
1933 – Submarine Salvage Apparatus by Eugene J. Romano.
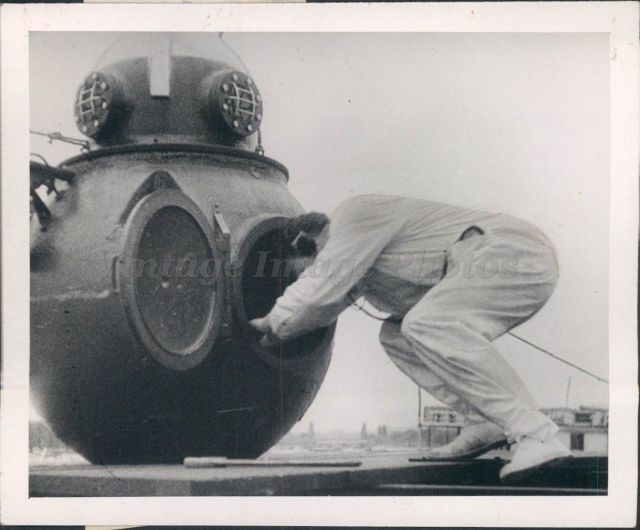
For a demonstration of the robot to be used on this expedition, Lieutenant Harry E. rieseberg tackles the device in true diver's fashion. There is no dignity in entering or leaving the robot.
Harry E. Rieseberg
Extract from HE WALKS WITH DAVEY JONES by Eric Strutt
Source: The Lincoln Star, 28 December, 1941
WHILE Lieutenant Rieseberg had been off adventuring, Eugene Romano, an inventor living in Seattle, Wash., had been perfecting a steel diving robot capable of withstanding ocean pressure to a depth of 5000 feet. Two toggle-jointed, electrically operated arms extend from the upper half of the robot, terminating in pincer-like claws delicate enough to pick up a single coin, yet strong enough to exert a pressure of 5000 pounds, and flexible enough to tie a knot in a cable.
Lieutenant Rieseberg received permission to test this Romano robot; and with Captain Loesche as sailing master of the magnificent four-masted schooner Constellation he set out for Manta Bay, Peru, where he hoped to find the wreck of the Santa Cruz, a victim of treacherous reefs during the 17th century. The ancient manuscript that told of the wreck stated there was a curse on the treasure.
A MAN can't let century-old curses a interfere with his business. Arriving at Manta Bay, Rieseberg explored the ocean floor in the goggle-eyed robot until he found the ship.
A few yards away, in an observation bell, "Spik" Gomez, an assistant, was taking pictures of the diving bell in action. Suddenly out of a dark sea ravine a huge octopus slid between the divers and wrapped its tremendous tentacles around the observation bell, shaking it with' such force that Gomez was knocked unconscious.
Lieutenant Rieseberg set his movie camera going and moved in to the rescue. Using the robot's powerful pincer claws, he hacked at the encircling arms of the Manta Bay monster until he had killed it.
A little later Rieseberg and another diver went down below in regular suits to take pictures and measurements of the great octopus. It measured 24 feet from tip to tip—the largest octopus ever filmed.
The next time Rieseberg submerged he uncovered a crude iron chest that yielded up 400.000 corroded and blackened discs of metal, later valued at approximately $40,000.
A FEW minor, and usually successful, cruises served as a prelude to another try for the Silver Shoals treasure which had now become ale most an obsession with Rieseberg.
He made a number of exploratory descents in the Romano robot at Silver Shoals until he located an ancient galleon which appeared to be one of the fabulous fleet he sought.
The following day, in the face of an approaching storm, he went over the side. He reached the wreck, which was perched on a rocky outcrop about 50 fathoms deep. He started working around the hulk, when a violent rocking motion of the robot sent it rolling over the rock shelf and straight down.
"I shouted through the telephone, but I got no answer," Rieseberg told me. "Finally the robot came to an abrupt halt, and Captain Loesche's voice came through the headphones. A gale had struck the ship and the cable controlling the robot had slipped sending me down 234 fathoms—deeper than anyone had ever gone in a workable robot before.
Note: RH 2015 – Riesenberg is known to have stretched that facts at lot to make an interesting story. The octopus mentioned above was later revealed to be a prop to the movie he was making at the time.
