1978 – "Kermit" the Robot by Ron Milner and Larry Nicolson of Cyan Engineering for Atari Inc.
Owen Rubin Shows "Kermit" Ataris Prototype Robot Pet from Jeri Ellsworth on Vimeo.

Images from Owen Rubin's website here.






Kermit's fabricated security pass.
The Story Of Kermit The Robot by Owen Rubin.
I did not build Kermit. It was originally built by Atari's Engineering group in Grass Valley, California. Kermit was abandoned in the Sunnyvale offices, and I rescued him. I did some electronic work to make it run again (needed some rework on a some parts, and all the motion sensors for the wheels and head needed to be changed) and wrote some new software to make it do different things. As you can see, he is not in the best shape right now. It will power up (the battery is dead, but a desk power supply will work) but one motor has gone bad, and the sensors are out again. He also took a spill down the stairs at Atari in his last few days (my own fault for just letting him run free around the building) and it cracked his head (a plastic bowl) and broke a bunch of the bulbs in the head dome. Some day I may actually get him running again.
The hair was a joke of mine! There is a small button under the hair, so if you pet him, he stops and purrs! I also MADE the name badge, it was not an official badge. The security people were VERY angry that I made it, because it looked so good.
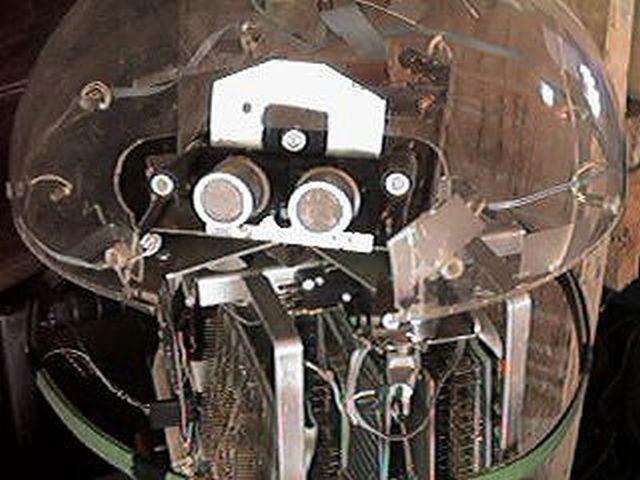
If you look at picture 10, you can see the sensors. The two big ones are ultrasonic, like the old Polaroid cameras. His head can rotate 180 degrees in EACH direction so he can "see" 360 degrees. When he would bump something, or sense an object in his way, he would stop and rotate his head through the full 360 mapping all directions, then go in the direction that had the greatest distance clear.
Next to the ultrasonic sensors are two microphones for sound. At the time, the only sensed sharp sounds like a hand clap. When the heard a clap. He would stop and turn his head towards the sound. A second clap would further define the direction and he would head towards the sound.
Below is a small heat sensor (we wanted him to look for warm bodies, but he would head into fireplaces. Never got that working. Above is a light sensor, "walk towards the light" was the idea. If a room went dark, he would look for light and sound.
Also visible is a small "leash" connector (directly under the dome below his left (our right) mic. This was a pot with a small switch. If you pulled on the leash, the switch would close and Kermit would try and center the leash to go that direction. He would continue to move "forward" or which ever way centered the leash until the switch opened (ie, he got close) and then wait for about 30 seconds before trying to move on his own. His first move was always straight backwards to see if the leash would tighten and close the switch.
He also has an antenna for remote control (used an old Radio Shack walkie-talkie with some tones for remote (required another board to be plugged into the bus slots (there is one empty.)
There are 4 boards in Kermit right now. Photos 2 and 7 show the end board which had all the sensor interface circuits and light drivers for the head. In Kermit 4 you can see the other board in the slots. The next one over is a "mouse brain", which is a small 6502 and EEPROM and RAM. The third board is a sound driver, simple wave circuits for music like sounds. He sounds a bit like R2D2! The last board is the driver relays for the stepper motors for the back wheels.
