1906 – Apparatus for Submarine Recovering Operations Patent by Becchi and Tarantini.
Publication number US872888 A
Publication type Grant
Publication date Dec 3, 1907
Filing date Nov 15, 1906
Inventors Angelo Becchi, Giovanni Battista Tarantini
Original Assignee Angelo Becchi, Giovanni Battista Tarantini
APPARATUS FOR SUBMARINE RECOVERING OPERATIONS.
This invention has for its object to provide an apparatus for submarine recovering operations, for fishing of pearls, sponges, corals etc.
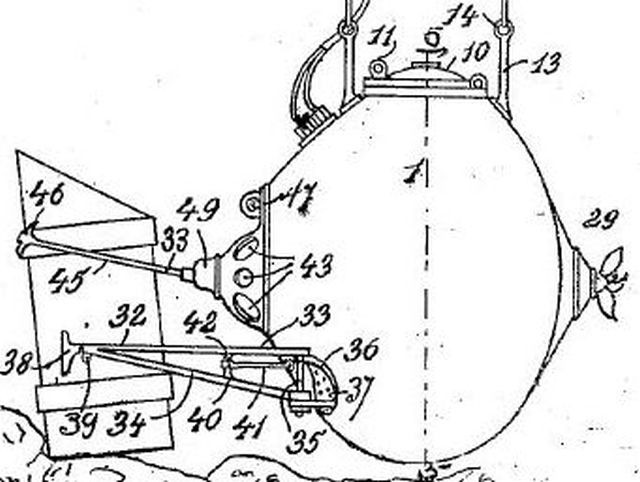
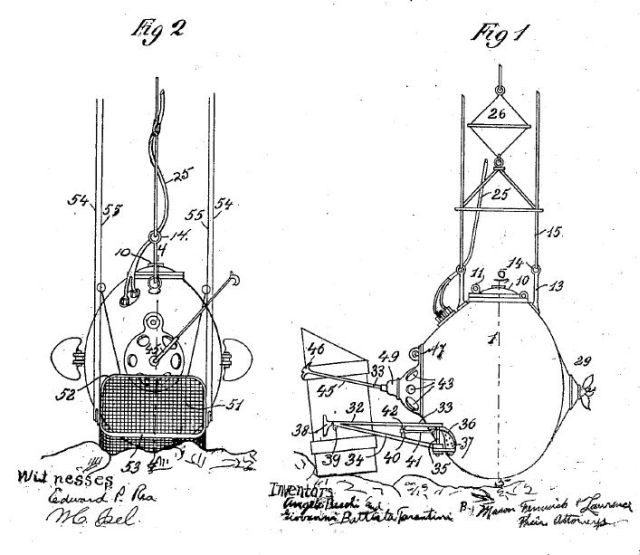
It consists of a submergible chamber movable forward and in every sense, as may be required for its operations. Said chamber is to be occupied by the operator and is internally furnished with all the necessary means for submarine inspections as well as for catching and holding the objects to be recovered or fished. These means are directed and managed by the operator on the inside of the chamber, but they act partially on the objects that are outside of it.
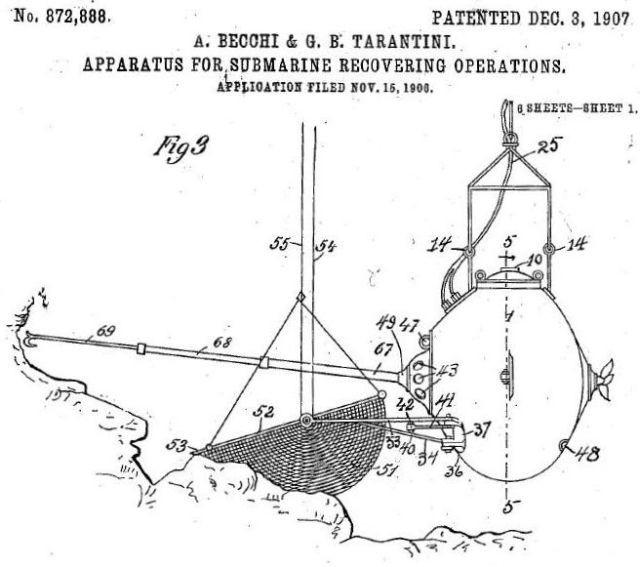
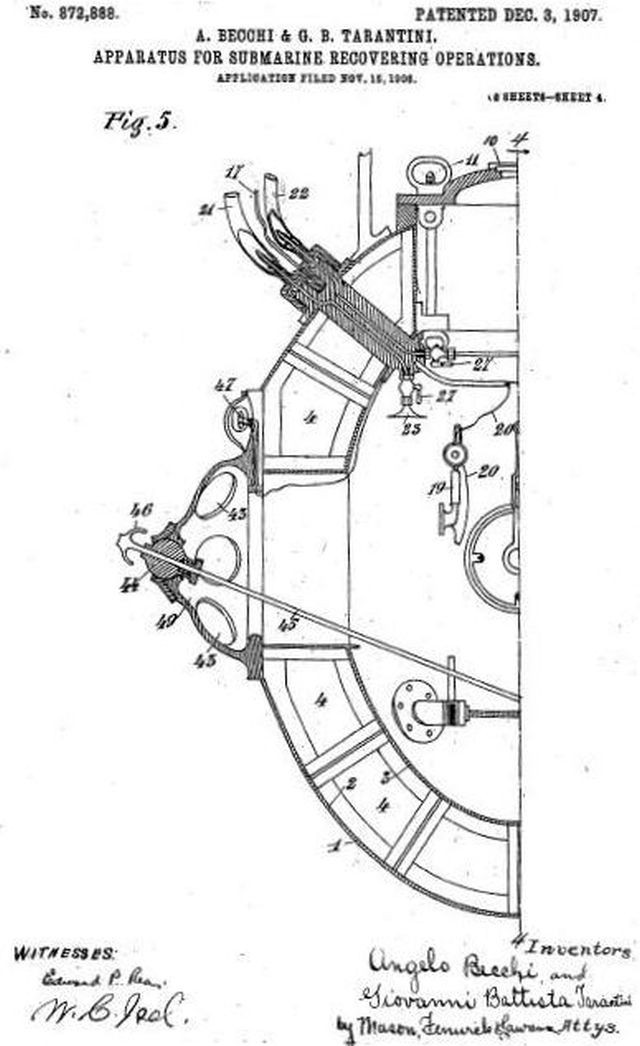
When the apparatus is to be employed for fishing sponges etc., the arm is substituted by another one shown in Figs. 8 and 9. This arm consists of two, three or four steel pipes telescoped into each other, the most internal one contains a bar of steel furnished at its end with a special shovel, that maybe changed according to the different kind of fishing that is to be done. Said arm is in constant communication with a pump by means of a flexible pipe 66 another pipe 65 serves to let the water out of the arm, after it has worked in it. A cock 70 will, according to its position, (1st) establish the communication between the water feeding pipe 66 and canal 57, or (2nd) connect pipe 66 with canal 56 and at the same time connect pipe 65 with canal 57 or else (3rd) close any connection between pipe 66 and the inside of the arm. When the water under pressure arrives through canal 57- it will push the pistons 59 68, with which the extremities of the telescoped steel pipes are provided and compel the pipes to slide out of each other, thus extending the arm forward, outside of the apparatus. When