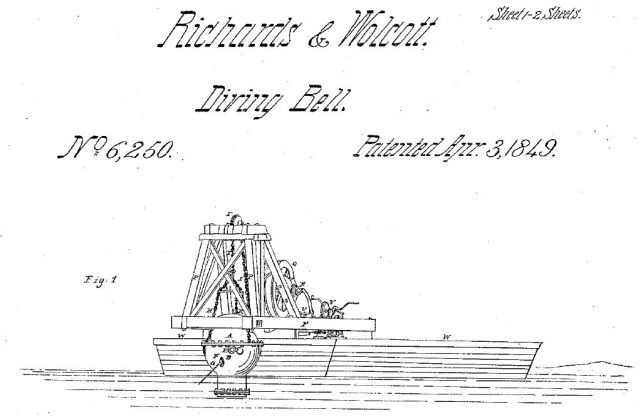
1849 – Diving Bell – Avery Richards and John Walcott
Deep-sea-diving bell
Publication number US6250 A
Publication type Grant
Publication date Apr 3, 1849
Inventors J. Avery Richards and John W. Walcott
Description
To all whom t may concern Be it known that we, J. AVERY RICHARDS and JOHN W. WALCOTT, of Boston, in the county of Suffolk and State of Massachusetts, have invented certain new and useful Improvements in Apparatus for Diving and Working in Deep Water, called a "Deep-Sea-Diving Bell"; and we do hereby declare that the following is a full, clear, and exact description of the construction and operation of the same, reference being had to the annexed drawings, making part of this specification, by which it may be distinguished from all other machines for like purposes.
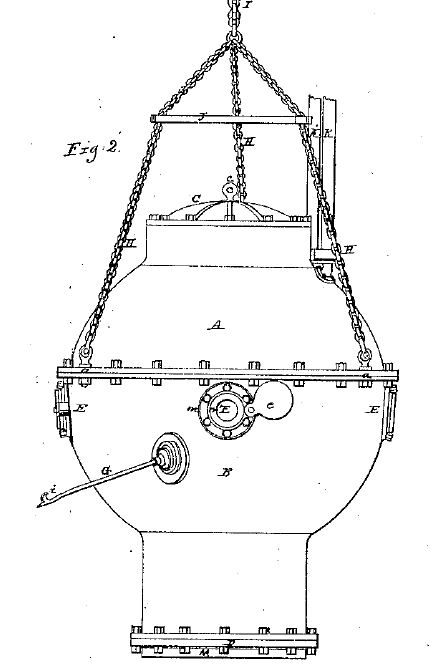
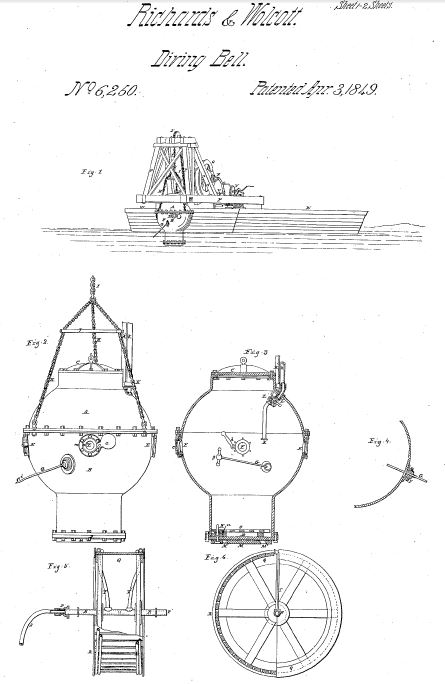
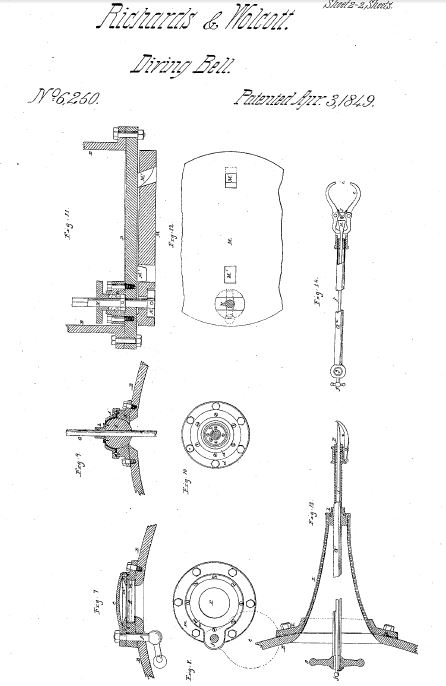
Figure 1, of the drawings is a perspective view of the bell with its accompanying apparatus, mounted upon a scow and ready for operation. Fig. 2, is an elevation of the bell to a larger scale showing more particularly the manner of its construction. Fig. 3, is a vertical section of the same through the center. Figs. 4, to 14, represent the different parts of the apparatus in detail, and, will be severally referred to in the description as occasion shall require.
The letters refer to the same parts in all the figures.
The main part of the bell is formed of two large hemispherical pieces of cast iron A, B, of the form shown in the drawing, which are bolted together by flanges at a, as shown; and are made sufficiently strong to resist any required pressure.
…….. F d is a ball and socket joint made of brass and ground to fit each other watertight, and firmly bolted to the bell as shown at Fig. 4;, and in detail at Figs. 9, and 10; through which the rod G passes. G is the working rod (so called) by means of which external objects are operated upon. It is made at its outer end i in the form of a hook, pike, scoop, forceps or other shape as experience shall show to be most convenient. The rest of the roll is turned straight and polished and passes through the ball F and is made water tight in the same by the leather packing b, or other similar contrivance which shall effect the same purpose. By this means the rod G can be drawn in or out or moved laterally in any direction. ……
See other early Underwater Robots here.