Space Schmoo . . . If you're a collector of acronyms (initials that make words) here's a beaut: Schmoo (for Space Cargo Handler and Manipulator for Orbital Operations). It's a vehicle that was designed by Lockheed Missiles & Space Co.
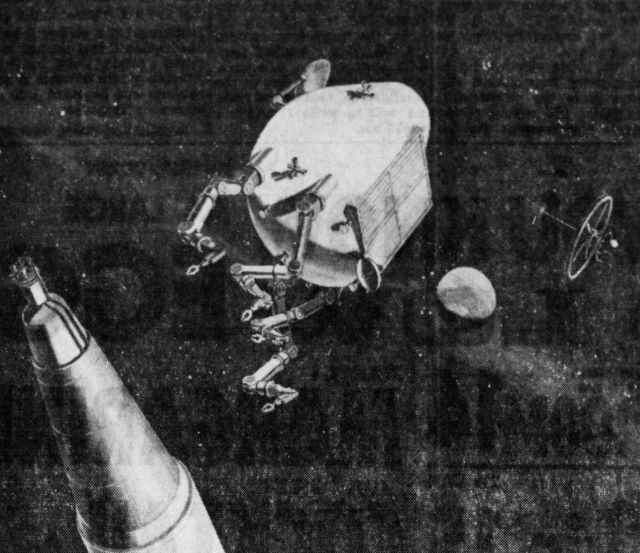
Caption: This is the age of monsters in space also. A four-armed SCHMOO approaches a nuclear-powered Snap vehicle in this artist's concept by Lockheed Missiles and Space company of Sunnyvale. Such an unmanned repair craft will be needed to service other spacecraft, particularly those using fuel dangerous to man, according to Lockheed, producer of the Polaris missile and the Agena satellite. A space station, shown in the background – with a planet further distant would be the mother ship for the remotely controlled SCHMOO. Repairs to a spacecraft would be done with the aid of a television camera on the SCHMOO.
Sunnyvale, Calif. – When a space station needs to haul aboard fuel or other supplies . . . when it wants to make repairs to another spacecraft . . . when it wants to clear the area of dead satellite! . . . How will It do It? Scientists and engineers at Lockheed Missiles & Space Co. today announced plans for a fix-it and do-everything vehicle which could be sent out from the space station and be controlled remotely by radio and television. With apologies to comic strip artist Al Capp, this Space Cargo Handler and Manipulator for Orbital Operations is called SCHMOO for short. Like Al Capp's character, spelled Shmoo, the Lockheed SCHMOO would be a pear-shaped creature, though somewhat larger – 15 feet wide, 18 feet long and 12 feet high. It would have four mechanical arms with hands capable of doing anything from tugging a vehicle to the mother space station, to replacing a black box of electronic equipment. The SCHMOO is a serious concept which, in the opinion of its three principal designers, Charles E. Vivian, William H. Wilkins and Louis L. Haas, can perform many difficult tasks which await the occupants of space stations. SCHMOO can be designed also to be controlled from the earth. A repair and service vehicle which does not carry a human operator and which can be controlled remotely has certain advantages. Handling nuclear vehicles, for instance. Suppose the space station occupants want to make repairs to a nuclear powered neighbor. First of all, the space station would want to stay at a safe distance. And to send a man to the nuclear vehicle would require him to be heavily shielded in a repair vehicle, still at some risk to him. The remotely controlled repair vehicle, however, could perform the task miles from the space station. Use of cryogenic (super cold) fuels, such as liquid hydrogen at 423 degrees F. below zero, will become more and more common with spacecraft. Handling of such fuels, however is hazardous to human beings. Suppose that cryogenic fuel is stored in a orbiting tanker, and that the space station is given the task of transferring some of this tricky fuel to another spacecraft. The remotely controlled SCHMOO could do the job. As conceived by Lockheed, two of the mechanical arms would be for grasping the object in space, and the other two highly articulated arms would be for performing more intricate and delicate tasks. The SCHMOO would be propelled by two engines, and would be equipped with 16 "microthrust" engines for attitude and position control of the vehicle. Floodlights mounted on the aluminum body of the SCHMOO would illuminate the area of the target vehicle with which the SCHMOO was concerning itself. Clear viewing by the operators located in the space station would be provided by a three-dimensional color TV system and a two-dimensional TV system, both mounted on the manipulating vehicle. Electrical power would be supplied by fuel cells, and the designers have even thought of a tool bit in which the mechanical genie would store its wrenches and other working devices. Considerable attention has been devoted to design of the manipulator systems. The manipulators would be more versatile and stronger than human hands. Moreover, to assist in dexterity and handling capability, the SCHMOO designers propose a computer system which will translate into action many of the operator's desires.
