Source: Popular Mechanics, Aug 1965.
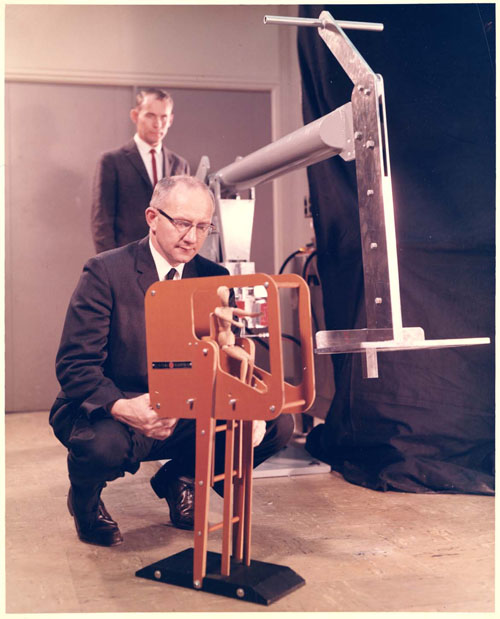
Ralph Mosher bending over the Pedipulator. Possibly Ed Ziegler in the background.
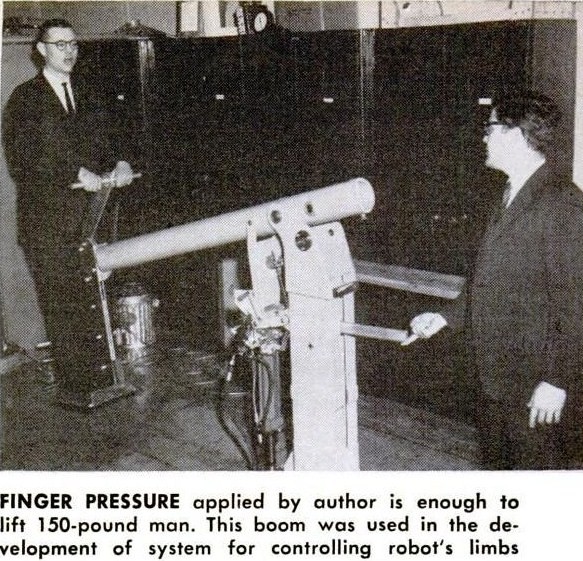
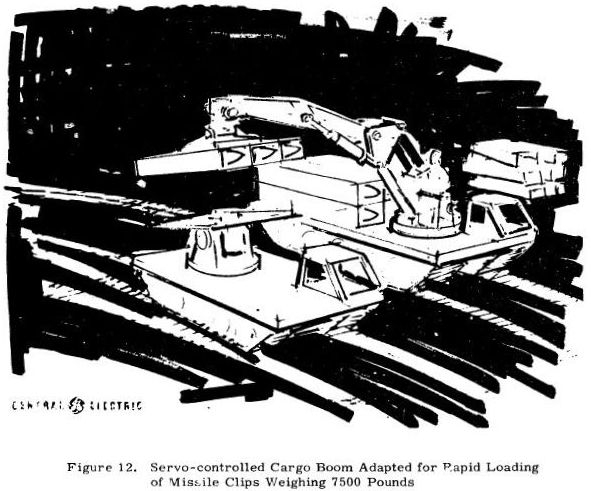
G.E. Lifting Boom
Publication number US3333716 A
Publication date Aug 1, 1967
Filing date Dec 28, 1965
Inventor: Edwin E Ziegler
Original Assignee Gen Electric
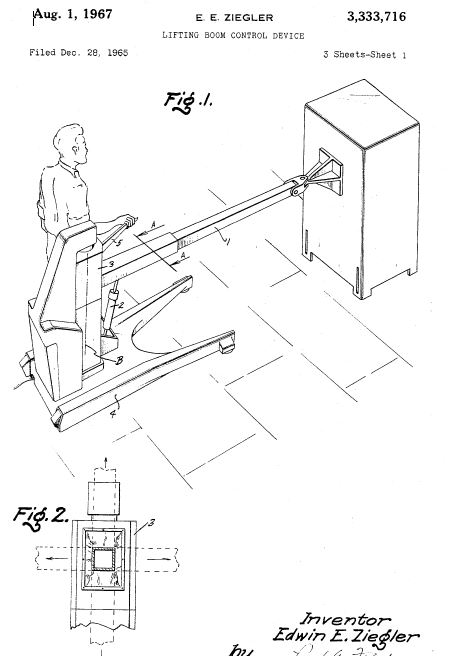
ABSTRACT OF THE DISCLOSURE A material handling device having an extensible lifting boom carried by a hoist and carriage and controlled by a handle. The carriage is mounted for rotation about vertical pivots to accomplish azimuth rotation of the boom. The azimuth motor is located in the base of the hoist and the boom is pivoted in the carriage for vertical movement. A hydraulic cylinder mounted between the boom and carriage imparts vertical movement to the boom and an extensible cylinder causes the extensible boom to extend or retract. In each motion there is spatial correspondence between the control element and boom tip and also a diminished force is fed back by lever systems from the boom to the control handle to give feel.