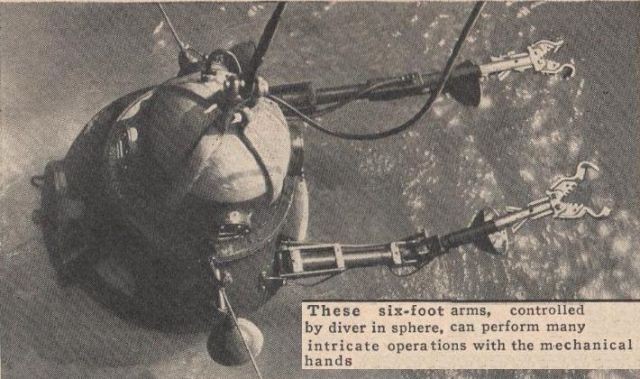
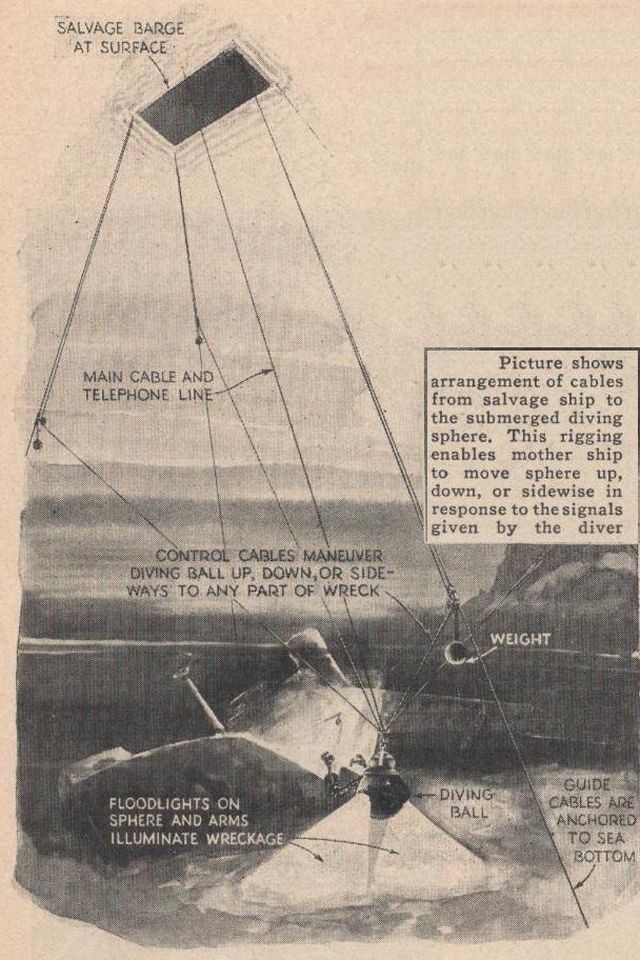
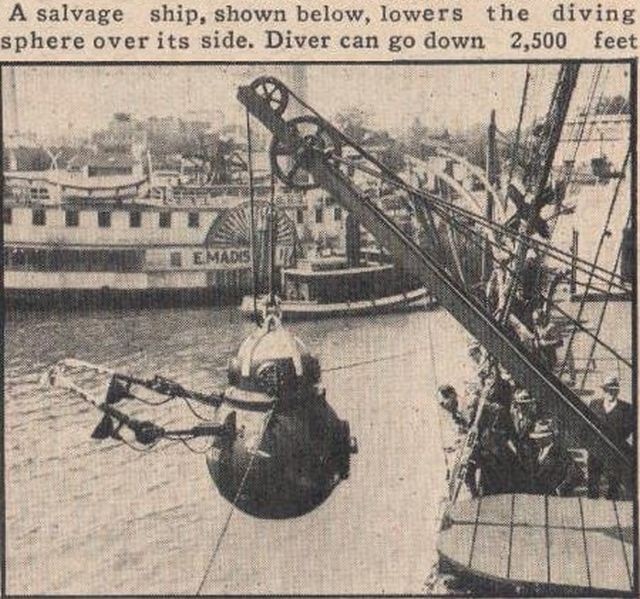
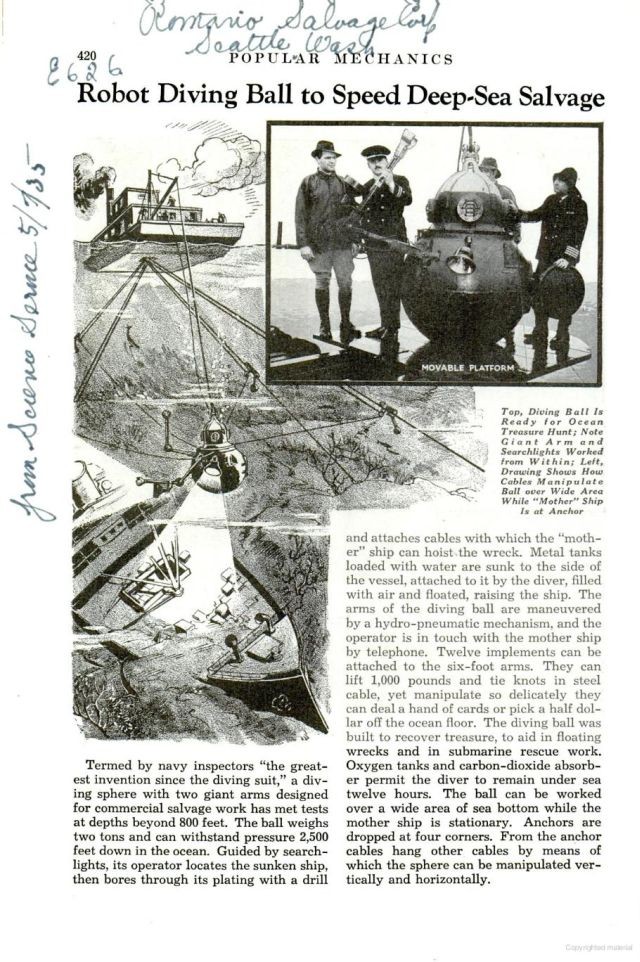
SOON to be used in a search for sunken treasure, a new salvaging system recently was demonstrated at Washington, D. C. When a sunken vessel holding bullion is located, four cables anchor the salvage ship. Auxiliary cables then lower a one-man diving sphere and move it to any part of the wreck. The diver attaches salvage buoys or pontoons to the vessel, which is ultimately raised to the surface by pumping air into the buoys. Oxygen and air-purifying apparatus within the sphere enables the diver to stay submerged for sixteen hours. The steel ball is strong enough to withstand sea pressure at a 2,500-foot depth, and has movable six-foot arms to which twelve different implements may be attached and manipulated with amazing dexterity. With them, the diver can lift half-ton weights, tie knots in inch-and-a-half steel cable, and drill three-inch holes through ship plates. To demonstrate still more convincingly the maneuverability of the arms, a skilled operator recently performed the stunt of playing bridge, readily picking up and laying down the cards with the versatile "hands."
Source: Popular Science, August 1935.
