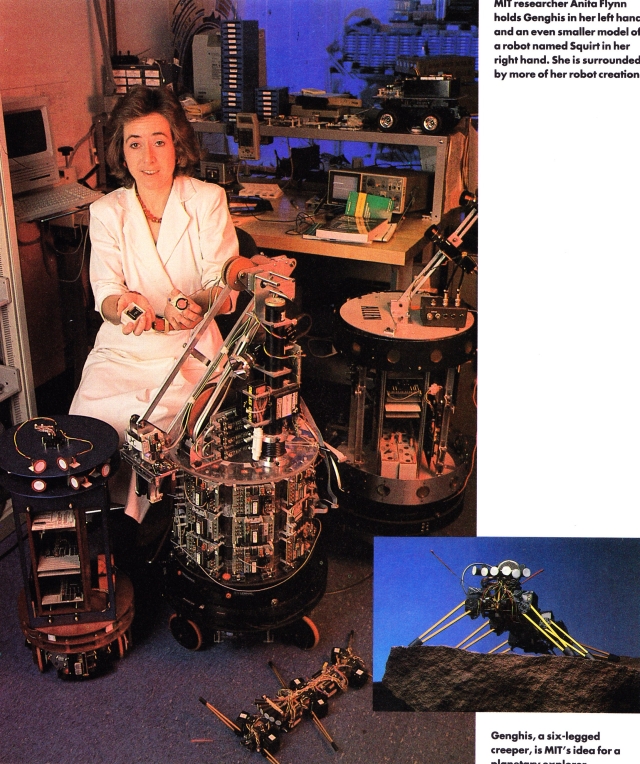
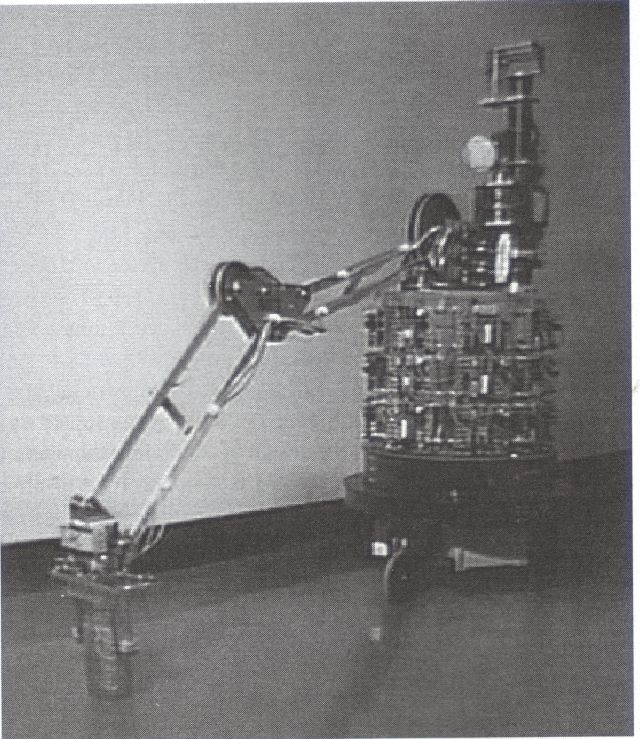
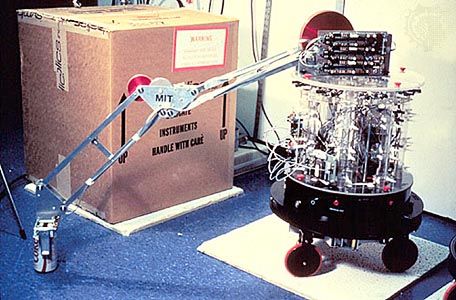
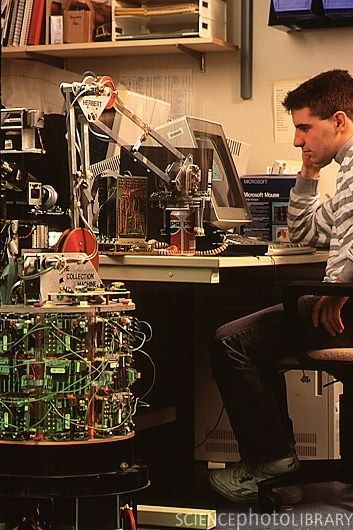
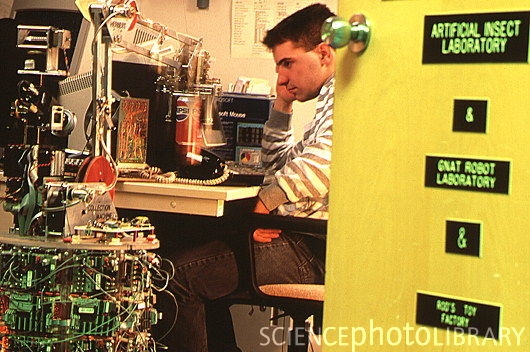
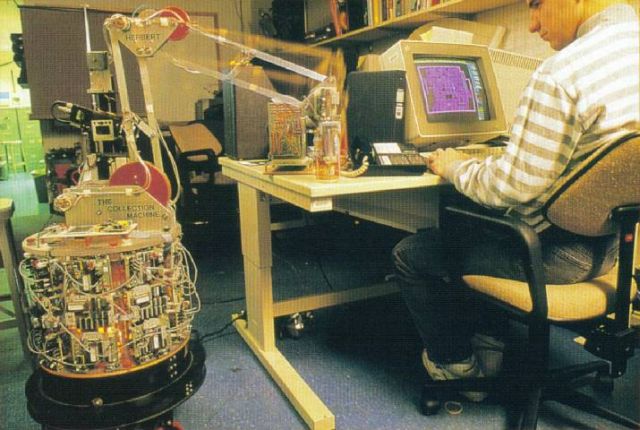
Herbert – A Soda Can collecting robot (named after the AI pioneer Herbert Simon).
In mobile robot research we believe the structure of the platform, its capabilities, the choice of sensors, their capabilities, and the choice of processors, both onboard and offboard, greatly constrains the direction of research activity centered on the platform. We examine the design and tradeoffs in a low cost mobile platform we have built while paying careful attention to issues of sensing, manipulation, onboard processing and debuggability of the total system. The robot, named Herbert, is a completely autonomous mobile robot with an onboard parallel processor