In more detail, what are some of the envisioned uses of the Space Cargo Handler and Manipulator for Orbital Operations? Here are some excerpts from the report prepared by the Lockheed designers: Space Tug Operations: There is no doubt that future space stations of any appreciable size will be assembled in space from forms or materials placed in parking orbits by multiple-launch operations . . . space tugs or tractors will have to be developed (to assemble these parts) … The SCHMOO has this capability and can operate in space before or after astronauts arrive on location. Cargo Handling: Extended space missions will require import of food and supplies at various times by means of ground launches . . . The SCHMOO can either bring the cargo vehicle to the space station for unloading or go to the cargo vehicle, unload the required supplies, and return to the space station with only the amount for which storage space is available in the station. Refueling: The logistics of fuel supply for extra-terrestrial missions will impose the requirement for fuel tankers in parking orbit. The SCHMOO can either take the spacecraft to the fuel tanker or take the tanker to the spacecraft. The SCHMOO will use its manipulators to position both vehicles, connect the required transfer lines, and transfer the fuel. Service and Maintenance of Orbiting Equipment: The SCHMOO can investigate meteoroid damage, replace components, patch holes caused by meteoroids, change batteries, exchange electronic components, and so on.
Rescue: At least smoe aspects of the over-all safety program (in space operations) will require the capability to rescue an astronaut who has experienced an accident. A case in point would occur when an astronaut in his space suit working in free space loses his hold, or his lifeline to the station, or his ability to maneuver with his self-contained propulsion system. The SCHMOO would stand ready to retrieve the astronaut and return him to the space station. Checkout: (For checking out the equipment on a satellite or other spacecraft) SCHMOO can transport and attach a separate pod which will include stimuli, pressurization equipment, additional telemetry, and command equipment for remote control from either a manned satellite or Earth. In addition, this pod could include a complete checkout computer to control all checkout necessary to test and evaluate flight equipment. Scavenger Operations: Today there are more than 250 satellites, boosters, and parts of boosters orbiting the earth . . . the amount of junk remaining in orbit . . . eventually will constitute at least a nuisance if not a hazard to subsequent operations (SCHMOO will be able) to track down and remove any objects located within the region of operations and posing a threat to the successful out come of a space mission. . . The method of accomplishment basically will involve destroying an object's orbiting capability by slowing it down sufficiently to enter a destructive orbit burnup will follow as it enters the earth's atmosphere.
Source: Santa Cruz Sentinel, Oct 14, 1964, "SCHMOO The Space Age's Mr. Fixit", By Cecily Browntone AP
LOCKHEED SPACE CARGO HANDLER AND
MANIPULATOR FOR ORBITAL OPERATIONS (SCHMOO)
The SCHMOO system was described to the 1964 proceedings of the 12th Conference on Remote Systems Technology as an unmanned vehicle capable of performing operations on a remote hostile spacecraft (i.e., a nuclear power type) while being controlled from an earth or orbiting base station (Vivian, 1964).