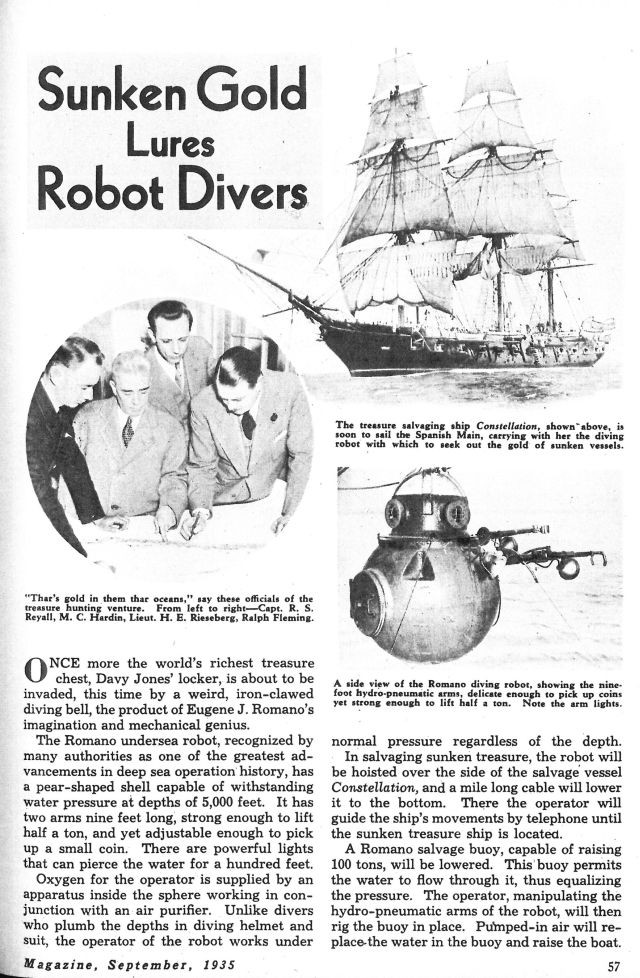
ONCE more the world's richest treasure chest, Davy Jones' locker, is about to be invaded, this time by a weird, iron-clawed diving bell, the product of Eugene J. Romano's imagination and mechanical genius.
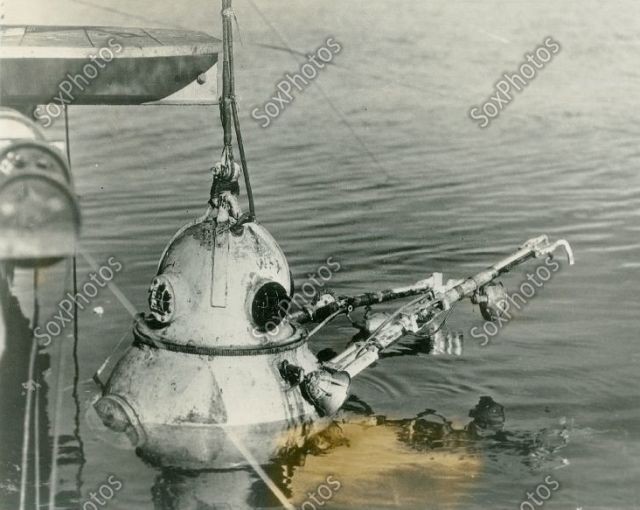
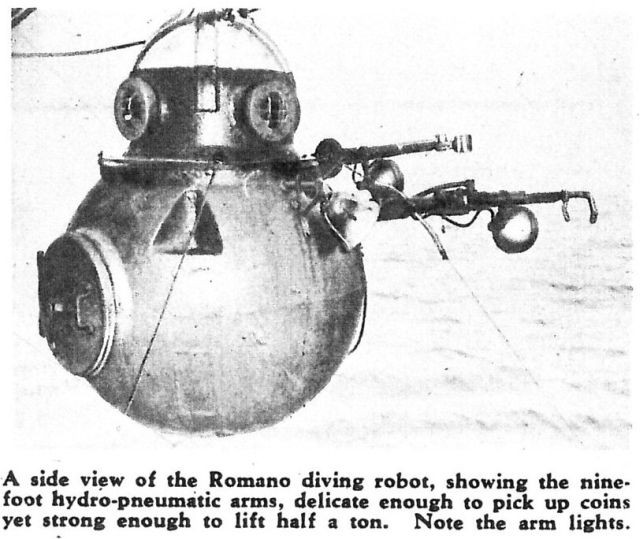
The Romano undersea robot, recognized by many authorities as one of the greatest advancements in deep sea operation history, has a pear-shaped shell capable of withstanding water pressure at depths of 5,000 feet. It has two arms nine feet long, strong enough to lift half a ton, and yet adjustable enough to pick up a small coin. There are powerful lights that can pierce the water for a hundred feet.
Oxygen for the operator is supplied by an apparatus inside the sphere working in conjunction with an air purifier. Unlike divers who plumb the depths in diving helmet and suit, the operator of the robot works under normal pressure regardless of the depth.
In salvaging sunken treasure, the robot will be hoisted over the side of the salvage vessel Constellation, and a mile long cable will lower it to the bottom. There the operator will guide the ship's movements by telephone until the sunken treasure ship is located.
A Romano salvage buoy, capable of raising 100 tons, will be lowered. This buoy permits the water to flow through it, thus equalizing the pressure. The operator, manipulating the hydro-pneumatic arms of the robot, will then rig the buoy in place. Pumped-in air will replace the water in the buoy and raise the boat.