The wheels are direct driven by stepper motors that are held in by springs against the wheels. The front wheel is simply a castor with a leaf switch attached. The idea was that IF the leaf switch opened, Kermit would do an "emergency back" move. Basically, an R2D2 scream sound and both motors back as fast as possible for a short burst. Again, this was assumed that he was going over a ledge. Unfortunately, his death was in just such a move, as his weight is too front heavy, and he screamed and spun his wheels backwards as he tumbled down the stairs at Atari (seems that the stairs were the longest open space, and while the switch did work, he weight tipped him over head first before he could back up.)

Extract from Atari Inc. – Business Is Fun, by Marty-Goldberg-Curt Vendel, 2012. p259-65.
……..
On May 25, 1977, the entire entertainment industry and our societal culture are altered in a permanent and monumental way. Nearly every facet of society discovers a whole new world brought to the big screen from a 'galaxy far, far away…' Star Wars premieres and takes not just America, but the entire world by storm!
With a storyline that revolves around knights wielding swords made of light, on a secret mission to save the princess from the evil empire, recover stolen plans and destroy the ultimate weapon… a new culture is born and the next generation of technologically advanced cinema lays the groundwork for the complete retooling of the movie theatre environment. All of this is put together with never-before-seen realistic groundbreaking special effects, sounds and a background score written by John Williams and performed by the London Symphony Orchestra.
The movie showcases some of THE most realistic spaceship designs, laser pistols and computer terminals seen to date, along with two `droid' robots which are not only pivotal to the storyline, but provide an almost comic relief to the movie. One is a bumbling, skittish humanoid looking droid called C3PO who can speak proper English, among its numerous other dialects. The other is a cute small domed top Astromech droid called R2D2.
This particular character cannot speak any verbal words, but communicates by cute and emotionally toned bleeps and chirps, all which convey its demeanor and tone remarkably well to the audience. Unlike the countless sci-fi movies spanning decades prior, Star Wars created a used universe instead of shiny, clean and perfect objects and characters. Everything appears used, worn and working just as real world common items look outside of the movie theatre. The technologies shown in this movie seem plausible and reasonable, causing the audience to think and wonder "Why not?" So if there are realistic robots in the movie, why not real robots in today's world?
Star Wars would set imaginations ablaze with the burning desire to see those technologies becoming something everyone could own. With the accomplishments of the space race (landing on the moon, walking on the moon and satellites being lofted into space on a nearly monthly basis), space and technology were a real part of society. Magazine and newspaper articles of the day showed a stream of topics about how computers were improving society and were now within the reach of individuals to own in their own homes.
During the two years prior to the Star Wars premiere, people were already connecting high tech video game devices to their home televisions to turn the usual evening of cards or board games into a futuristic battle of skill on the video play-fields. Everywhere within society's gathering places – from bars, restaurants, bowling alleys and more, coin-operated video arcade games were popping up and becoming commonplace. The world was becoming more like the futuristic fantasies of the big screen, so with all of these marvels of technology it was very easy to accept the idea that soon robots would be seeing us to our seats at restaurants and cleaning windows on the sides of tall glass skyscrapers. Who knows – those nights of playing video games on the home TV might soon be played against a personal robot sitting right there holding the controls and battling it out against us in a round of Home PONG… that is, AFTER it had just brought out a tray of snacks and a few ice cold drinks.
Just a few weeks shy of the one year anniversary since the premiere of Star Wars, Ron Milner and Larry Nicolson of Cyan Engineering draft an Atari Inter-office Memo to Al Alcorn, Steve Bristow, Nolan Bushnell and Joe Keenan. Dated May 1, 1978, the subject is: "Proposal – Kermit the Robot." Kermit is actually meant to be an extension or a compliment to the 'Colleen' computer system. In the memo, it's explained that 'Kermit is an inquisitive little fellow who can get around a bit on his own but whose personality develops fully when working with the Colleen system. He can be operated through Colleen to act as remote eyes and ears for the user's program.' How Kermit would 'talk' to Colleen was a rather unique implementation. Instead of a wireless link, Kermit and Colleen would communicate using audio tones; in fact the tones would actually be a part of the robot's personality and provide a low cost means of communication.
