"Rodney", the Self-Programming Robot is based on the book How to Build Your Own Self-Programming Robot by David L. Heiserman [TAB, 1979].
ByRamiro Molinaon September 18, 2013
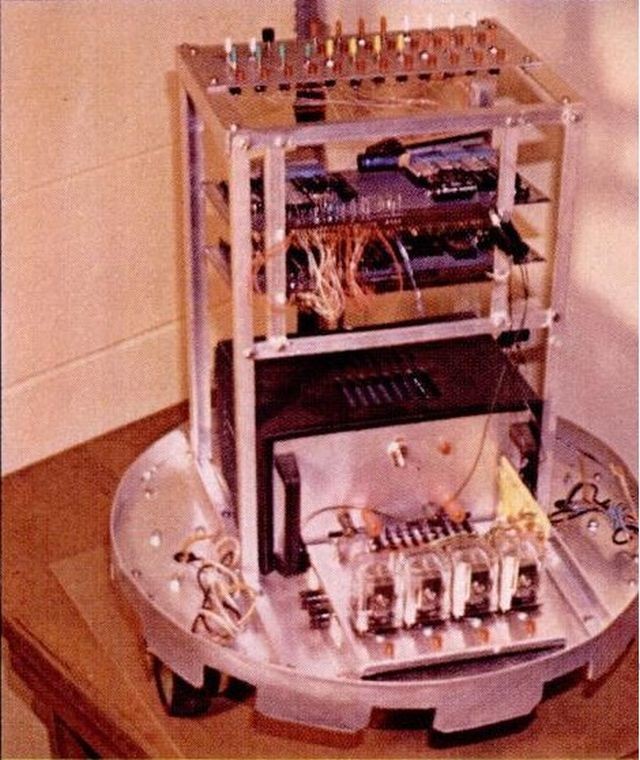
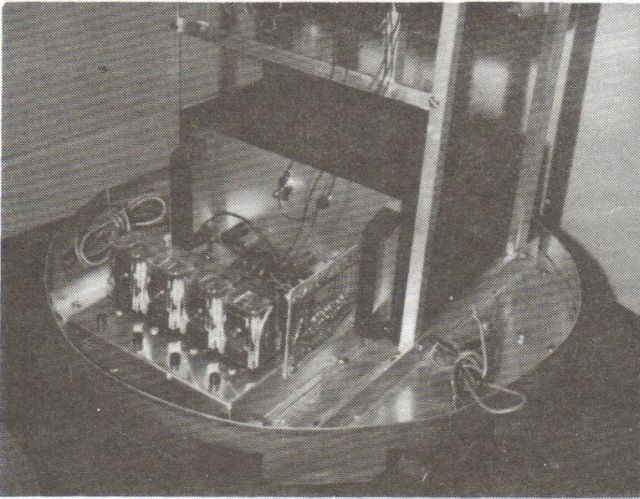
This book is geared towards those that have good knowledge of electronics and are willing to jump into a project that involves CPU based control. It outlines how to build a wheeled robot controlled by an Intel 8085 CPU, programmed by hand in binary using an array of switches that bumbles around a room on its own.
ByBenjamin Graylandon November 26, 2000
If you have an interest in robotics, and a decent knowledge of electronics, then this book is certainly worth reading. Despite its age, the information it provides is applicable today.
Heiserman tells of his own robots, specifically Rodney, who can program himself. One example given was of Heiserman handicapping Rodney, by scratching his processors and removing one of his wheels – Rodney learned to move about efficiently in a short period of time, with no assistance. Similar anecdotes are spread throughout the book.
But most importantly, the book tells the reader how they can construct a robot similar to (or exactly the same as) Rodney. Schematics, wiring diagrams and so forth fill a large portion of the book – providing a clear method for construction.
Overall, this is certainly an interesting book. Even if you don't plan to build yourself a robot, the anecdotes are both entertaining and amazing enough alone.

Classes Of Robotic Self-Learning. Source: here.
It is useful to define intelligence as in robotics according to David L. Heiserman 1979 in regards to the self-learning autonomous robot, for convenience here called "Rodney".
(1) ALPHA CLASS
While Alpha Rodney does exhibit some interesting behavioral characteristics, one really has to stretch the definition of intelligence to make it fit an Alpha-Class machine. The Intelligence is there, of course, but it operates on such a primitive level that little of significance comes from it. ….the essence of an Alpha-Class machine is its purely reflexive and, for the most part, random behavior. Alpha Rodney will behave much as a little one-cell creature that struggles to survive in its drop-of-water world. The machine will blunder around the room, working its way out of menacing tight spots, and hoping to stumble, quite accidentally, into the battery charger.