Source: Mechanix Illustrated Magazine, September, 1935
Romano's Patents:
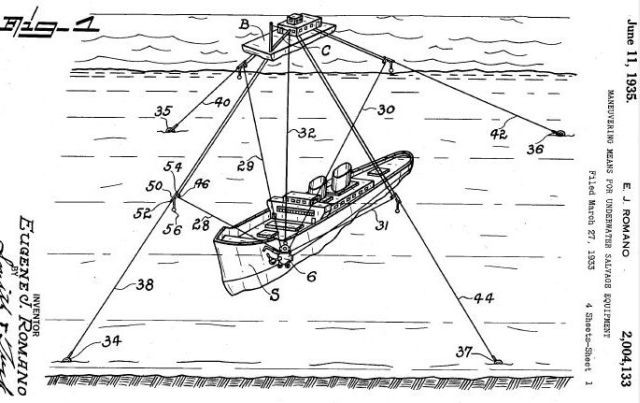
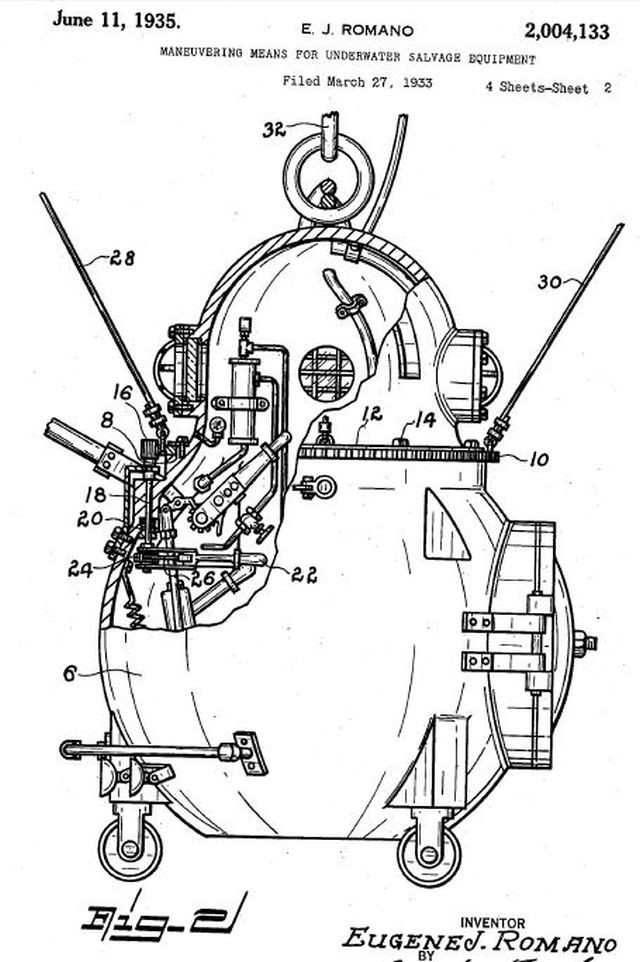
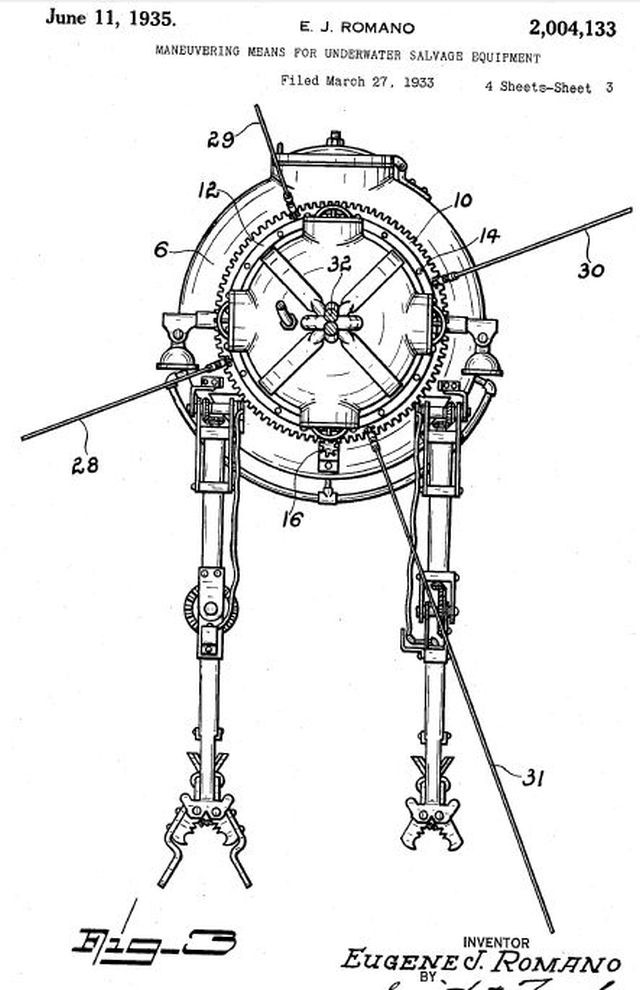
Maneuvering means for underwater salvage equipment
Publication number US2004133 A
Publication type Grant
Publication date Jun 11, 1935
Filing date Mar 27, 1933
Priority date Mar 27, 1933
Inventors Romano Eugene J
Original Assignee Romano Eugene J
Claims.
My present invention relates to the art of marine salvage equipment and more particularly to maneuvering means for under water salvage equipment.
The principal object of my present invention is the provision of maneuvering means which permit the exact placement of a diving bell even though it may be far beneath the surface of the water.
A further object of my invention is to provide means whereby, after the bell has been placed in its desired position, it may be revolved so that any arms or ports may face in the most desired direction.
