the vehicles center of buoyancy is placed over its center of gravity, and the entire vehicle is better able to be stabilized [on its tracks so that it can travel over steeply sloped surfaces. Also, both the chassis and the tanks are provided with propellers to power the vehicle above the ocean floor, submarine fashion, in the event that it is desired to pass over a crevasse or other obstacle.
The vehicle is both controlled and powered electrically, this being accomplished by an electric cable leading from the vehicle to a suitable power and control source, such as a surface ship or possibly a shore station. While the vehicle, during a reconnaissance mission, may be following a maze-like course over the ocean floor, the cable will sometimes slide sideways over the ocean floor or become snagged on obstructions or vegetation. Since the cable has a total length of perhaps five miles, it may become strung out over the ocean floor along a rather unpredictable and complex path, quite different from that which the vehicle has travelled. Thus, there arise particular problems in reeling in the cable under these conditions, among such problems being that of guarding against the vehicle itself cutting across and severing the cable. it is for effective operations under conditions such as these that my invention purports to provide a practical cable winding apparatus.
The General Mills Model 150 Manipulator Arm
The General Mills' Model 150 Manipulator. See also General Mills technology described here.

Harold "Bud" Froehlich
The dream of building a manned deep ocean research submersible first started to move toward reality on February 29, 1956. Allyn Vine of Woods Hole Oceanographic Institution (WHOI) attended a symposium in Washington, where participants drafted a resolution that the U.S. develop a national program for manned undersea vehicles. From this beginning the community eventually obtained the Trieste bathyscaphe, but it was quite large and not very maneuverable – a better craft was needed.
In 1960, Charles Momsen, head of the Office of Naval Research (ONR), petitioned for scientists to rent a submersible with ONR funds, and found WHOI investigators interested. In the spring of 1962, after unsuccessful negotiations with various submersible builders to rent a sub, Vine and others at Woods Hole went and requested bids to buy a small submersible based on drawings made by Bud Froehlich for a vehicle he called the Seapup. General Mills won the bid for $472,517 for an unnamed 6,000-foot submersible. Source: here.
See other early Underwater Robots here.