1916 – Machine for Submarine Salvage Operations by Alexander J. Bergeron
MACHINE FOR SUBMARINE SALVAGE OPERATIONS
Publication number US1304012 A
Publication type Grant
Publication date May 20, 1919
Filing date May 11, 1916
Inventors Alexander J. Bergeron
Description
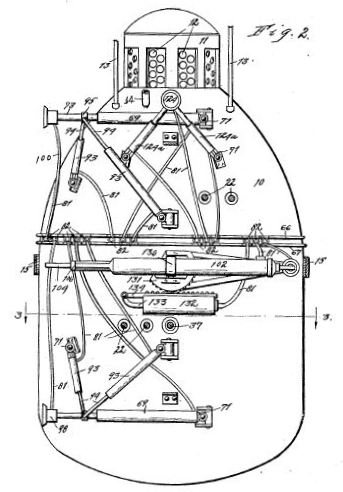
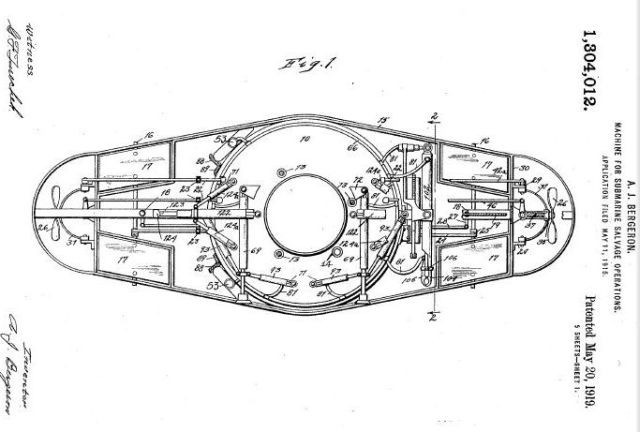
The object of my invention is to provide a machine for sub-marine salvage operations, adapted at all times to be connected with boats or the like on the surface of the water, and to carry one or more operators below the water…….
A further object is to provide such a device having means outside the shell controllable from within for illuminating any part of the water around the shell.
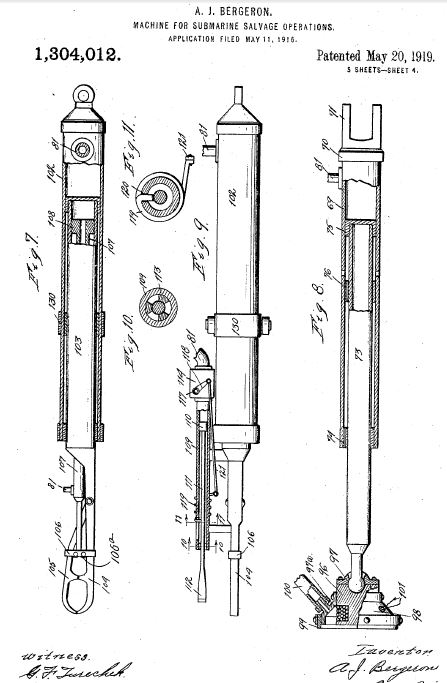
A further object is to provide in such a machine, a plurality of tools operatively connected with the shell, controllable from within the shell, and adapted to be moved to a variety of positions and to perform a variety of operations, such as striking, pulling, pushing, gripping and so on.
A further object is to provide means, controllable from within the shell, for supplying power to and operating said tools for working them, said means including a cylinder and pistons therein, exposed to the water pressure on one side, a pair of pumps, means for alternately operatively connecting said pumps with said cylinder on the other side of said piston for alternately subjecting said piston to greater pressure and less pressure than the water pressure………..
See other early Underwater Robots here.