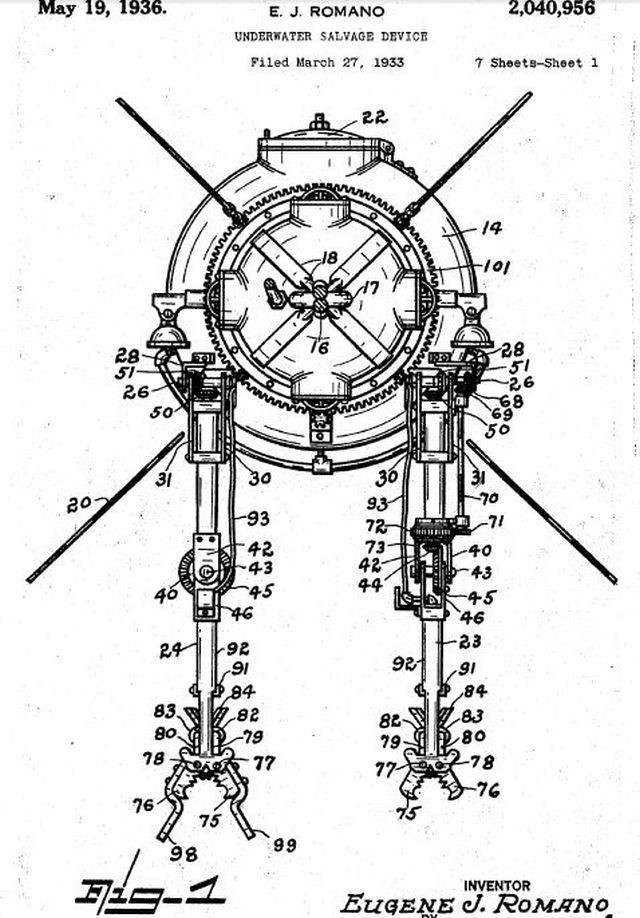
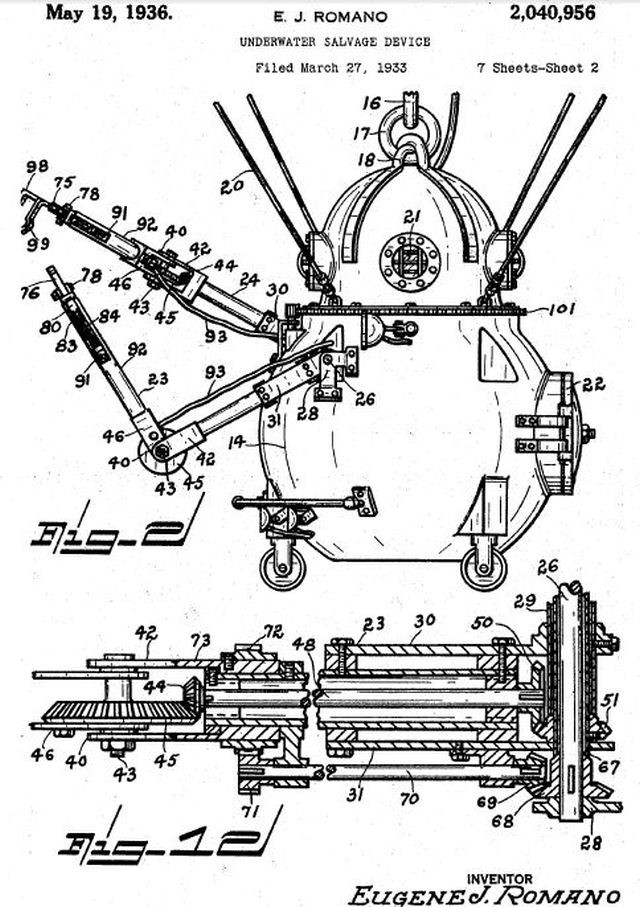
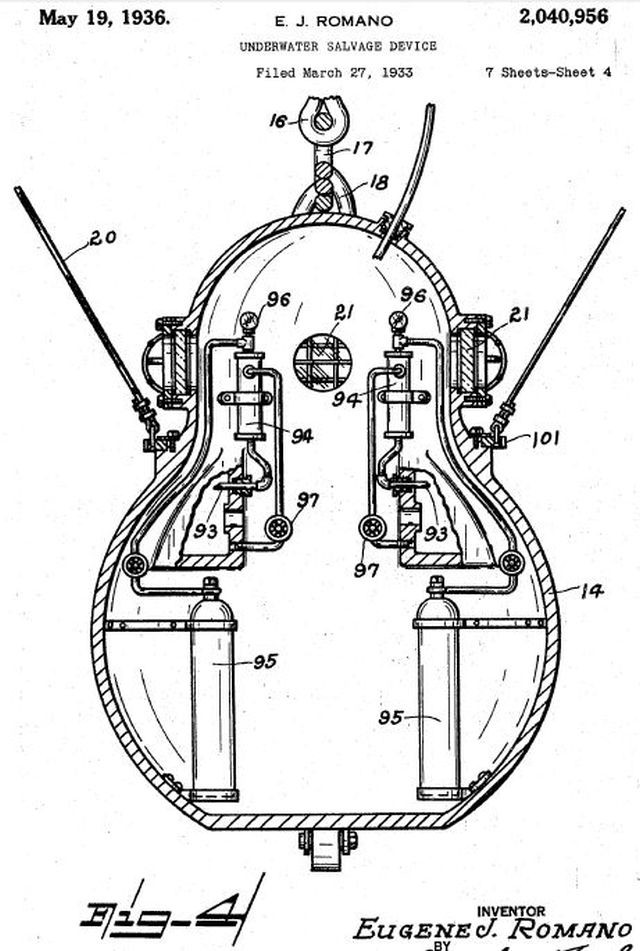
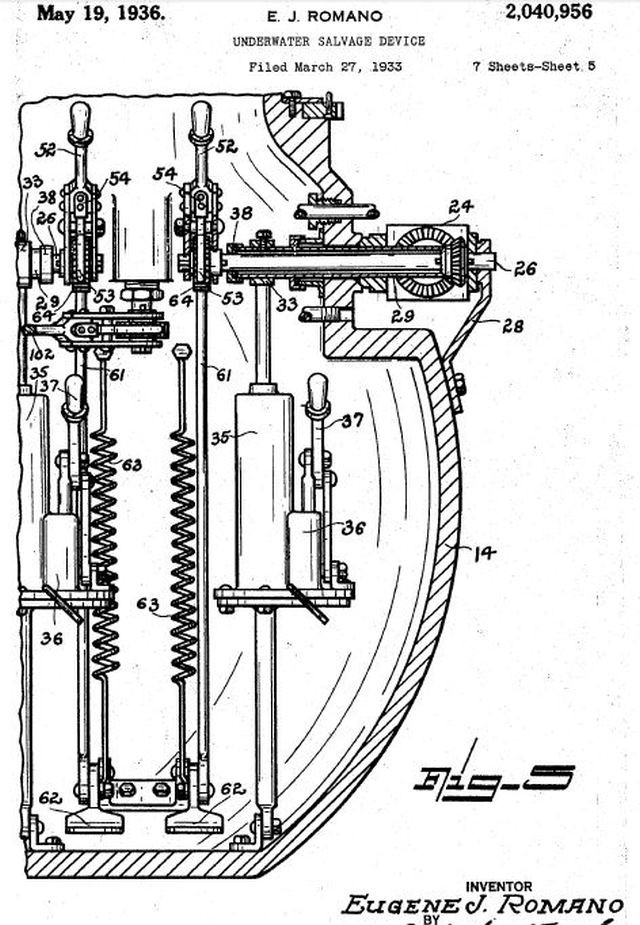
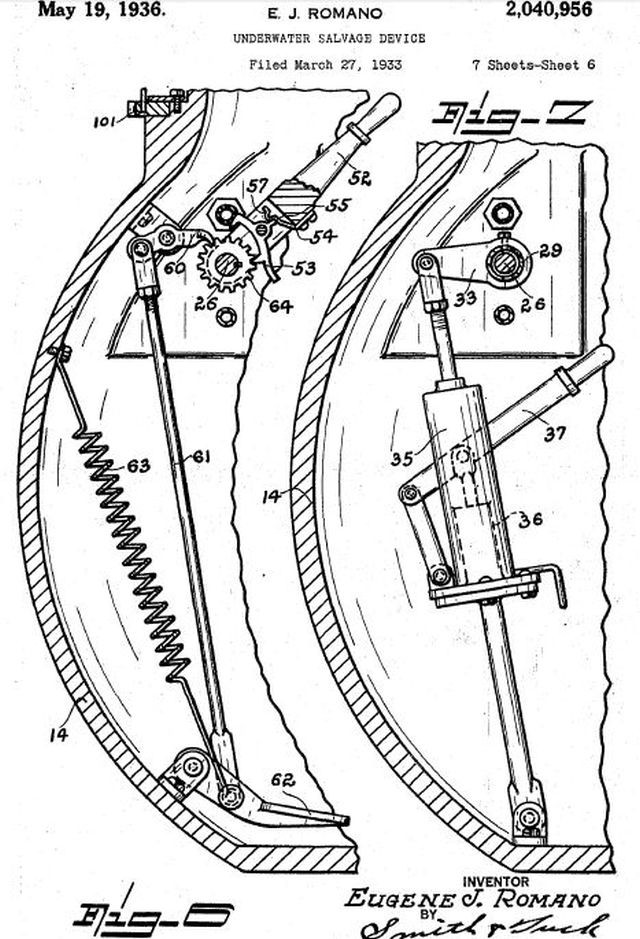
Underwater salvage device
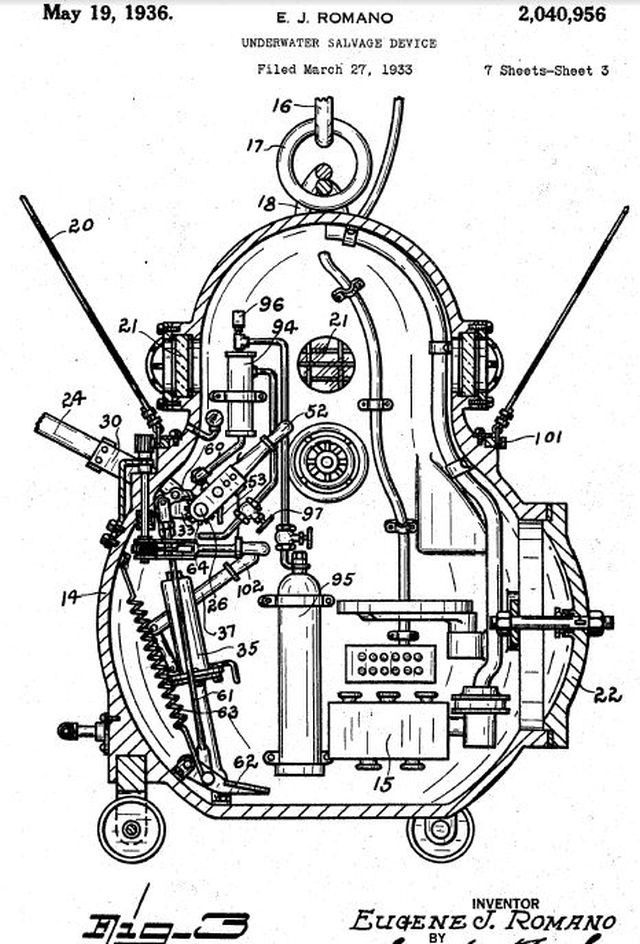
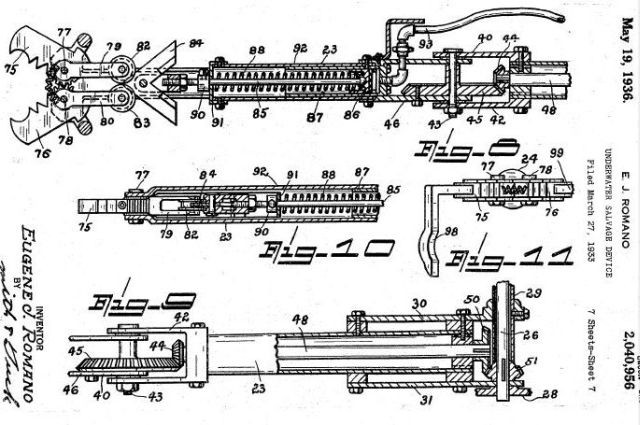
Publication number US2040956 A
Publication type Grant
Publication date May 19, 1936
Filing date Mar 27, 1933
Priority date Mar 27, 1933
Inventors Lula Romano
Original Assignee Lula Romano
My present invention relates to the art of underwater salvaging and more particularly to an underwater salvage device.
