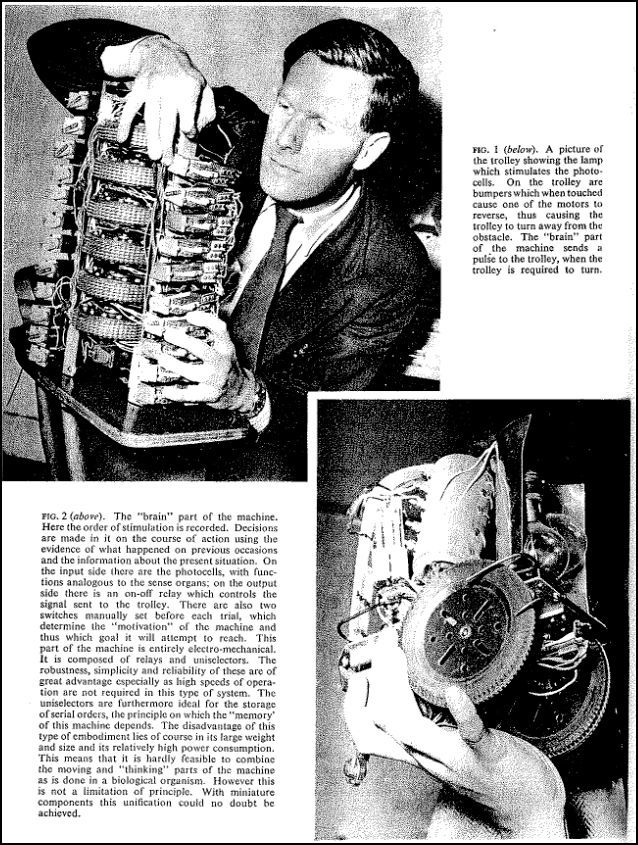
Anthony Deutsch, aged 26, with his maze runner from Oxford University's Institute of Experimental Psychology.
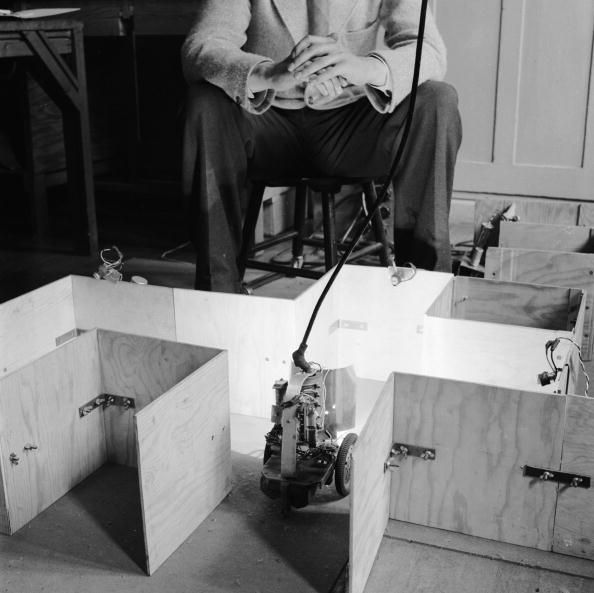
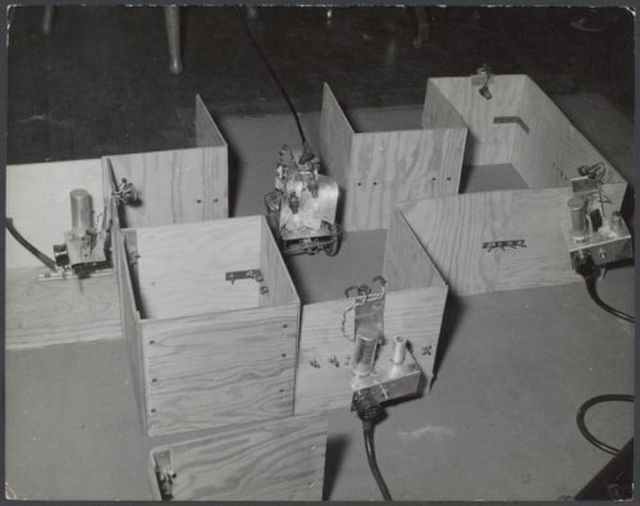
The head-lamp on the trolley is turned on, and various photo-electric cells are mounted at strategic points in the maze.

Deutsch's Maze runner was considered the most sophisticated at the time. It was capable of transferring its training from one maze to another which is topologically equivalent even though its lengths and shapes have been altered. Deutsch's maze-runner also takes advantage of short cuts added to the maze. (from Martin Gardner 1961)
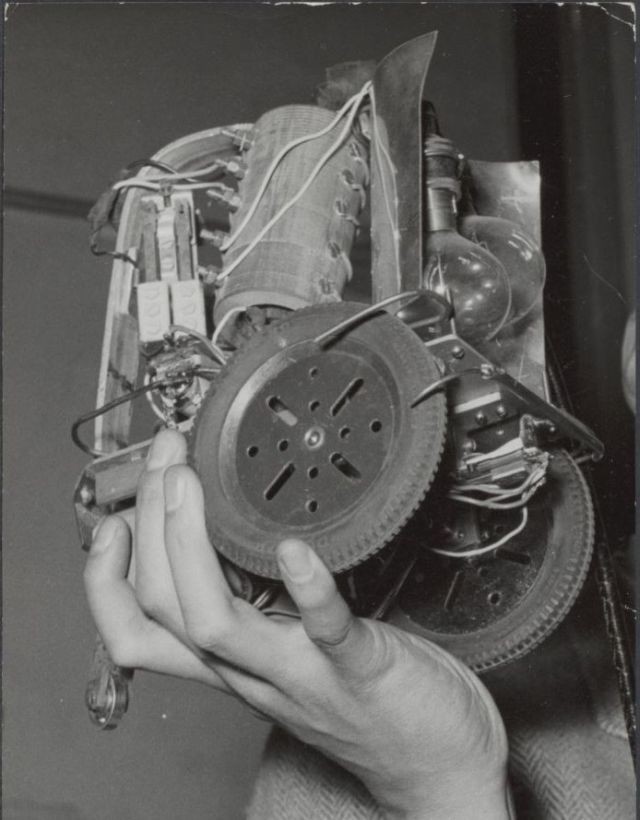
The system consisted of six uniselectors and twenty-three relays. The uniselectors have six wipers each, and are ordinary Post Office (P.O.) equipment. Only three positions are employed on each. The relays are similarly large P.O. relays with four "make" and one "break" contact.
Deutsch, J.A. "The Insightful Learning Machine", Discovery 16:12 1955 pp 514-517. pdf here
Deutsch, J.A. "A Machine with Insight", Quarterly Journal of Experimental Psychology Vol.6 part I pp 6-11. pdf here.