My invention relates to a hydraulically operated boom. This invention relates particularly to a hydraulic boom having return feel and has correspondence of movement between a control handle and the boom in azimuth and elevation. The apparatus will be described particularly in relation to a boom but is understood to be equally adapted to remote control of devices such as guns, power shovels or any other extended member wherein the characteristics of this invention are important.
In the movements of objects, it is a common occurrence that one wishes to move an object under load. When one wishes to move some object against a force of some sort, it is advantageous to have a feel in the control handle or shaft which corresponds to the amount of force put forth in overcoming the resistance to such movement. It is further advantageous if there is a spatial correspondence between the control handle and the object being moved. If both feel and spatial correspondence are present in the apparatus, the operators situation is most analogous to his physically moving the load. In prior art machines where these characteristics are absent, the operator must spend time to learn a new set of relationships between movement and feel of the control handle and the movement of the load.
A chief object of the present invention is to provide a lifting boom having a return feel which is a small portion of the force being exerted and having a spatial correspondence between the boom and the control handle. With my invention, the operator can position the load with deftness and accuracy.
Another object of this invention is to provide a system adaptable to control any device pivoted for universal movement.
Another object is to provide a compact easily controllable system for hoisting loads wherein the operators control movements are the same as he would use in physically moving the load. Thus in an emergency the operators spontaneous reactions are most likely to be correct.
Another object of my invention is to provide a device capable of doing the work of one or more men with corresponding less work and fatigue to the operator.
Another object of this invention is to provide a single control element or actuator for operating a plurality of operating motors in conjunction to accomplish the single purpose of moving an object about a pivot.
These and other objects will be more readily perceived from my description which follows.
Briefly stated, my invention is a control device which operates to move any extended member about a pivot in azimuth or vertically and to change the length of the extended member. The movements of the extended member correspond in direction to the movements of the single control member. In addition, some of the force applied to the extended member is fed to the control member to give it feel. Thus the extended member moves in the direction of motion of the control member and some of the force applied to the extended member is fed to the control member. In this way the operator will know the direction of motion of the extended member and will have an idea of the amount of force being applied to the extended member.
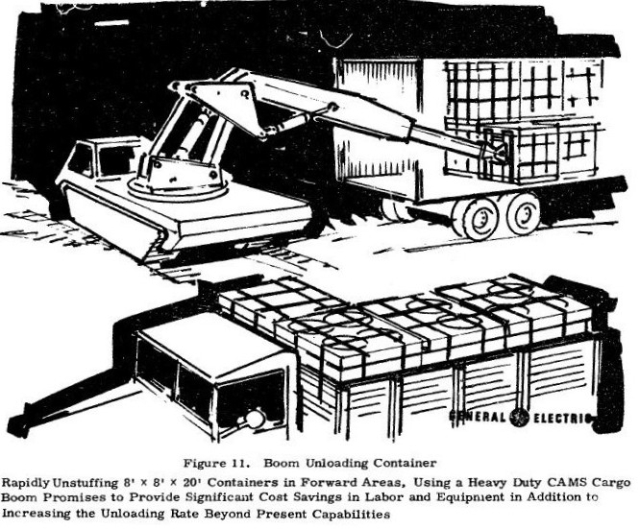
Mosher’s future concepts of his CAMS concept included options for the Boom.
See other GE CAMS here:
") 1956- GE Yes Man
1956- GE Yes Man") 1958-9- GE Handyman – Ralph Mosher
1958-9- GE Handyman – Ralph Mosher") 1962 – GE Pedipulator – Ralph Mosher
1962 – GE Pedipulator – Ralph Mosher 1969 – GE Walking Truck – Ralph Mosher
1969 – GE Walking Truck – Ralph Mosher") 1969- GE Man-Mate Industrial manipulator
1969- GE Man-Mate Industrial manipulator