The great wealth represented in sunken boats and the like in the ocean, at greater depths than the ordinary diver can descend, has prompted the development of many devices to aid in underwater salvage. My device is of this general class. It is characterized however by being so arranged in that an operator can descend hundreds of feet below the surface of the water and by means of control arrangements manipulate two or more arms in a manner which makes it possible to execute any maneuver that could normally be done by the two arms of an individual. The method of supporting and maneuvering my salvage device has been gone into in some detail in my co-pending application entitled "Maneuvering means for underwater salvage equipment 20 Serial Number 663,030 filed March 27, 1933 has all the characteristics of the various diving bells which have been designed and constructed to permit an observer descending to great depths to assist in directing salvage operations, and in addition is provided with the mechanical arms which because of their unusual construction have proven to be of great value.
The principal object of my present invention is therefore to provide means in addition to a diving arrangement whereby salvage operations can actually be conducted by the observer.
A further object is the provision of means whereby the mechanical arms of my diving device can be operated in the same manner as the arms of an individual.
A further object is the provision of means whereby the power applied to the arms of my device can be so increased that the device can be used to handle the heavy cables and chains, lift heavy objects and the like which marine salvage requires.
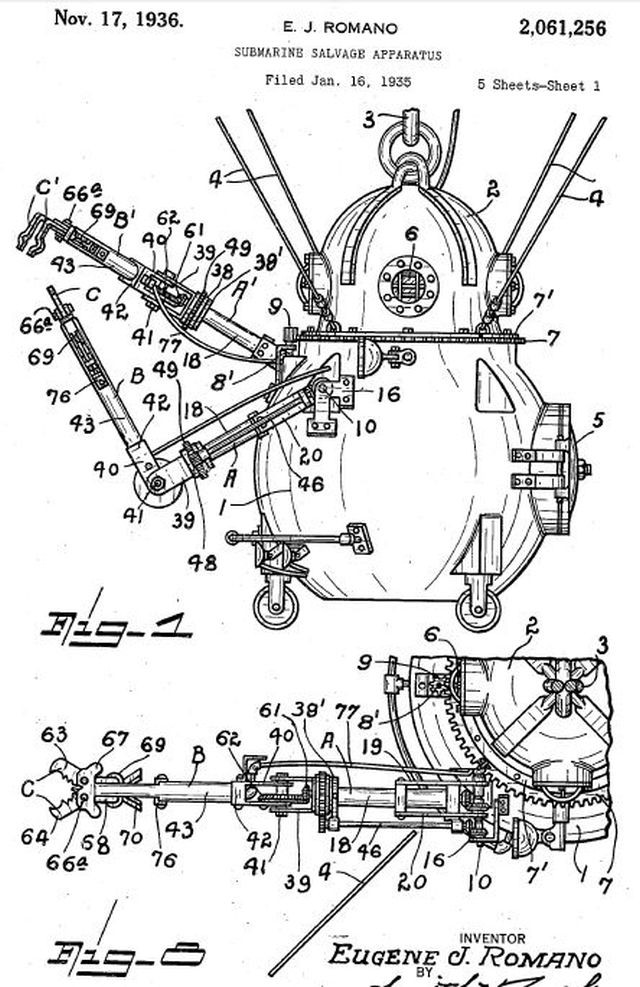
Submarine salvage apparatus
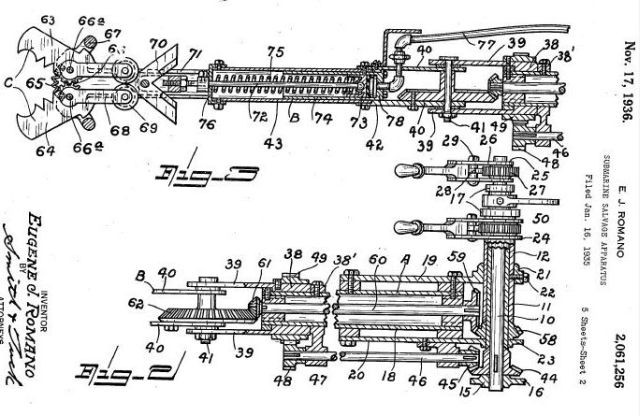
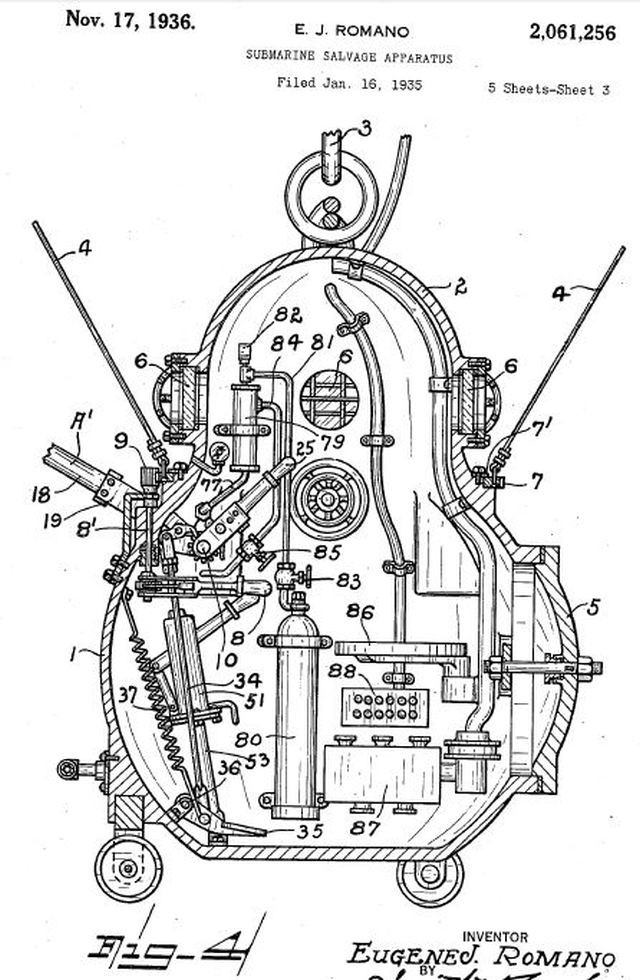
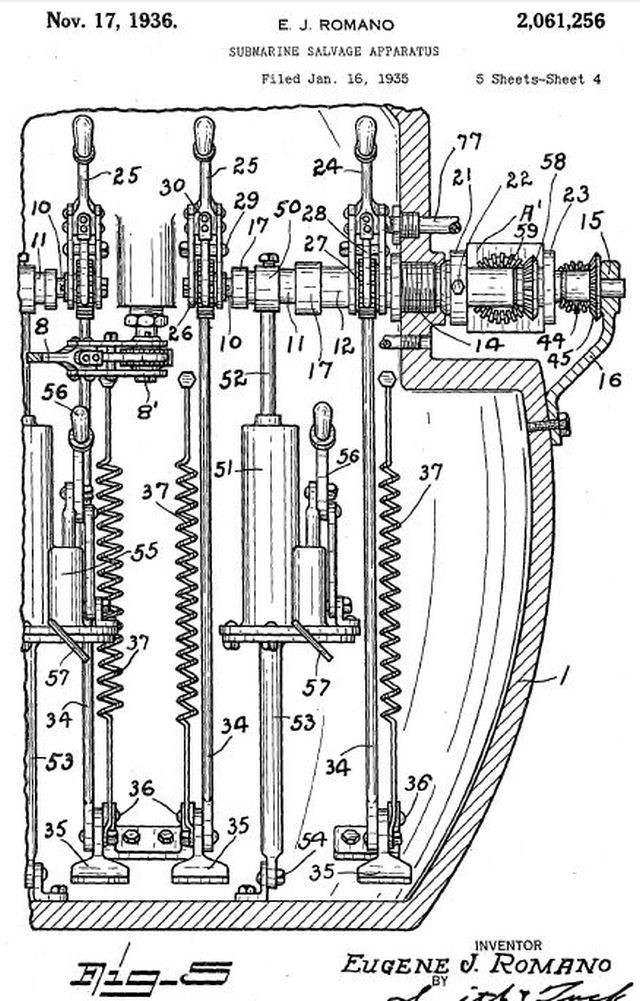
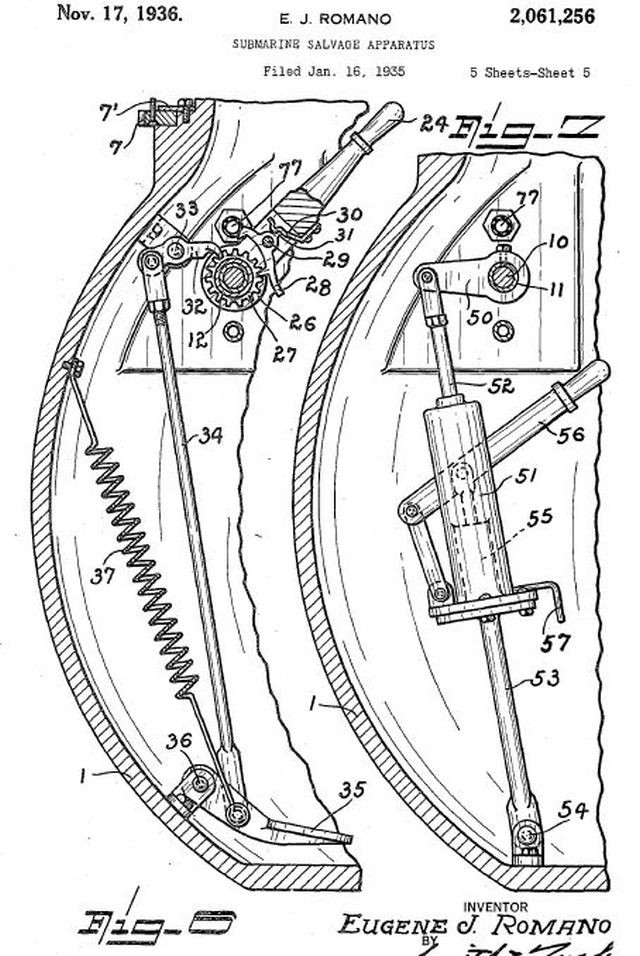
Publication number US2061256 A