As the R2D2 robot 'talked' through chirps and bleeps to the actors on the screen and to the audiences in the theatres, the Kermit Robot would do very much the same thing to communicate with its intelligent home base – Colleen. On May 26th, the Kermit robot project is approved and work commences. The first order of business is a drive train to allow the robot to move and navigate. Surface measurements for starting and maintaining force are calculated for wood, tile, linoleum, shag rug, pile rug and climbing onto and off of a throw rug. (all that was left to check on would be if Kermit could handle the harsh conditions of the planet Tatooine)
An interesting project was piggybacked off of the robot development called `Robot Chess.' Since the Cyan engineers were already deep into the development of a robot, these concepts and designs could be further evaluated and implemented into a board game of chess. The design was created on Atari's 6th anniversary (June 27, 1978), however the idea is never worked on past the concept stage.
In December of 1980, a company by the name of Applied Concepts would release nearly the same Chess game design, called BORIS HANDroid. Retailing for a staggering $1,400, the Cyan engineers believed they could have done a product with a retail cost of under $250 back in 1978 – yet another idea that Cyan prototyped goes out the door to be sold as a product, but unfortunately, not by Cyan.
As Kermit is being developed, the team begins to look at fun and playful capabilities and even accessories for the robot. Up and Down servo's are considered so it can 'dance' by bopping up and down – it could have lights, have the top turret turn, floor reflective sensors to follow paths and of course, what robot shouldn't also have its own super-squirt gun for water fights around the house? Yes, a design is drafted for a mechanical squirt gun to shoot water at Kermit's owner and companions. By September, work is proceeding to the point where the team starts to work on its own language for Kermit (called `ROBOL') to allow simple plain English commands to be entered into the Colleen computer and then translated into Kermit's own language.
Also during September, a second project is spun off from the Kermit design work. Larry Nicholson wants to do a stripped down toy robot based on the early stage design work with a single chip controller onboard and sensors that would include feelers, light and maybe a microphone for detecting sounds. Initially called mini-Kermits, they get their own designations – Varmit, Furmit and Wurmit.
It's finally time for Kermit to stretch his legs, or to be a bit more accurate, spin its wheels. Tethered to a desk control module via a long ribbon cable, Kermit is placed onto a large sheet of engineering drafting paper normally used by Atari engineers to draw out schematics, mechanical drawings and circuit designs. Kermit is fitted with a pen and a test is performed to gauge Kermit's navigational accuracy. Commands are sent to the onboard systems – Run, Turn, Run, Reverse, Turn, Run and Maneuver. Some wheel errors are detected during the turns and the team thinks this can be corrected through the software control. Kermit has taken its first `baby steps.'
Kermit took a walk with its leash (the ribbon cable attached the desktop control module) in October. Unfortunately, it's quickly discovered that Kermit cannot negotiate carpet! This is a serious failing and several major design changes needed to he made including wider drive wheels and a wider front direction castor wheel. The weight will have to be reduced quite a bit and also, Kermit's center of gravity is too far off because of the weight of the large battery behind the main axle.
Meanwhile the mini-Kermit idea has now moved into its own full blown project and a patent as well. On November 8, 1978, an Atari Invention Disclosure Form is filled out and submitted by Ron Milner and Gene Wise for their invention: Toy Robot. In the electronic toys class, the product is called `VARMIT.' On December 1st a fully working Varmit is completed and tested using one-wheel drive and two trailing wheels – the design proves to be very agile and maneuverable. Varmit looks like furry mouse; it even speaks by making noises, using a simple 555 timer chip and a small 4-bit DAC to control pitch and a capacitor to do a frequency sweep. The resulting sounds are cute and pleasant and fit the furry little robot.