and special hardware support for the subsumption architecture [Brooks (1986)], an onboard manipulator and a laser range scanner. All processors are simple low speed 8-bit micro-processors. The robot is capable of real time three dimensional vision, while simultaneously carrying out manipulator and navigation tasks.
 Photo: Rob Miles (thanks David).
Photo: Rob Miles (thanks David).
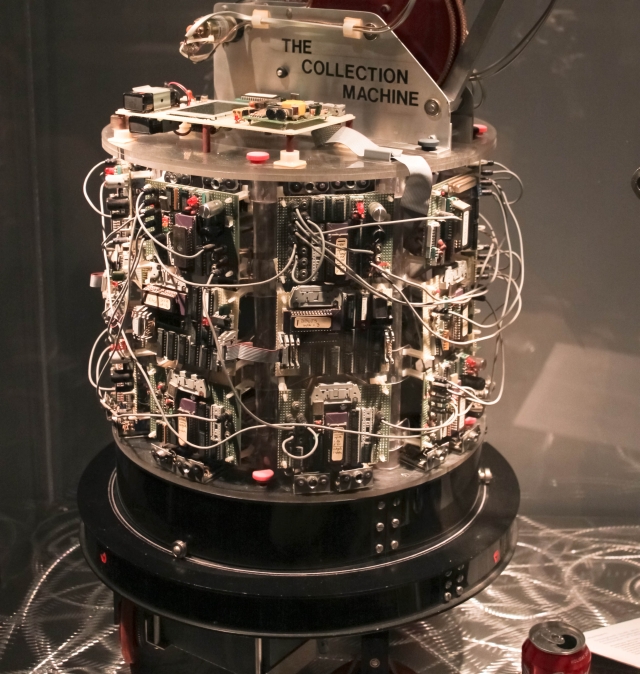
 photo-Adolfo Plasencia.
photo-Adolfo Plasencia.
See these documents-
Rodney A. Brooks, Jonathan H. Connell, and Peter Ning, Herbert: A second generation mobile robot, MIT AI Memo 1016 (January 1988). Download pdf from here.
Brooks, R.A., Intelligence without representation, Artificial Intelligence 47 (1991), 139-159 . See pdf here.
Rodney A. Brooks, Elephants Don't Play Chess, Robotics and Autonomous Systems 6 (1990) 3-15 . See pdf here.

Anita Flynn with Herbert.