Publication number US2987893
Publication date Jun 13, 1961
Filing date Oct 29, 1956
Inventor: Jack D. Robinson Jr.
Original Assignee: American Machine & Foundry
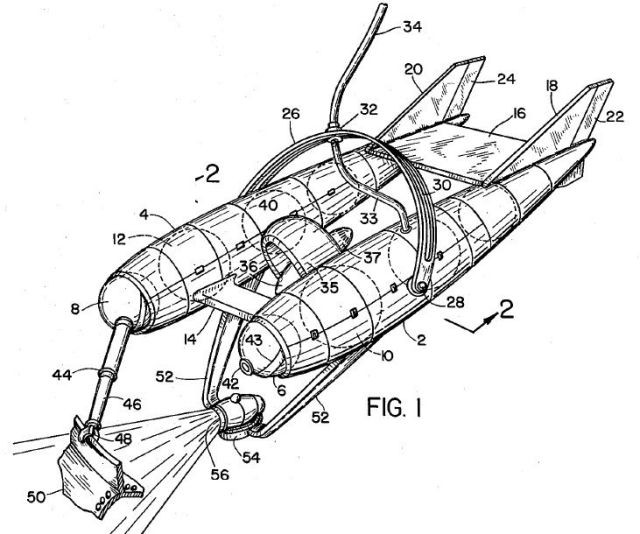
UNDERWATER CRAFT.
Jack. D. Robinson, Jr., Norwalk, Conn., assignor to American Machine & Foundry Company, a corporation of New Jersey Filed Oct. 29, 1956.
This invention relates to mobile underwater craft and is more particularly concerned with underwater manipulating and televiewing apparatus which may be remotely operated and controlled by electrical impulses transmitted through a cable connecting the underwater craft with a remote control station.
Underwater craft when remotely controlled by way of a cable, whether towed or propelled, have hitherto suffered from insufficient stability in maintaining constant depth and in establishing and maintaining a desired course. These craft also were objectionably limited in speed and maneuverability due to excessive drag caused by unwieldy construction. They were unable to perform even simple work such as picking up objects and manipulating articles under water.
Furthermore, failure to establish coincidence in one plane, of the centers of drag, thrust and cable tension, and of providing a stablizing buoyancy-gravity coupled about this plane, caused control of the movements of these underwater craft to be cumbersome and unstable.
It is accordingly an object of the present invention to overcome the above mentioned difficulties by providing a remotely controlled underwater vehicle which by virtue of the bodily shape thereof, and the method of propulsion and control permits accurate movements or hovering within the area of underwater operation.
Another object of the invention is to provide in a remotely controlled underwater vehicle, means for maintaining constant depth, and means for establishing; and maintaining a desired course or heading.
An additional object of the invention is to provide. a remotely controlled underwater vehicle which is inherently stable by virtue of having established in;the-design thereof coincidence in one plane of the centers of drag, thrust and cable tension, and of a stabilizing buoyancy-gravity coupled about this plane.
A further object of the invention is to provide a remotely controlled underwater-craft having a propulsion unit, the angle of thrust with the horizontal plane is adjustable so as to provide components of thrust to overcome drag, buoyancy and cable tension.
A still further object of the invention is to provide a remotely controlled underwater vehicle including spherical pressure vessels which, serve not only as enclosures for television apparatus, manipulating arm mechanism, instruments and circuit elements etc., but also serve as efficient buoyancy elements.
It is another object of the invention to provide a remotely controlled underwater craft having two fuselages comprising free flooding fairing of aircraft type construction, enclosing spherical pressure vessels, a manipulating arm mounted at the front end of one of the fuselages and a viewing camera mounted in the front end of the other fuselage.
Still another object of the invention is to provide means for improving the stability of remotely controlled underwater craft by reducing overturning forces acting on the underwater television and manipulating vehicle, caused by tension exerted through a control cable.
A further object of the invention is to provide a remotely controlled underwater television system and manipulating mechanism which will be protected against water seepage particularly at great depths.
Still another object of the invention is to provide an underwater viewing and manipulating apparatus which can be accurately and easily operated and controlled from a remote station.
See other early Underwater Robots here.