Ron Milner notes on December 1, 1978 in his engineering logbook that "Varmit is now off to the Warner's Board meeting with Nolan. Some decision can be expected eventually." Unfortunately this board meeting would be the catastrophic showdown between Nolan Bushnell and Manny Gerard that turns into a drop down screaming match and ends with Nolan being removed as Chairman and CEO of Atari. Varmit never gets its chance to become a new Atari product, however, strangely enough, Varmit does not go away quietly.
By the mid 1980s, Varmit will make its return thanks to Nolan Bushnell. Initially called 'Micro Pets,' the new line of robots are officially called `Petsters' at their release. The Petsters would have all of the same characteristics and features of Varmit, and much more. They will don new personas, coming in all shapes and sizes – from cats, dogs, hamsters… and even a spider which was more of a hardwood floor mop than an entertainment robot.
At Cyan through November and December of 1978, work on Kermit continues and now most of the control and sensor logic are onboard and programming work continues. The team also realizes that the `Robol' language was becoming difficult to check out and may have been a mistake to create and implement, as it's making debugging the routines hard. Also, teaching Kermit things, like how to self navigate out of a corner and how to choose the longest free path were slow to implement.
Making matters worse, pressure was coming down from the top that Cyan needed to show something that demonstrated and worked properly or the project would be terminated. After two weeks, Kermit was now freely wandering the Cyan labs without bumping into things (most of the time) by using its onboard ultrasonic range sensors. Some housecleaning work on its routines were being done to fine tune its ability to navigate and sense its surroundings, and the team hoped to then start to add in some more interesting behaviors. But before they get to the next phase, on January 21, 1979 word comes to Cyan… Kermit has been canned due to Atari politics. Essentially the project was only being championed by Nolan (whose original mandate to the Cyan guys was 'design a robot that can bring me a beer') as well as Joe Keenan, Al Alcorn and Steve Bristow. However by January 1979, Nolan had been removed from his role in the company, Joe Keenan was now the Chairman and Steve Bristow was tasked with spinning down the Pinball manufacturing building and retooling it to build the new line of Home Computers which just debuted at the Winter CES in Las Vegas.
Kermit would still continue to be an active member of the Cyan engineering group though, traveling about the office. Chirping, beeping and happily maneuvering around the lab benches. Kermit even had its own Atari ID badge, only the second of two non-humans to ever have the privilege of being officially 'unofficial' Atari employees – the other was Mitchy, Jay Miner's dog.
Brought down to Atari's engineering building in Sunnyvale a few times, finally at one point after the project is no longer being active, Kermit was given to Owen Rubin to become its adopted caretaker. Kermit would sit in Owen's office until Owen began tinkering with its ROM code, trying to add some additional intelligence to its programming. Through some trial and error with this new programming, Kermit is sent off down the hallway to venture around the offices of the engineering building at 1272 Borregas Avenue.
Sadly, Kermit would ultimately meet with disaster. While some basic safety mechanisms were built into Kermit, they were not quite refined enough for long unattended excursions. On the front wheel of Kermit is a drop switch sensor so that if the front wheel of Kermit were to drop down suddenly, it would let out a squealing sound and immediately back up. However the sensor timing and its ability to react were not fast enough to save the little guy from a final deadly spill. One day Kermit took to his usual roaming of the halls of Atari, joyfully chirping and maneuvering about when he happened upon an open door to the stairwell. Kermit moved to the edge of the top stairs… its front wheel dropped as intended, but momentum and gravity would be quicker then Kermit's sensor and programming. Suddenly a blood curdling robot squeal echoes throughout 1272, followed by crashing, bouncing and breaking sounds.
Owen and others in the Engineering department ran to the stairwell – lying at the bottom of the next landing like humpty dumpty was Kermit, its dome cracked slightly and some components jarred out of place. Kermit's days of roaming the halls of Atari sadly came to an end that day and from then on, he would stay in the office, motionless and chirpless. When Owen left Atari, Kermit was taken home to become a part of Owen's collection of Atari memories.
No, this "Kermit the Robot" is not the robot version of "Kermit the Frog".