Humanoid robot – Source: here. (English via Google translate – some words not translated)
Alexander Mészáros – a retired college professor, expert
In past times, it lost in the attempt, when a man tried to prepare themselves for similar creature. Õsember've probably wanted to take part in the creation of a "mûember 'delight. The most ancient religions, priests, wizards also created mechanically propelled humanoid machines to impress the faithful.
You can not forget the Hungarian Kempelen kísérleteirõl, the most successful creation of the chess-playing automaton, which is considered the most successful contemporary solution counts. In 1769 he created a talking handset Kempelen a Viennese court's request. I wonder what would have been able to form Kempelen today, if he were alive?
The development of humanoid robots are the real big boost in computing was when the robot body movement into or out of the built-in PC, and modern electronic elements not only control, but could also be programmed. In the sixties, considerable research has been the development of more intelligent humanoid robots.
The author in 1987, thought to build their own purposes, humanoid personal robot, which is less visible and gépszerûnek must also imitate human movements need to know.
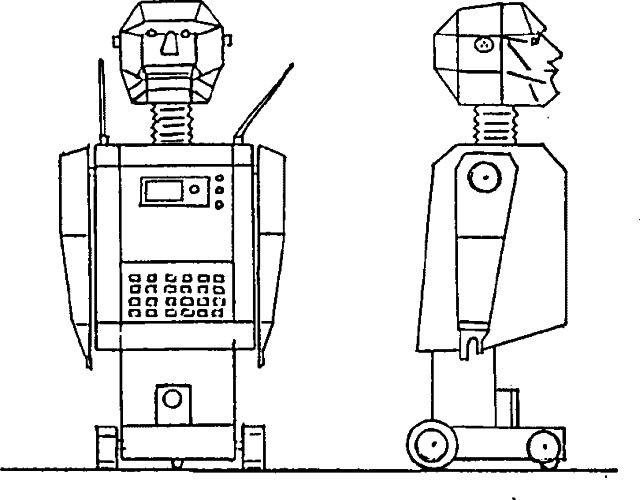
Figure 1 shows the appearance of the robot shown in the drawing. 1 m. tall, all-metal robot built three-wheel moving. Rear wiper motors drive wheels are carried back and forth from one side and stopping the engine from side to side is capable of turning. The sole foot protruding partially seated in the batteries. The bellies of the relatively large size provides plenty of space for the electronics. The chest located beneath the display provides computer monitor's small, but switched to TV reception as well. The middle ground is a programmable four-channel control unit, which controls the movements of the head.
The robot's neck pleated stainless steel cylinder that enables movement in all directions to the head, also hides the numerous wires and actuator mechanics. The head is also made of stainless sheet steel. I tried to approach the design of the human head artistically, so I kept the third exports worth to keep. Accompanying the movement of the mouthpiece speech is achieved. The microphone on the outer ear in recording the conversations serve as a digital voice recorder.
The robotic arms can be moved. The electromechanical servo-system right hand. The left arm raising movement muscle wire carries. Clearly visible is the difference in terms of space and súlykihasználás. Five fingers of the hand has been established after a long period of experimentation, which also will move muscle wire. The robot's shoulder with a miniature camera is placed in front of them about that displays recorded images on the Display.
The robot's movements and many functions can be controlled with several different ways. The multi-channel remote control CL6 M Graupner 40 MHz can be up to about l00m control. A robot built-in light and hangérzékelõkkel and using computer programming and more sophisticated detection is possible. The 6-watt Audio Boost sound enough strength to return to the digital recorder or walkman kazettájáról sound information when the robot moves his mouth during speech.

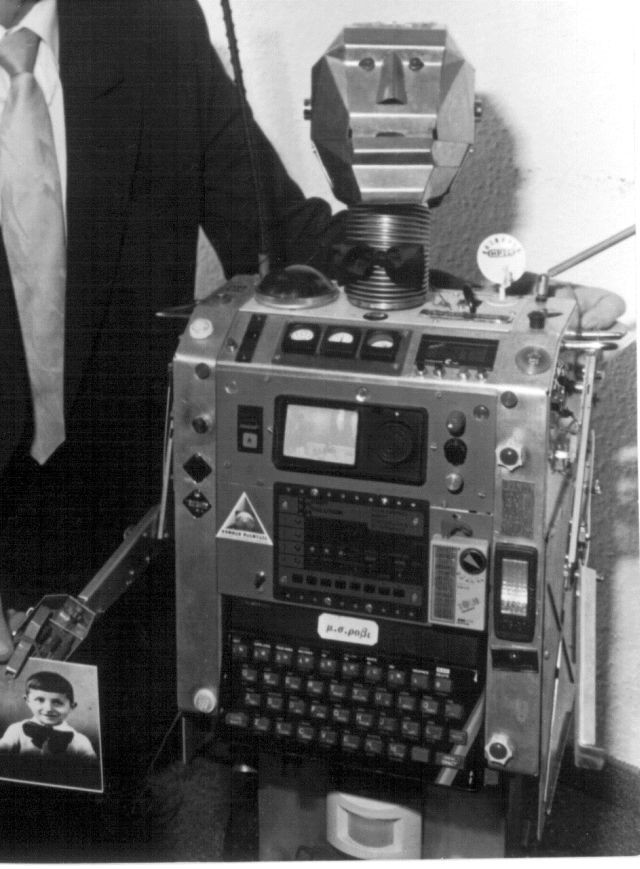
Figure 2. Alexander Mészáros with his Humanoid robot .
