1920 – Submarine Salvage Vessel by John C. Setlow
Submarine salvage vessel
Publication number US1450232 A
Publication type Grant
Publication date Apr 3, 1923
Filing date Mar 6, 1920
Priority date Mar 6, 1920
Inventors Setlow John C
Original Assignee Setlow John C
Description
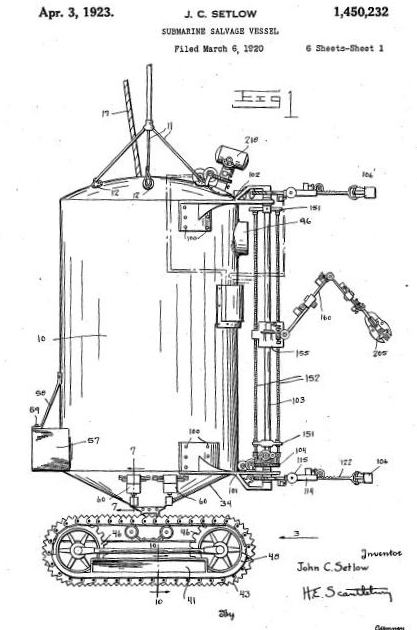
In the usual type of submarine salvage vessels, the salvage or wrecking tools are mounted on the exterior of the vessel and are operated from the interior of the vessel. It has therefore been necessary to lead the operating shafts, rods or similar mechanisms for driving and controlling the tools, through stuffing boxes, ball and socket joints or the like provided in the shell of the vessel. Consequently the depth to which salvage vessels have been operated has been limited to comparatively shallow water since the pressure of the water at great depths is sufficient to cause leakage at any point where a working joint is provided between the interior and exterior of the shell regardless of packing measures which may be taken to prevent such leakage.
Therefore it is one of the objects of my invention to increase the working depth of salvage vessels by dispensing with working joints in the side of such vessels by the positioning of electric motors, constituting the operating or driving means for the salvage tools, on the outside of the vessel, and by the positioning of the controlling means consisting of switches, within the vessels. Said controlling means and operating means are connected by electricity conductors, mainly in the form of wires, said conductors at point of entry into the vessel being of novel construction which will preclude the leakage of water into the vessel at this point.
It is a further object of the invention to provide a salvage vessel wherein the salvage tools are of such a character as will enable the operator to perform comparatively intricate tasks with comparative ease. …..
See other early Underwater Robots here.