Publication type Grant
Publication date Nov 17, 1936
Filing date Jan 16, 1935
Priority date Jan 16, 1935
Inventors Romano Eugene J
Original Assignee Romano Eugene J
My present invention relates to improvements in submarine salvaging apparatus and particularly to the operating mechanism and control means of the duplex grappling arms forming part of the apparatus or equipment. The submarine equipment includes a diving bell in which the operator is stationed, and by the utilization of the operating mechanism and control devices of my invention the exterior, flexible, grappling arms are manipulated from the interior of the shell or diving bell, in order to swing the two arms in parallel planes with relation to the bell; to flex the arms; and to revolve one section of each of the flexible arms on its longitudinal axis. A pair of grappling jaws are mounted at the free ends of each of the grappling arms, and operating means for these jaws are also controlled from the interior of the diving bell by the operator.
By the employment of both his hands and feet, the operator is enabled to manipulate the two grappling devices and co-ordinate their functions in such facile manner as to assure eflicient and rapid movements in salvaging operations while under water. ….
Interesting that the current field of aerial camera systems, including CableCam® and Spidercam®, amongst others, use the same basic technique that Romano patented back in 1933.
The patent for Cablecam: System and method for moving objects within three-dimensional space
Publication number US6809495 B2
Publication date Oct 26, 2004
Filing date Jul 28, 2003
Inventor Jim Rodnunsky
Neslé chocolate sticker card from Belgium.
See other early Underwater Robots here.
Check out the new website. I’d love to hear from anyone interested in Rieseberg or Romano.
I am writing a biography about Harry Rieseberg and would love to hear from anyone with interest.