Finally, their studies and experience gained in building the robot and the world of research results still show the words of Sophocles:
Many of you, our wonderful,
But the man is not
Nothing more beautiful.
[Original Hungarian]
Emberszabású robot
Mészáros Sándor
nyugalmazott fõiskolai tanár, szakértõ
A régmúlt idõk homályába vész az a próbálkozás, midõn az ember magához hasonló lényt próbált készíteni. Már talán az õsember is vágyott részt venni a "mûember" megteremtésének örömében. A legõsibb vallások papjai, varázslói is alkottak mechanikusan mozgatott emberszabású gépeket a híveik elkápráztatására.
Nem lehet megfeledkezni a magyar Kempelen Farkas kísérleteirõl, legsikeresebb alkotásáról a sakkozó automatáról, amely még ma is a legsikeresebb korabeli megoldásnak számít. 1769-ben egy beszélõ masinát is alkotott Kempelen a Bécsi Udvar kívánságára. Vajon mit volna képes alkotni ma Kempelen, ha élne?
Az emberszabású robotok fejlõdéséhez az igazi nagy lendületet a számítástechnika hozta, amikor a robotszervek mozgatását a beépített vagy kívülre helyezett számítógéppel, s a korszerû elektronikai elemekkel nemcsak vezérelni, hanem programozni is lehetett. A hatvanas években már jelentõs kutatás folyt minél intelligensebb emberszabású robotok fejlesztésére.
A szerzõ 1987-ben gondolt arra, hogy megépíti saját célú, emberszabású személyi robotját, amelynek kevéssé kell gépszerûnek látszania és az emberi mozgásokat is utánoznia kell tudni.
Az 1. ábrán a robot külalak rajzát láthatjuk. Az 1 m. magas, teljesen fémépítésû robot három keréken mozog. Hátsó meghajtott kerekeit ablaktörlõ-motorok hajtják elõre-hátra, és az egyik oldali motor leállításával jobbra-balra is fordulóképes. A talpból kinyúló lábrészben foglalnak helyet az akkumulátorok. A hasrész a viszonylag nagy méretével bõséges teret biztosít az elektronika részére. A mellrészen elhelyezett display szolgál az alatta lévõ kis méretû computer monitorának, de átkapcsolható TV-vételre is. A has közepén egy 4 csatornás programozható vezérlõegység van, amely a fej mozgásait vezérli.
A robot nyaka rozsdamentes harmonika henger, amely a fej részére minden irányú mozgást lehetõvé tesz, egyben elrejti a számos vezetéket és fejmozgató mechanikát. A fej ugyancsak rozsdamentes acéllemezbõl készült. Kialakításánál igyekeztem az emberi fejet mûvészien megközelíteni, ezért a harmadik kivitelt tartottam érdemesnek megtartani. A szájrész beszédet kísérõ mozgását is sikerült megvalósítani. A fülekben lévõ mikrofonok a külsõ beszédek rögzítésére szolgálnak digitális hangrögzítõkön.
1. ábra
A robot karjai mozgathatók. A jobb kéz elektromechanikus szervórendszerû. A bal kar emelését, mozgatását izomhuzal végzi. Jól látható a különbség hely-és súlykihasználás szempontjából. A kézfejen öt ujjat sikerült hosszú kísérletezés után kialakítani, amelyeket ugyancsak izomhuzal fog mozgatni. A robot vállán egy miniatûr kamera van elhelyezve, amely az elõtte állókról felvett képet a displayen jeleníti meg.
A robot mozgását és számos funkcióját többféleképen lehet vezérelni. A Graupner M Cl6 sokcsatornás távirányítóval 40 MHz-en lehet akár l00m-rõl irányítani. A robotba beépített fény- és hangérzékelõkkel és a computerrel bonyolultabb programozás és érzékelés is lehetséges. A 6 W-os hangerõsítõ elegendõ hangerõvel adja vissza a digitális hangrögzítõ vagy a sétálómagnó kazettájáról a hanginformációt, amikor a robot szája is mozog a beszéd alatt.
2. ábra
Végezetül saját tanulmányom és a robotépítésben szerzett tapasztalatom, valamint a világ kutatóinak eredményei bizonyítják még mindig Szophoklész szavait:
Sok van, mi csodálatos,
De az embernél nincs
Semmi csodálatosabb.