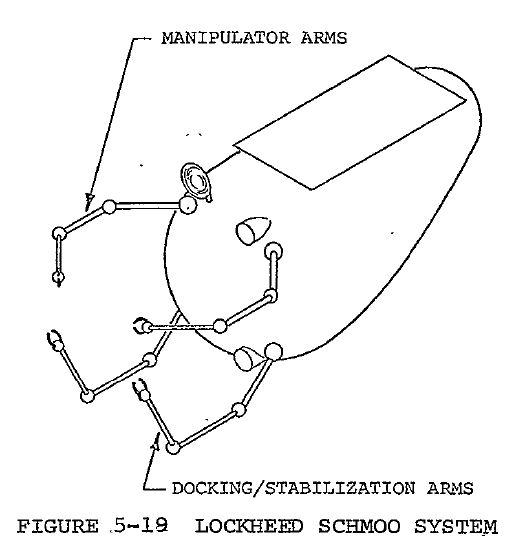
The SCHMOO, as shown in Figure 5-19, is an oblate spheroid with a width of 15 feet, length of 18 feet, and height of 12 feet. Its dry weight is approximately 7,500 pounds, and-its wet weight is 11,300 pounds.
Subsystem Description
Translation/Stabilization/Control Subsystem
Propulsion – This system consists of two pressure-fed hypergolic, bi-propellant reaction jets, each capable of delivering 200 pounds of thrust.
Attitude Control Propulsion – The attitude control system utilizes the same propellants as the propulsion units. It has 16 thrusters clustered in groups of four which provide the attitude and control. Their levels range from 1/2 to 1 pound.
Control – The control system for SCHMOO is comprised of two independent but cooperative subsystems. One is a computer-controlled guidance and attitude control system. It used a precision narrow beam (1 degree) radar in conjunction with the three-dimensional television monitor for locating the target vehicle, determining closure trajectory, closing, and attaching SCHMOO to the target vehicle. The computer is located on-board to reduce the number of communication channels required to operate SCHMOO.
The other control subsystem, which uses the same computer as used in guidance, is concerned with the operation of the manipulators. The manipulator control is a digital position differential system with a position control and monitoring accuracy of 0.1 percent. It has a rate application, within mechanical system limits, proportional to the error differential.
Actuator Subsystem
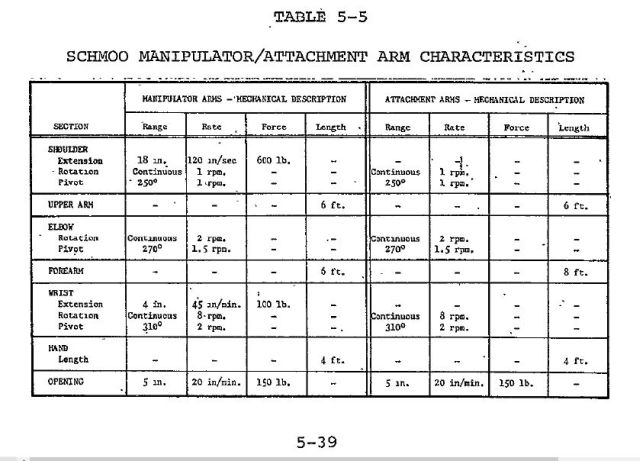
The vehicle is equipped with four articulated manipulator arms. Two arms are located on the lower portion of the vehicle and are used for docking and stabilizing the vehicle at the worksite. The other two provide the manipulative capability. The SCHMOO arms are patterned after the General Mills Model 500 manipulators. A description of the arms is given in Table 5-5.
Visual Comminications Video
The SCHMOO is equipped with two complete, independent television systems which provide both visual monitoring of the final stages of approach to a target and observation of the tasks performed by the manipulators. One has three-dimensional color transmission with two camera pods mounted on opposite sides of the radar tracking antenna and interconnected so that adjustment of focal length automatically adjusts parallax.
The second system employs two independent two-dimensional black-and-white camera pods located on the "backs" of the manipulator hands for direct monitoring of the hands; this system also can be used as a backup for the three-dimensional color system without automatic parallax control.
See other early Teleoperators here.
See other early Lunar and Space Robots here.