In summary, an Alpha-Class machine is highly adaptive to changes in its environment. It displays a rather flat and low learning curve, but there is virtually no change in the curve when the environment is altered.
(2) BETA CLASS
A Beta-Class machine uses the Alpha-Class mechanisms, but extends them to include some memory – memory of responses that worked successfully in the past.
The main-memory system is something quite different from the program memory you have been using. The program memory is the storage place for Rodney’s basic operating programs-programs that are somewhat analogous to intuition or the subconscious in higher-level animals. The main memory is the seat of Rodney’s knowledge and, in the case of Beta-Class machines, this means knowledge that is grained only by direct experience with the environment. A Beta-Class machine still relies on Alpha-like random responses in the early going but after experiencing some life and problem solving, knowledge in the main memory becomes dominant over the more primitive Alpha-Class reflex actions.
A Beta-Class machine demonstrates a rising learning curve that eventually passes the scoring level of the best Alpha-Class machine. If the environment is static, the score eventually rises toward perfection. Change the environment, however, and a Beta-Class machine suffers for a while, the learning curve drops down to the chance level. However, the learning curve gradually rises toward perfection as the Beta-Class machine establishes a new pattern of behavior. Its adaptive process requires some time and experience to show itself, but the end result is a more efficient machine.
(3) GAMMA CLASS
A Gamma-Class robot includes the reflex and memory features of the two lower-order machines, but it also has the ability to generalize whatever it learns through direct experience. Once a Gamma-Class robot meets and solves a particular problem, it not only remembers the solution, but generalizes that solution into a variety of similar situations not yet encountered. Such a robot need not encounter every possible situation before discovering what it is suppose to do; rather, it generalizes its first-hand responses, thereby making it possible to deal with the unexpected elements of its life more effectively.
A Gamma-Class machine is less upset by changes and recovers faster than the Beta-Class mechanism. This is due to its ability to anticipate changes.
Robotics: Robot Intelligence: An Interview With A Pioneer
Posted here on 2008-06-06 @ 19:28:20 by r00t.

A short and informal email interview with a pioneer in the field of hobbyist robotics, David L. Heiserman.
Mr. Heiserman is the author of six volumes on the subject, published by TAB Books over a span of 11 years, from 1976 to 1987. These books describe, in detail, several robotics and simulation projects he developed during those years. Each was written and designed in such a manner as to allow the reader the ability to follow along and construct each project themselves.
However, the books aren't plans so much as they are guides. They form a complete encyclopedia for a compelling subject of study, which Mr. Heiserman has termed "Robot Intelligence" and/or "Machine Intelligence":
Build Your Own Working Robot – #841 (ISBN 0-8306-6841-1), HB, © 1976
How to Build Your Own Self-Programming Robot – #1241, (ISBN 0-8306-9760-8), HB, © 1979
Robot Intelligence…with experiments – #1191, (ISBN 0-8306-9685-7), HB, © 1981
How to Design & Build Your Own Custom Robot – #1341, (ISBN 0-8306-9629-6), HB, © 1981
Projects in Machine Intelligence For Your Home Computer – #1391, (ISBN 0-8306-0057-4), HB, © 1982
Build Your Own Working Robot – The Second Generation – #2781, (ISBN 0-8306-1181-9), HB, © 1987
I first read these books as a boy in grade school, and continued to study them periodically through high school. As an adult (now almost 35 years old – where did the time go?), I collected the set for my library. Along the way, I wondered what Mr. Heiserman did with his robots, and whether he planned on publishing anything more about them or his experiments. This interview and other email conversations with him have helped to answer these questions.
PG: What, and/or who, inspired you to pursue the research of machine intelligence?
DH: I saw the robots in sci-fi films of the 50s and 60s, and I wondered how it would be possible to build one.
PG: Was Buster the initial platform for your research, or were there prior (but unpublished) platforms and/or systems you used prior to Buster?
DH: There was a prior version in 1963. I can't remember the name, but it was strictly radio controlled — vacuum tubes, no less.
PG: During the period your books on robotics and machine intelligence were published, TAB Books seemed to provide a haven for similar authors. Did they provide or do anything special to encourage this?
DH: No.
PG: Were you ever in contact with any of the other robotics experimenters (published by TAB or otherwise) during the period your books were published?
DH: No.
PG: Rodney seemed to anticipate the experiments carried out in "Robot Intelligence" and "Machine Intelligence". Were these projects inter-related?