wishing to shorten this arm, the operator turns the cock 70 letting thus enter the water under pressure into canal 56, it will then flow through pipe 60 into the space 71 into canal 58 and from this pass through the hole 61 into the space 72. In the spaces 71 and 72 the water under pressure acting on. the opposed face of the pistons 59 and 68 will push them back and the water that is on the other side of the pistons will run from cylinder 67, and pipes 65 the connection with said pipe, being controlled by the position of the cock 70. By means of this movement that extends or shortens this arm, it will be easy to pluck off, wrest and detach the various objects, as sponges, coral etc., to be fished and it will be easy also to bring the operating point of the arm to the place and point required.
Having now particularly described the 2. An apparatus for submarine recovering and fishing operations consisting of an outer casing of an ovoidal form, provided with a: ………
5. In a device of the class described, a shell, derrick arms extending outwardly from the shell, a receptacle suspended from the derrick arms, means within the shell for operating the derrick arms, means to introduce material into the receptacle, and means to move the shell.
6. In a device of the class described, a shell, derrick arms extending outwardly from the shell, a receptacle supported by the derrick arms, means within the shell for manipulating the derrick arms, and means operable from within the shell for introducing material into the receptacle.
7. In a device of the class described, a shell, derrick arms extending outwardly from the shell, a receptacle suspended from the derrick arms, a telescoping arm extending outwardly from the shell above the receptacle, means to move the sections of the telescoping arm's
8. In a device of the class described, a shell, derrick arms extending outwardly from the shell, a receptacle suspended from the derrick arms, a telescoping arm extending outwardly from the shell of the receptacle, means to move the sections of the telescoping arm longitudinally, and means within the shell for moving the telescoping arm angularly upon the receptacle.
See other early Underwater Robots here.