DH: The books are pretty much a technology-based sequence. I had no idea about doing machine intelligence when I did the book on Buster.
PG: Did you ever bring together the software concepts developed in "Robot Intelligence" and "Machine Intelligence" with an actual hardware platform, or did you view the software environments you created as a better avenue for development of your ideas on machine intelligence?
DH: "Projects" was an attempt at hardware implementation, but I was more interested in computer simulations by this time. I never published my work for several weak reasons; one of which was that I was beginning to catch so much nasty flack from the amateur and quasi-professional AI community. I won't go into all of that, but let's just say I am enjoying some quiet satisfaction today.
PG: Why was the decision made to create the second generation Buster as a "hard-coded" robot, rather than continue with programmable machines as represented by the earlier Rodney?
DH: Well, I think it was because I was losing a segment of people who were not sophisticated enough to do any programming.
PG: What are the major differences between Buster as described in the original "Build Your Own Working Robot", and the Buster described in "Build Your Own Working Robot – The Second Generation"?
DH: Second Generation had better hardware designs.
PG: Whatever happened to Buster (I-III)?
DH: Buster I is somewhere down in the crawlspace of my house. The others were scrapped or given away a long time ago.
PG: What about Rodney?
DH: I gave him to a high school science class. I imagine it is gone.
PG: Do you have any current photos of Buster and/or Rodney (assuming they still exist)?
DH: No.
PG: Were any other later hardware platforms built (but left unpublished)?
DH: Rodney had a short-lived expression as a commercial product sometime in the early-to-mid 80's. It was the RB5-X, manufactured by RB Robot Corp in Golden, Colorado. I was rather well compensated for the work, but the company and my compensation soon evaporated.
PG: Are you still involved in robotics and/or machine intelligence as a hobby or otherwise?
DH: No. But I like to tinker with my own version of artificial neural networks.
PG: Do you intend on writing any further books on robotics in the future?
DH: Not as a hobby machine. Over the years, I've used my models of machine intelligence to play with ideas about extraterrestrial intelligence.
PG: Are there any thoughts or advice you would give to today's robotics and/or machine intelligence enthusiasts?
DH: Let a machine think for itself. Let a community of machines think for themselves and share their knowledge and skills.
But keep your hand on the plug.
I feel that Mr. Heiserman's work is still relevant for today's robotics hobbyist, especially for those interested in machine learning. His techniques and programming methodologies can be easily applied to modern microcontroller and PC-based systems. There are many avenues available to explore in this research, and Mr. Heiserman has forged a path ahead of us to follow. If you are interested in robotics, you owe it to yourself to pick up a volume or two of his books, and explore.
Andrew L. Ayers, March 2008
The RB5X Connection:
Heiserman also wrote some software for the personal robot RB5X. From an interview …
RN: Did you ever consider taking any of your robot designs commercial as kits or assembled robots?
DLH: I never did it on my own initiative, but Rodney appeared on the market as RB5-X. It was advertised as educational tool, and we had a couple of RB5s running around in the science center here in Columbus. The company was RB Robot, Inc., in Golden CO. When RB when bankrupt, someone else bought the rights and inventory. I don't think the machine is around anywhere these days. I was just a token consultant for the company, anyway.
David Hieserman had already built "Buster" the robot, but was developing "Rodney" the "Self-Programming" robot at the time. RB5X software utilized "Rodney" technology.
The RB5X robot comes with what the company calls Alpha and Beta level self-learning software. This "Artificial Intelligence" software, developed by David Heiserman allows your RB5X robot to learn from it's experiences.
Self-Learning Software / Artifical Intelligence
The RB5X comes complete with "Alpha" and "Beta" levels of self-learning software, which which empowered the robot to absorb and employ information from its surroundings. Developed by leading robotics author David Heiserman, this software allows RB5X to progress from simple random responses to an ability to generalize about the features of its environment, storing this data in its on-board memory.
Self-Learning: This small, first step toward true "intelligence" enables the robot to learn from its own mistakes. For example, you could set the RB5X down in a room and let it roam about randomly. It will probably run into walls several times, perhaps a desk, and maybe even a person. As it rolls around the room, it will "learn" in its own computer-like fashion where the obstacles are in a room, thus avoiding them in the future. The self-learning software are on "Alpha" and "Beta" levels, which were developed by the robotics author David Heiserman for the purpose of giving robots a simple way to "learn" from their experiences, somewhat like humans do.
See other early Mobile Robots here.